As próteses biônicas da geração passada geralmente são controladas com a ajuda de sinais mioelétricos, que surgem como resultado das contrações musculares da mão humana. O gerenciamento de uma prótese não é fácil: requer certa concentração e a eficácia de ações bem-sucedidas deixa muito a desejar. Não é fácil fazer o que você quer da primeira vez. Em termos de precisão das ações, essas próteses estão longe das ações "intuitivas" de uma mão real viva.
Nos últimos anos, os pesquisadores se concentraram principalmente na precisão do reconhecimento de sinais mioelétricos, e a precisão do reconhecimento dos movimentos de dedos individuais atingiu 90%. Mas, por várias razões técnicas, o uso massivo dessas próteses "inteligentes" é muito limitado.
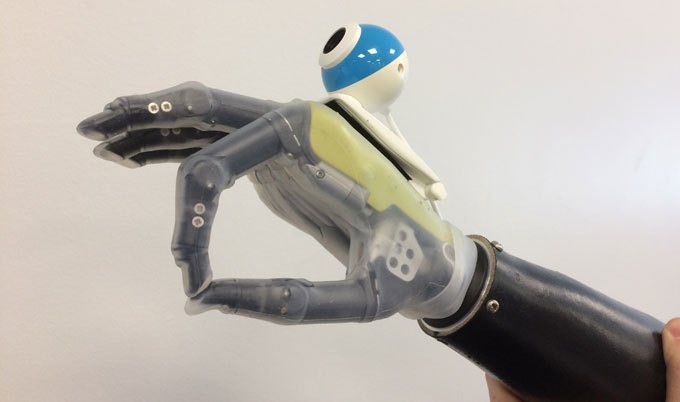
Um novo desenvolvimento de engenheiros da Universidade de Newcastle (Reino Unido) oferece uma abordagem fundamentalmente diferente. Uma mão equipada com uma câmera de vídeo reconhece um objeto à sua frente - e determina a melhor forma de agarrá-lo. Ele age de forma automática e quase instantânea, sem esforço adicional por parte do homem. De fato, a mão biônica tem sua própria visão.
Anteriormente, os cientistas experimentavam câmeras estéreo e vários algoritmos de reconhecimento de objetos. Paralelamente, novos modelos de manipuladores para robôs foram criados - ali, as tecnologias de visão computacional são muito semelhantes às próteses biônicas para pessoas. Foi no campo da robótica que foram testadas as tecnologias mais promissoras de visão de máquina e aprendizado profundo.
Os engenheiros da Universidade de Newcastle usaram esses desenvolvimentos de seus antecessores e visaram o sistema de visão por máquina para reconhecer o
tipo de captura para objetos de vários tipos, e não com base em uma medida específica de seu tamanho. Ou seja, os objetos após o treinamento da rede neural são classificados precisamente pelo tipo de captura e não pelo tipo ou categoria do objeto. Os autores acreditam que, devido a uma abordagem tão fundamentalmente nova, eles foram capazes de melhorar significativamente a velocidade do sistema, uma vez que ignora detalhes desnecessários.
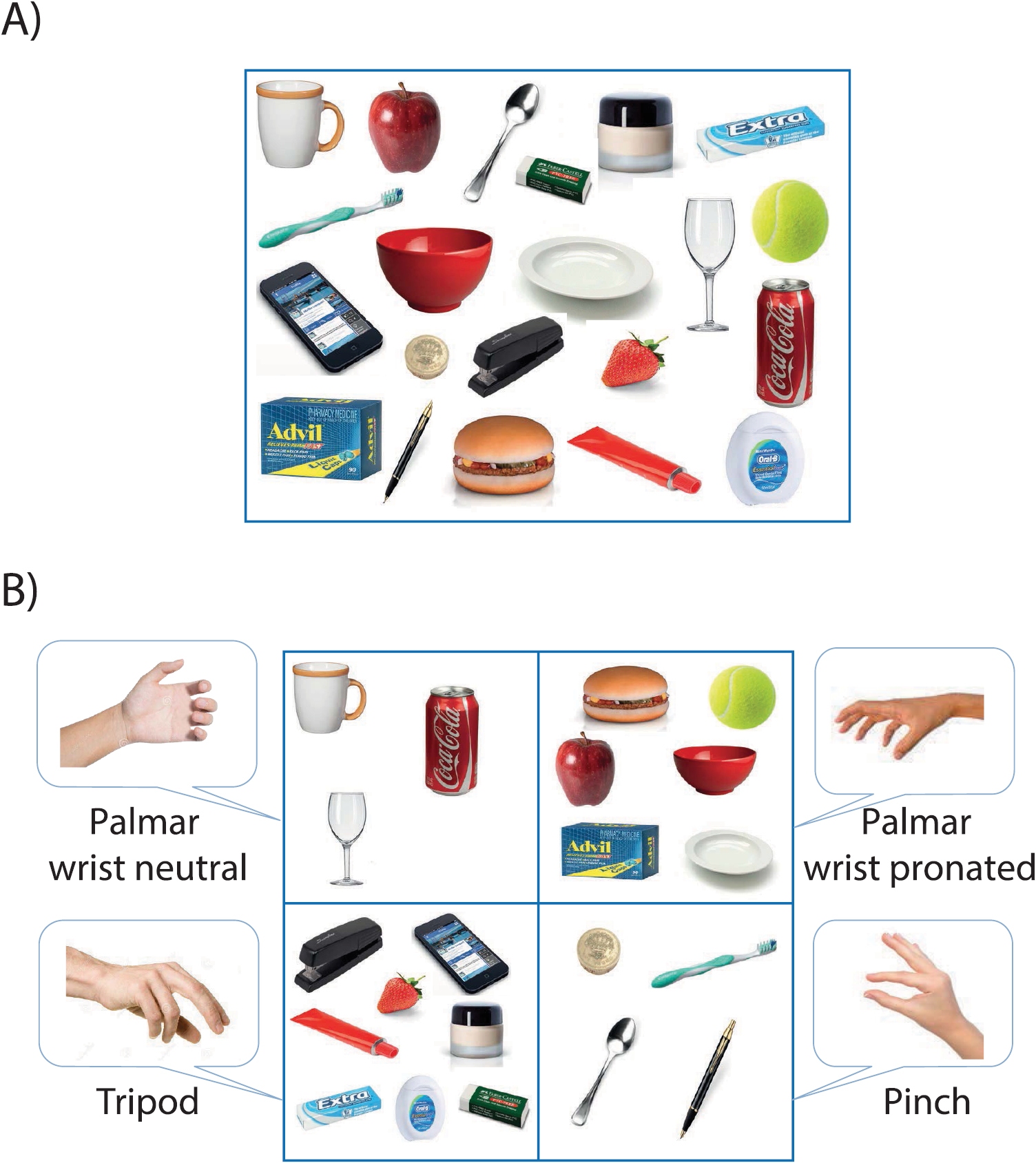 Para comparação: classificação por categoria de objeto (acima) ou por um dos quatro tipos de captura (abaixo)
Para comparação: classificação por categoria de objeto (acima) ou por um dos quatro tipos de captura (abaixo)Uma rede neural convolucional foi usada para treinar o sistema. Descobriu-se que sua arquitetura é perfeita para esse tipo de tarefa, principalmente para próteses biônicas da mão. Por exemplo, outros métodos de visão de máquina tiveram problemas quando encontraram objetos que não se enquadravam em nenhuma das categorias conhecidas. Mas a identificação de objetos desconhecidos é uma das qualidades mais importantes de uma prótese biônica com visão de máquina. Portanto, a rede neural convolucional é ideal para essa tarefa.
O sistema foi treinado no
banco de imagens de Amsterdã , onde um grande número de objetos domésticos está presente.
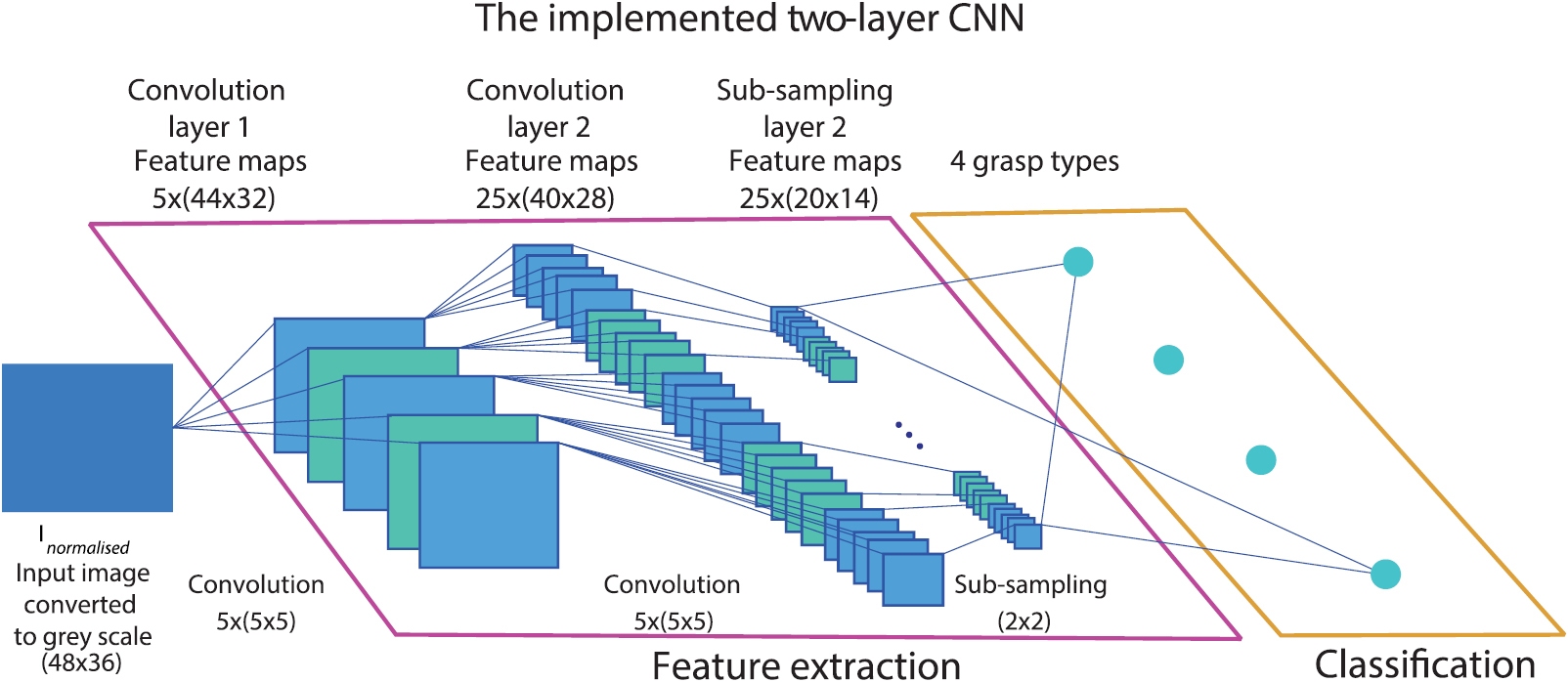
A arquitetura de uma rede neural convolucional de duas camadas para extração e classificação de recursos é mostrada na ilustração abaixo.
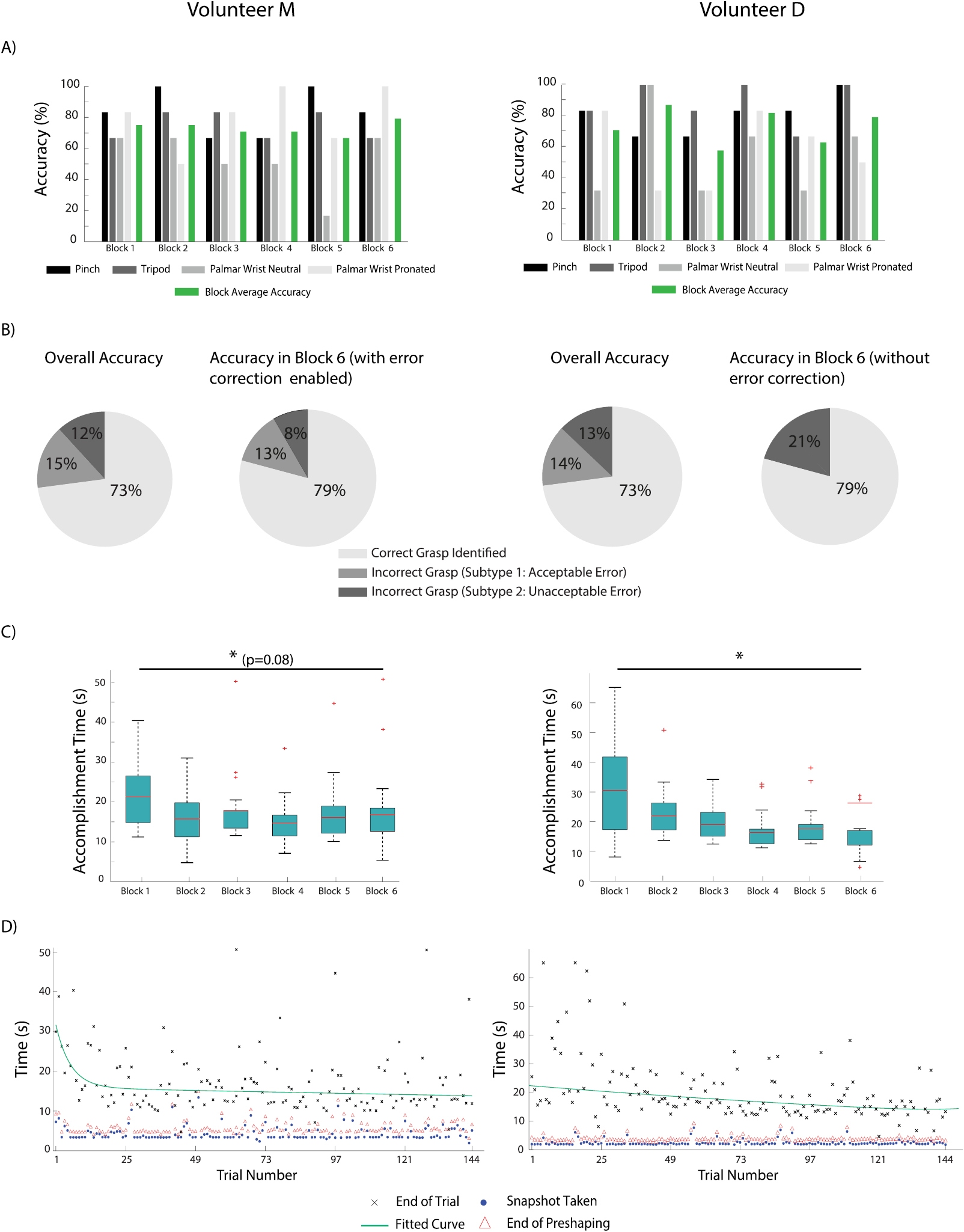
Em testes em pacientes reais com próteses, o sistema foi testado em 8 objetos conhecidos e 16 objetos desconhecidos em uma posição aleatória. Os resultados para os dois voluntários são mostrados nos gráficos à esquerda e à direita. Considerando erros permitidos, a precisão do reconhecimento e captura de objetos foi de 88% e 87% para o primeiro e o segundo voluntários, respectivamente.
Mais importante, essa prótese biônica funciona quase em tempo real: o tipo de captura é selecionado em milissegundos, em contraste com 0,75-24 segundos para os braços biônicos, onde a visão por máquina realiza a classificação dos objetos. Até as melhores próteses biônicas desse tipo,
CyberHand e
SmartHand, podem lidar com o reconhecimento em 4 e 1 segundo, respectivamente. Eles estão executando computadores poderosos e mostram uma precisão de captura de 93% e 94%, respectivamente. Embora a precisão seja um pouco mais alta, capturar em tempo real ou com uma pausa de um segundo é uma grande diferença; portanto, a conquista dos engenheiros biomédicos britânicos não deve ser subestimada. Esta é a primeira mão biônica que pode pegar objetos "intuitivamente", como se sem pensar. Uma pessoa apenas emite um sinal com um pequeno movimento do músculo de que o objeto precisa ser capturado - e uma mão inteligente com uma rede neural rapidamente faz o resto sozinha.
O artigo científico foi
publicado em 3 de maio de 2017 na revista
Journal of Neural Engineering (doi: 10.1088 / 1741-2552 / aa6802).