Olá pessoal. Hoje falaremos sobre a cabeça do robô promocional do Oscar. Muitas vezes, as pessoas estão interessadas em se comunicar com o robô como se fossem do seu tipo: olhando na cara e procurando uma resposta emocional durante o diálogo. Portanto, a cabeça do nosso robô promocional deve se tornar um dos principais elementos que atraem a atenção humana.
Para que a cabeça realmente "ganhe vida", identificamos os seguintes requisitos:
- A cabeça deve ter dois graus de liberdade: inclinação e rotação
- Deve estar presente a cabeça do interlocutor de rastreamento
- Os olhos do robô devem responder ao interlocutor
Estruturalmente, a cabeça foi dividida em duas partes:
Design da cabeça
Primeiro, começamos com o design da cabeça para entender qual será o fator de forma e como colocar tudo que você deseja na cabeça. Em geral, esse processo é iterativo e, às vezes, muito difícil, especialmente para engenheiros que anteriormente projetavam apenas engrenagens.
Após algumas iterações, fizemos um esboço, que levou aproximadamente em consideração a localização dos servos e a mecânica dos olhos.
Neck
A cabeça do robô está equipada com dois graus de liberdade: incline e vire a cabeça. A base do design do pescoço são perfis e nervuras, que já usamos no
manipulador .
Para controlar os graus de liberdade, nosso servidor personalizado é usado. Giraremos a cabeça através da velocidade, ou seja, a velocidade de rotação da cabeça dependerá da posição no quadro da pessoa que está sendo rastreada, já que o servidor pode controlar a velocidade. Quanto mais o rosto estiver do centro, mais rápido a cabeça girará. À medida que você se aproxima do centro, a velocidade diminui para zero. Assim, você obtém uma rotação bastante suave da cabeça.
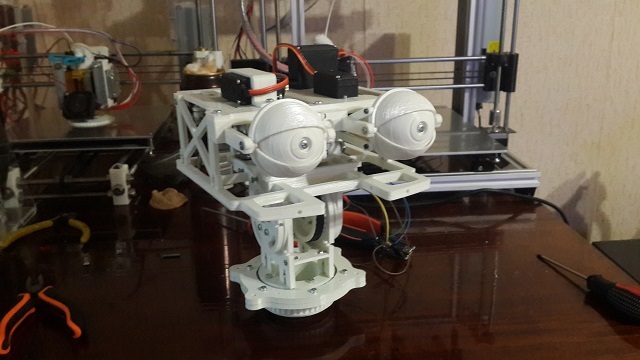
Olhos
Também aqui não queríamos gastar muito tempo, por isso decidimos procurar projetos existentes de olhos animatrônicos, é bom que esses projetos sejam uma carroça e um carrinho pequeno. Dos que encontramos, quero destacar especialmente
um projeto .
Tomamos como base. E tudo correu bem até começarmos a tentar combinar a mecânica dos olhos, o design da cabeça existente e a mecânica do pescoço. No final, tive que desenvolver minha própria “bicicleta”. O resultado foi um design de olho:

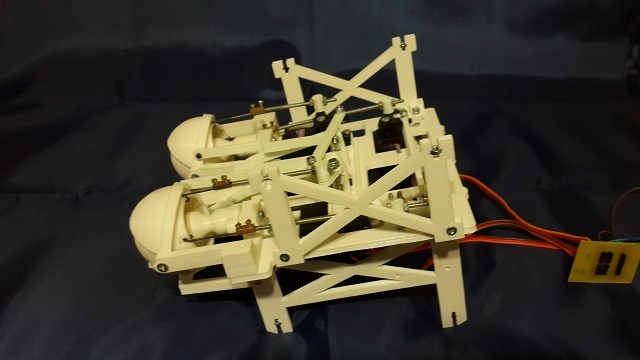
Os olhos são alimentados por arduino_nano. Para controlar o servidor, eles levaram a
biblioteca padrão. Servas são alimentados a partir de uma fonte de energia separada, o arduino não é capaz de fornecer corrente suficiente. A princípio, houve pequenos problemas com o “salto” que estragaram toda a estética. Então eles descobriram o motivo - um regulador de energia de baixa qualidade, substituindo-o por
outro similar - o problema desapareceu. E aqui está outra coisa: os servos de hobbies não gostam de fios longos, portanto removemos o comprimento extra entre os servos e o controlador. O movimento dos olhos é implementado definindo o ângulo de rotação do servo.
Como teste, usaremos a segunda pessoa do nosso estado - Dmitry Anatolyevich Medvedev. De repente, pelo trabalho duro, uma subvenção para o desenvolvimento do projeto "cairá" em sua cabeça.
Como isso funciona?
Tudo isso funciona de maneira simples, porque a cabeça e os olhos devem responder a uma pessoa, então a fonte de informação será idêntica para ela - uma câmera de vídeo localizada na cabeça do robô. Câmera usada da framboesa. A propósito, aqui fizemos uma pequena falha - tiramos uma câmera com um pequeno ângulo de visão. Durante o teste, ficou claro que é necessário colocar câmeras de grande angular - então as expressões faciais podem ser mais animadas, porque será possível desviar o olhar em um ângulo maior.
O Raspberry Pi 3 é usado como processador de imagem. Gostaria de dizer que Malinka lida com essa tarefa com confiança, mas é verdade em baixa resolução, ao mesmo tempo em que fornece uma carga perceptível nos quatro núcleos.
A detecção de rostos é realizada por um instrumento clássico - a cascata de Haar. Além disso, a frequência de detecção de rosto é de 9 a 12 FPS.
Por analogia com uma pessoa, o robô primeiro olha para o interlocutor e depois vira a cabeça para ele. Apesar da velocidade de rotação da cabeça relativamente alta disponível, diminuímos a velocidade. Trazendo a velocidade de rotação da cabeça de acordo com a velocidade de detecção de rostos, obtivemos movimentos suaves e graciosos.
Ficamos satisfeitos com nossa cabeça montada. O que você acha? O que mais posso adicionar ou fazer?
O que vem a seguir?
Agora estamos concluindo a montagem do segundo manipulador, após o qual passaremos para a fabricação de uma plataforma com um tronco. E tudo isso precisará ser exposto em um prédio decente. Vamos torcer para que, no próximo artigo, apresentemos nossa ideia em plena glória.
Você fica aqui, tudo de bom para você, bom humor e saúde!