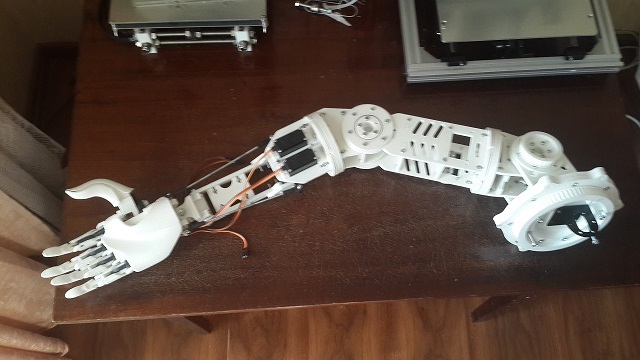
Hoje queremos falar sobre o dispositivo do manipulador de robô promocional do Oscar. Embora inicialmente não tenha sido apresentado ao manipulador requisitos industriais rigorosos, nosso objetivo era criar uma solução prática e estética, embora não fosse muito cara e relativamente simples de fazer em casa.
O comprimento do manipulador do ombro à ponta dos dedos é de 0,6 metros, peso - 2,25 kg. Materiais de fabricação - PLA. O manipulador pode ser dividido condicionalmente em 3 componentes:
- Escova biônica
- Pulso (2 graus de liberdade)
- Articulações do cotovelo e ombro (5 graus de liberdade)
Isso se deve ao fato de que cada um dos componentes possui sua própria solução técnica.
Escova biônica
Para um início rápido e fácil, foi decidido tomar como base o projeto Hackberry de código aberto. O design do pincel foi ligeiramente modificado para atender às suas necessidades.
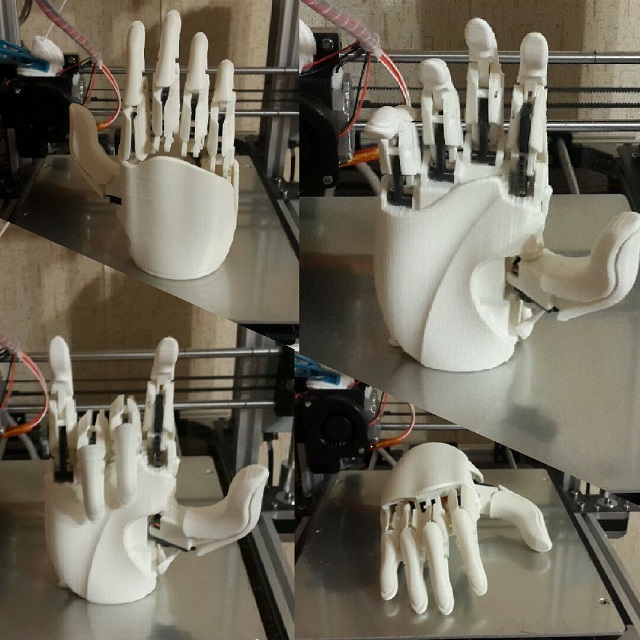
As unidades de controle de dedo estão localizadas no próprio pincel. Existem três deles. Um no polegar, um no dedo indicador e um no resto.
Com a ajuda de uma empunhadura tão inteligente, o robô pode pegar objetos volumosos, por exemplo, uma garrafa de água mineral, apertar as mãos de uma pessoa ou agarrar um objeto menor / fino, segurando-o entre o polegar e o indicador.
Wrist
O pulso tem um acionamento diferencial e é controlado por um par de hastes. Uma extremidade da haste está presa à base da escova e a outra à alavanca servo. Assim, são obtidos 2 graus de liberdade.
Para maior estética, os modelos principais do corpo do antebraço foram projetados e impressos em uma impressora 3D.

E o caso foi feito por moldagem a vácuo. O resultado é uma mão tão antropomórfica.

Na minha opinião, parece bonito.
Articulações do cotovelo e ombro
Aqui, na minha opinião, a diversão começa. Para alcançar um comportamento aceitável dessas articulações, em contraste com o estágio muito suave do desenvolvimento de um pulso com um pulso, tivemos que mexer bastante na mecânica e nos controles.
Gerenciamento, foi decidido implementar servos com base no 37Dx70L DPT usual, que tínhamos na quantidade certa de projetos anteriores.
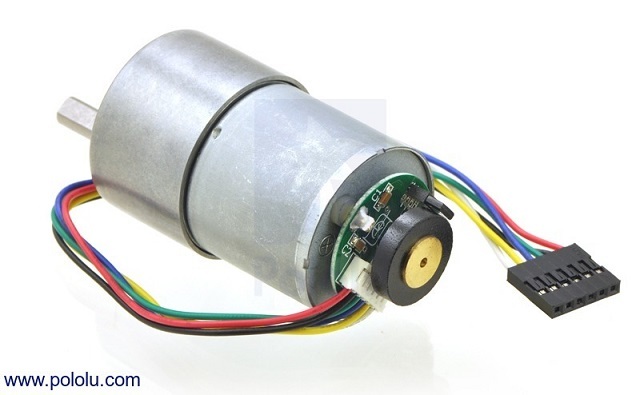
Em geral, gostamos dos dados do DPT, mas eles têm uma desvantagem, a saber, o nível de ruído. No futuro, planejamos substituí-los por outros idênticos, mas menos barulhentos.

Rolamentos e perfis impressos em uma impressora 3D formam a base da construção do rolamento das juntas. O rolamento consiste em quatro meias ranhuras unidas em pares e esferas de metal de 4, 6 e 8 milímetros.
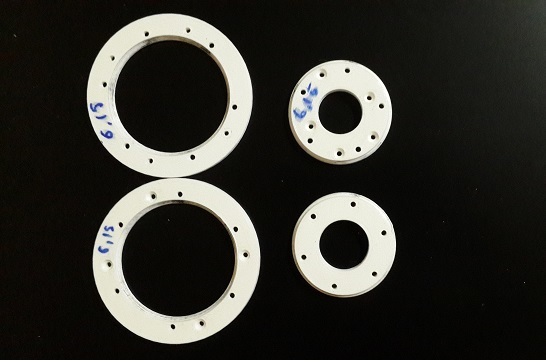
Os perfis possuem ranhuras para interconexão; também são utilizados reforços adicionais. Toda essa felicidade é unida por parafusos.
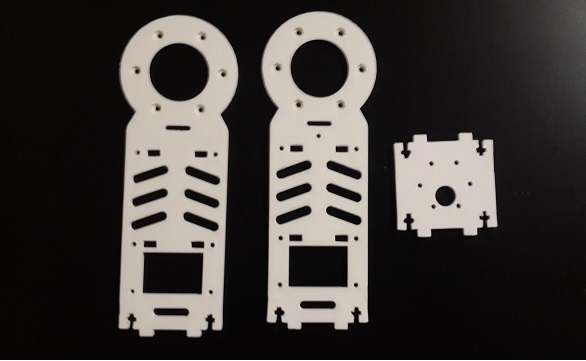
Inicialmente, em alguns graus, o eixo do motor foi preso ao rolamento por meio de um acoplamento.
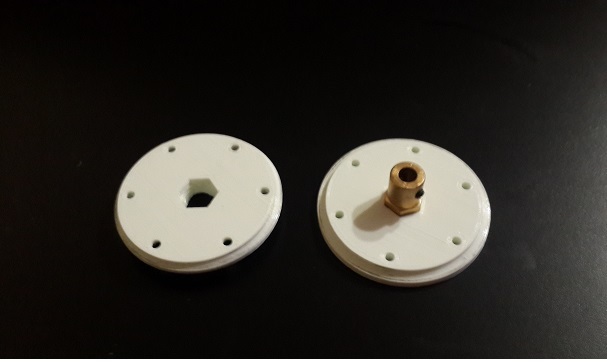
Mas, por falta de acionamentos com a velocidade e o esforço certos, redesenhamos o design dos acionamentos por correia.
Serva
Os seguintes requisitos foram impostos ao gerenciamento do "servidor":
- Controle do eixo de saída
- Ajuste de velocidade
- Ajuste de esforço (condição com um asterisco)
Primeiro, procuramos projetos semelhantes na Internet - não somos os únicos tão “inteligentes”. Com base em
um dos projetos que gostamos, ficamos muito descontentes com o resultado. O posicionamento do eixo de transmissão foi muito medíocre.
Como resultado, ficamos satisfeitos apenas com o desenvolvimento de nossa solução personalizada. Nesse assunto, o artigo
“Mantendo a posição no servoconversor: regulação subordinada versus modo passo” ajudou muito, pelo qual muito obrigado ao autor!
O esquema geral de gerenciamento foi o seguinte (o esquema é retirado do artigo acima):
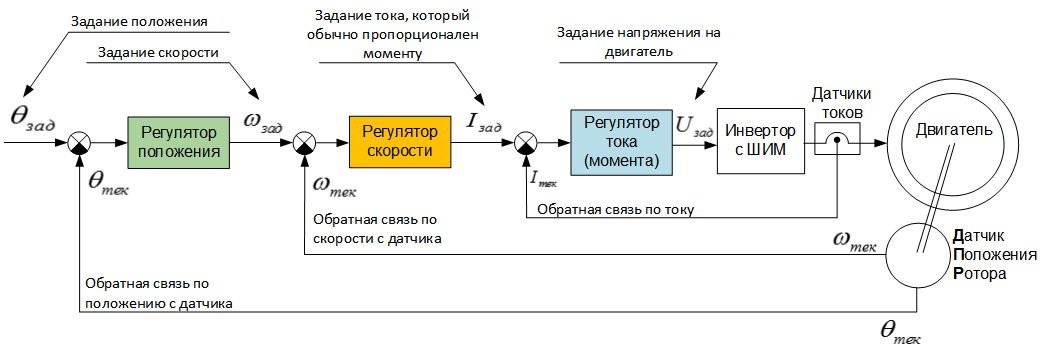
Em nosso circuito, o codificador magnético as5045 é usado como sensor de posição, e as leituras de corrente são obtidas usando o sensor GY-712 5A.
Inicialmente, o Arduino Mega era usado para controlar as unidades e, embora o resultado fosse satisfatório, acabamos mudando para o STM32F4 mais confiável e baseado em tubo.
Aqui está o resultado da unidade:
Tendo alcançado um resultado aceitável no controle do eixo de saída do “servo” sem carga, ele foi colocado no braço do manipulador. E "de repente", descobriu-se que controlar uma unidade e um manipulador são duas coisas diferentes. O problema era que o manipulador "linguiça" nos pontos-alvo, havia o chamado "ressalto de sarja". Tentamos diferentes coeficientes dos reguladores, mas tudo foi em vão.
A causa de nossos problemas foi a notória gravidade. Na posição de suspensão (quando o braço é abaixado verticalmente para baixo), para regular 10 graus na articulação do ombro, são necessários um coeficiente do regulador e outros coeficientes para alcançar o mesmo desvio na posição horizontal. Porque como o sistema não é muito dinâmico, para determinar o nível de influência da gravidade e, posteriormente, sua compensação, usamos o acelerômetro de três eixos usual, que resolveu o nosso problema. Esta decisão não pretende ser uma panacéia - é apenas o nosso caminho. Talvez entre os leitores do nosso artigo existam motoristas experientes que podem aconselhar alguma coisa.
Aqui está um teste de vídeo de um dos graus do ombro (como se viu, o grau mais difícil em termos de gerenciamento).
E, claro, o vídeo inteiro do manipulador:
No final
Em geral, estamos satisfeitos com a implementação da primeira versão do manipulador. O erro médio de todos os "serviços" varia no intervalo de 0,2 a 1 grau (não faça esta cirurgia com este manipulador). Eu realmente não gostei da aderência - muito pesada (350 gramas). Muito provavelmente desenvolveremos o nosso. No futuro, queremos aumentar a precisão de todos os graus, refazer a mecânica do pulso - colocar nosso servo "personalizado" lá e criar um sistema de segurança.
O que vem a seguir?
Agora estamos finalizando o trabalho com a cabeça do Oscar-a, que será discutido no próximo artigo.
Obrigado pela atenção! Tenham um bom dia a todos!