Hoje, quero falar um pouco sobre o que aconteceu interessante desde a
publicação do
último artigo , onde contei como nós três fizemos GPS subaquático em um ano.
Decidimos em tempo real avaliar a discrepância entre nosso GPS subaquático e o GPS real. E nem mesmo com GPS, mas com dados combinados de GPS / GLONASS. Se você está interessado no que aconteceu, seja bem-vindo ao gato!
Em geral, de alguma forma já verificamos isso, mas em boas condições "marinhas". Agora surgiu a idéia de verificar tudo de fato em uma poça. Aqui devo explicar que, para qualquer hidroacústica, os corpos de águas rasas são considerados (e não em vão) os mais difíceis. Alguns fabricantes não trabalham em águas rasas, eles dizem que há uma terrível camada superficial com gás dissolvido e múltiplas reflexões, etc.
Em geral, há uma
poça maravilhosa perto de nós
É assim que parece da costa:

A profundidade máxima é de aproximadamente 2-2,5 m, ou seja, um corpo de água mais raso no qual a navegação pode ser necessária, é difícil de imaginar.
Especialmente para as próximas experiências, um barco de isco controlado por rádio chinês foi comprado - ideal para nossos propósitos: basta (às vezes me parece que é demais) um barco espaçoso e de baixa velocidade, que permite facilmente várias modificações.
É assim que o barco parecia originalmente:

Em seguida, realizamos várias melhorias. Os eletrônicos nativos permaneceram quase todos e foram levemente movidos, com exceção do mecanismo de redefinição da isca - por desnecessário, foi completamente desmontado.
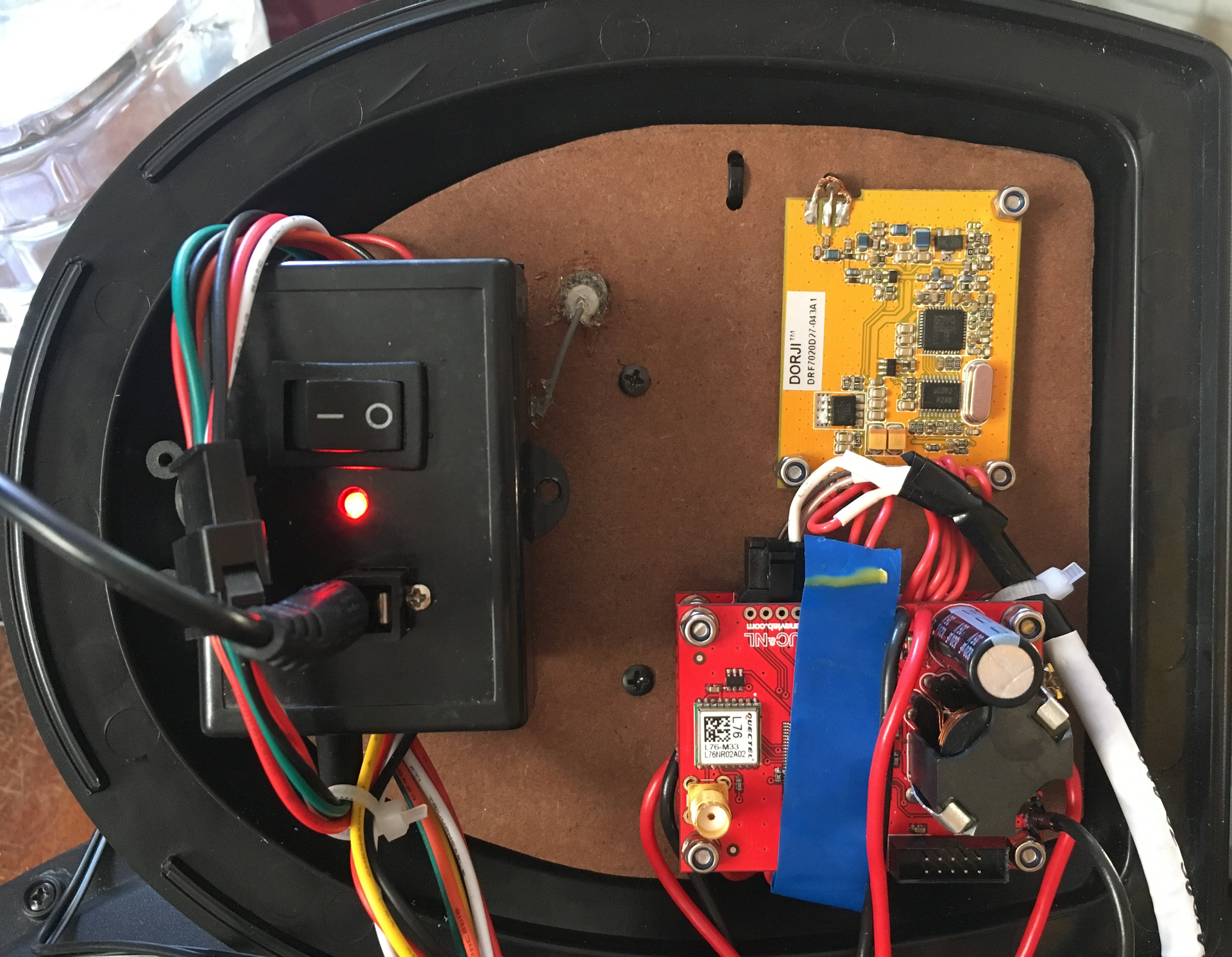
Adicionalmente instalado no barco:
- uma placa com um receptor GPS / GLONASS proprietário (não visível na foto - sob o painel do cartão duro);
- módulo de rádio DORJI de 433 MHz + antena a ele;
- nossa placa com um processador que analisa a saída do módulo GPS, receptor de navegação acústica e envia tudo pelo ar;
- uma bateria de chumbo adicional de 1,5 Ah *, da qual todos os nossos consumidores são alimentados;
- conector de carregamento do Bulgin Bucaneer;
- um interruptor de alavanca com uma tampa de borracha (como em nossas bóias), que inclui todos os nossos sistemas;
- um par de entradas simples de cabos através das quais o cabo do receptor de navegação RedNODE é inserido dentro do barco e o cabo do emissor acústico é emitido (usado em outra experiência).
Outro quadro é visível na foto - isso é apenas de outro experimento.
Como eu disse em um artigo anterior, nosso GPS subaquático é um sistema de navegação de base longa e, para operá-lo em uma lagoa, quatro bóias flutuantes de relés de sinal de navegação por satélite devem ser instaladas. Esse é o principal ponto negativo da base longa - você ainda precisa colocar algo no lago, o que significa que precisa de um barco. Mas desta vez queríamos mostrar como tudo pode ser feito exclusivamente a partir da costa.
Havia quatro de nós (sim, não existem mais três de nós!) E, de acordo com a idéia, todos levaram uma bóia com ele e foram até o ponto dele na margem do lago, onde ele colocou a bóia da costa em uma corda (para que eles não saíssem - eles não pegaram o barco) .
Aqui, no meu ponto (Bóia No. 4), parecia algo assim:

Na costa onde eu estava localizado, havia duas abordagens convenientes. Meus dois colegas na margem oposta tiveram menos sorte - há simplesmente uma praia bastante suave, coberta de juncos, pisoteada por pescadores em alguns lugares. Como resultado, como será visto a partir do local, a bóia número 3 teve que ser movida para muito longe do resto, simplesmente porque naquele local era bastante difícil se aproximar da água.
A captura de tela abaixo mostra como as bóias foram colocadas (dispostas) durante o experimento:

A propósito, olhando para o futuro, direi que as coordenadas das bóias são obtidas do receptor de navegação e não são medidas diretamente em terra.
A foto mostra muito claramente que, à esquerda da linha condicional entre as bóias nº 1 e nº 2, existe um banco de areia. De tal forma que uma garça-real caminha até lá a pé (ela tem cerca de um joelho), que desta vez não funcionou.
Do meu post, a margem oposta parece na próxima foto, e a pessoa sentada à esquerda é nossa, ele segura a bóia número 1 na corda.

Na mesma foto, nosso próprio barco é visível no processo de navegação.
É assim que fica montado ao lado de uma de nossas bóias:

Os cabos da bóia tiveram que ser mais curtos puxando-os para o olhal de carga da bóia com uma placa de nylon, caso contrário, o emissor estaria simplesmente deitado em um fundo lamacento. Na posição normal, a distância da beira da água ao transmissor acústico da bóia é de 1,5 metros. Você também pode ver que o receptor de navegação acústica está montado em um cabo suficientemente longo. Seu comprimento é de 1,5 metros, lembre-se disso, no futuro, ele explicará algumas das características dos resultados.
A influência de um cilindro que oscila livremente no movimento do barco é muito significativa. De fato, o raio de viragem dos já indecentes 3-4 metros tornou-se aterrador: em águas calmas, são necessários 10-15 metros para virar. Minhas tentativas de manter o barco no rumo com um leve vento lateral serão visíveis nos trilhos resultantes.
Falando de faixas. Antes do experimento, não havia 100% de certeza de que o sistema, em princípio, funcionaria adequadamente nessas condições. No entanto, vi o primeiro ponto na tela quase um minuto depois que o receptor foi imerso em água.
Vi isso na tela de nossa aplicação tecnológica, algo como isto:
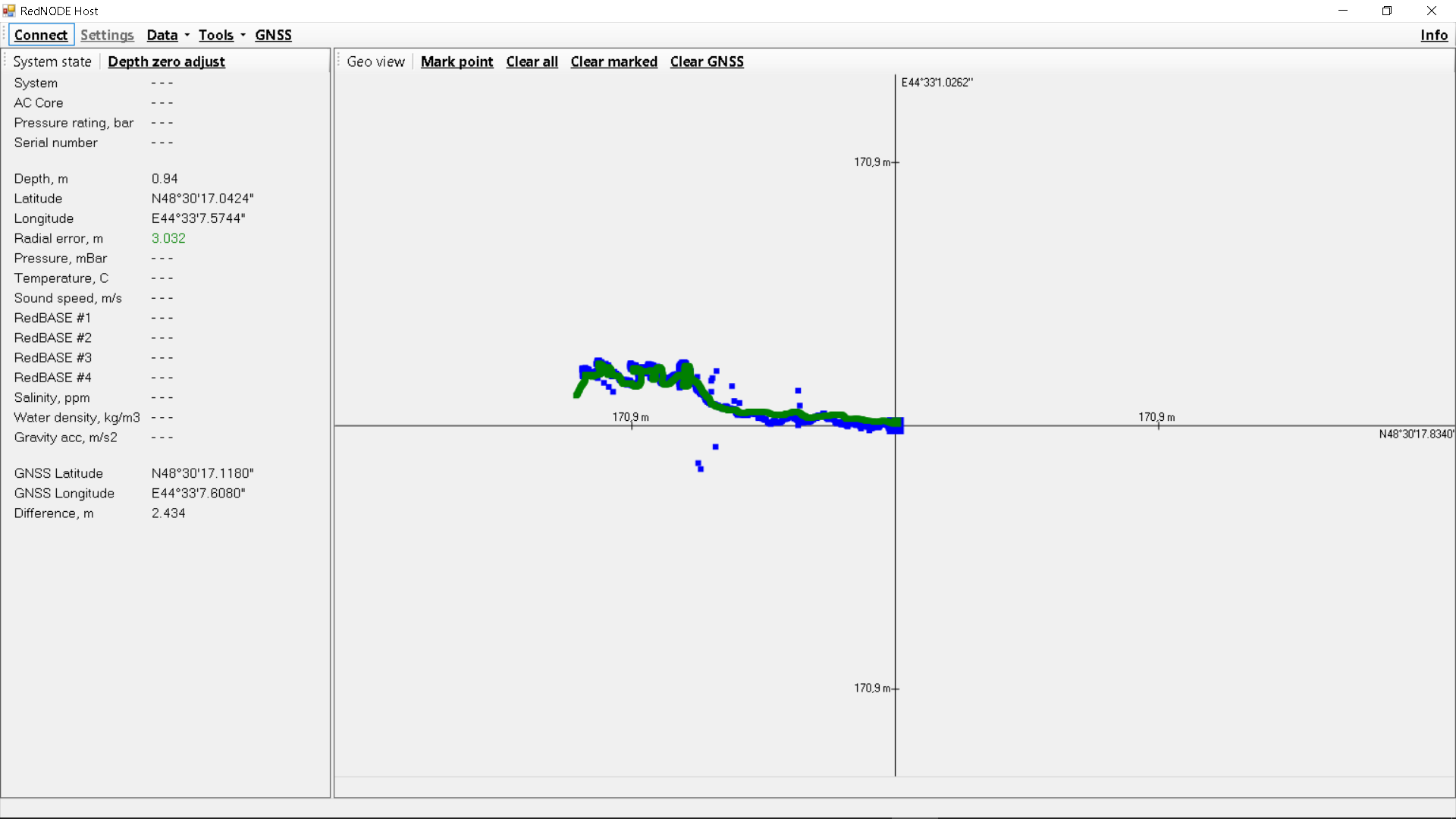
A faixa do receptor GPS / GLONASS é exibida em verde e a faixa do receptor acústico é exibida em azul. A linha inferior no painel esquerdo exibe o valor da diferença em metros entre a leitura atual de acordo com GPS / GLONASS e o sistema de navegação acústica. Devo dizer imediatamente que o "combinador" de dados coletados às pressas selecionou apenas parte das informações que o receptor de navegação transmite e muitos campos permaneceram vazios.
E, finalmente, as faixas resultantes em toda a sua glória:
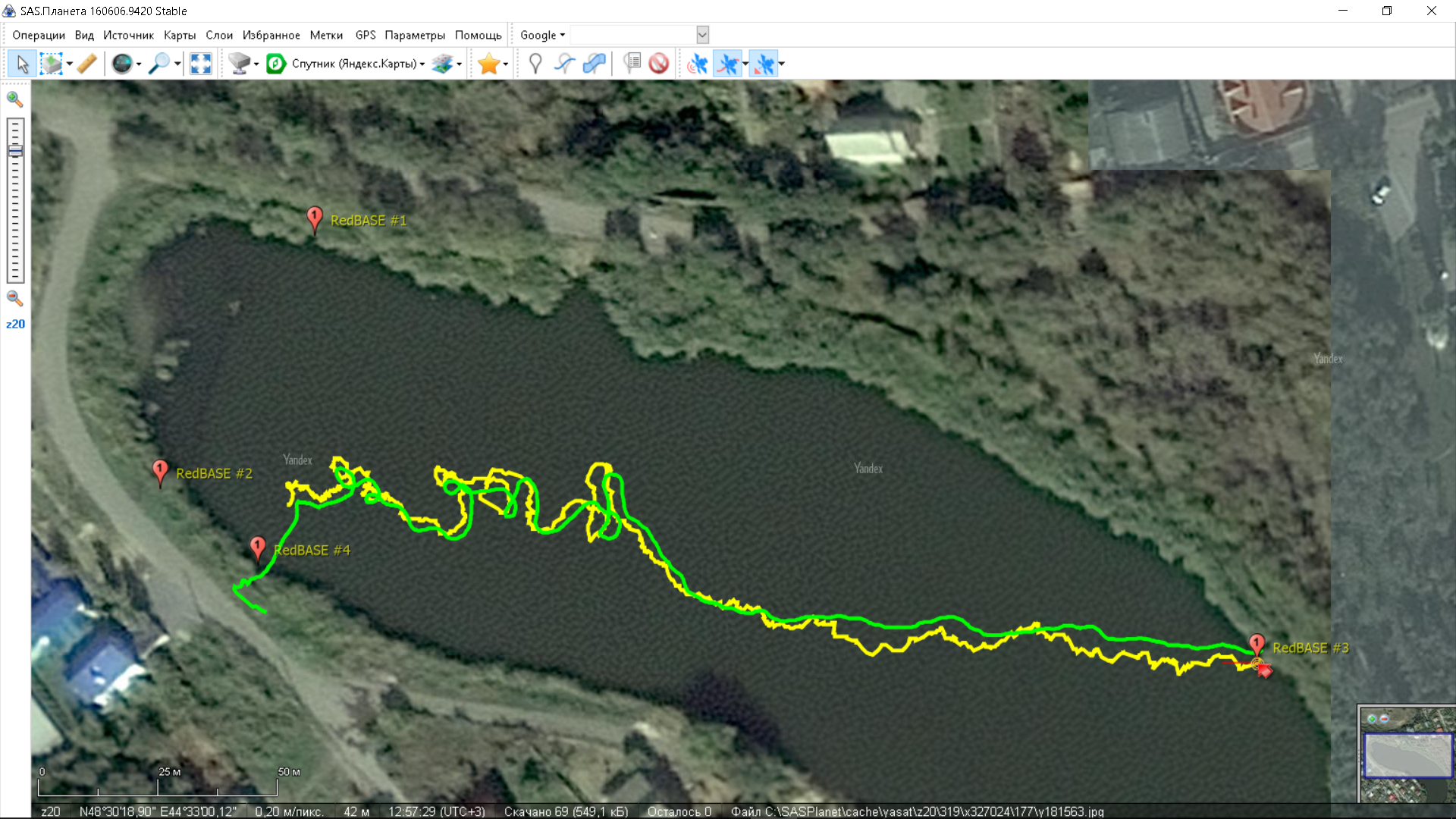
A diferença máxima entre as trajetórias em locais diferentes é de cerca de 3 metros, o que é explicado, primeiramente, pelo fato de o sistema de alto-falantes ser muito mais afetado pelo movimento do objeto posicionado na precisão da posição calculada, simplesmente porque entre a recepção de sinais das bóias ela consegue se mover o suficiente e, em segundo lugar, o fato de o receptor de navegação acústica balançar em um cabo de 1,5 metro atrás do barco, com todas as conseqüências resultantes.
Repetições da trajetória com algum atraso obtido usando o sistema de navegação acústica nas partes em que o barco estava manobrando intensamente parecem muito características.
Em geral, não planejamos uma caminhada tão longa por medo de perder o barco nos juncos, mas em algum momento percebi que era improvável que eu pudesse implantar o navio com segurança e decidi direcioná-lo ao vento, o que apenas o levou à nossa bóia. 3, onde foi salvo e pego pelo meu colega.
O que temos dos resultados do experimento?
- o sistema trabalha em um reservatório monstruoso em termos de hidrologia
- a precisão é comparável à precisão do GPS terrestre
- não requer calibração
- integra não mais complicado do que um receptor GPS convencional
- a implantação não leva muito tempo (no nosso caso, três bóias estavam na água após 5 minutos, e a quarta após outras 10 e, em seguida, todo esse tempo foi gasto para contornar a lagoa)
É inconveniente mostrar as faixas em detalhes usando a imagem. Por isso, carrego as faixas separadamente para que todos os interessados possam analisá-las:
faixas RedWAVE 12-05-2017Obrigado pela atenção.
"E isso é tudo por hoje!" (C)
Atenção! Atualização! Como se viu, se você seguir o link para a nossa
poça , poderá ver que um drone supostamente voou logo acima do local de nossos experimentos no momento da filmagem na área:
