Como prometido em um
post anterior , cheguei ao local de montagem do robô Kiki e observei todas as etapas do trabalho. Portanto, farei uma pequena turnê e falarei sobre o que consegui descobrir por mim mesmo. E, ao mesmo tempo, pedi uma desmontagem parcial do robô em funcionamento para descobrir o que havia dentro dele.
SpoilerNo final do artigo, você encontrará um vídeo com uma montagem parcial do robô.
Começarei, talvez, com o fato de o robô poder trabalhar autonomamente e sob o controle de um operador. Quando fui ao centro de desenvolvimento, fui encontrado por 7-8 robôs e alguns deles periodicamente se moviam e respondiam a perguntas. Um dos robôs estava no estágio de mecanismos de depuração e passou a
mensagem a todos os usuários do Habr.

Mas começaremos com um modelo totalmente funcional. Todos os robôs têm números de série, as séries 3 ou 4 já foram lançadas e um modelo mais avançado está sendo preparado, embora os robôs reais possam fazer muito. Vamos começar com a aparência e a interação com o mundo exterior.

O robô e o operador recebem a imagem de duas câmeras ao mesmo tempo: uma no lugar do terceiro olho e a segunda no nível dos joelhos. Esta posição não foi escolhida por acaso: através da câmera superior, o operador e o robô recebem a imagem principal para interagir com qualquer visitante. Além disso, é a imagem desta câmera que é processada pelo módulo do software de reconhecimento de rosto e determina o sexo, idade e humor. A câmera inferior é necessária exclusivamente para o movimento e o movimento do robô em torno do local ou através do labirinto de estandes em exposições - porque é rigidamente fixa e sempre observa o movimento. Há também um microfone no nível do peito - para que o sistema de reconhecimento de fala e o operador ouçam o diálogo de uma pessoa com o robô.

Em geral, no robô, existem tantos servos e graus de liberdade que você se pergunta. Por exemplo, 6 motores fornecem o trabalho da mão.
A propósito, um dos hobbies mais populares da exposição é um aperto de mão. Os desenvolvedores deliberadamente limitaram a força com a qual o robô pode apertar a mão. Além disso, Kiki move os dedos em uma combinação 4 + 1. Mas, se desejado, você pode reconstruir esse nó e fazê-lo mover cada dedo separadamente.


Em geral, os engenheiros trabalharam muito dignamente na mecânica. A cabeça pode girar e inclinar. O corpo se inclina para frente e para trás, e a própria Kiki pode se virar literalmente em um trecho.
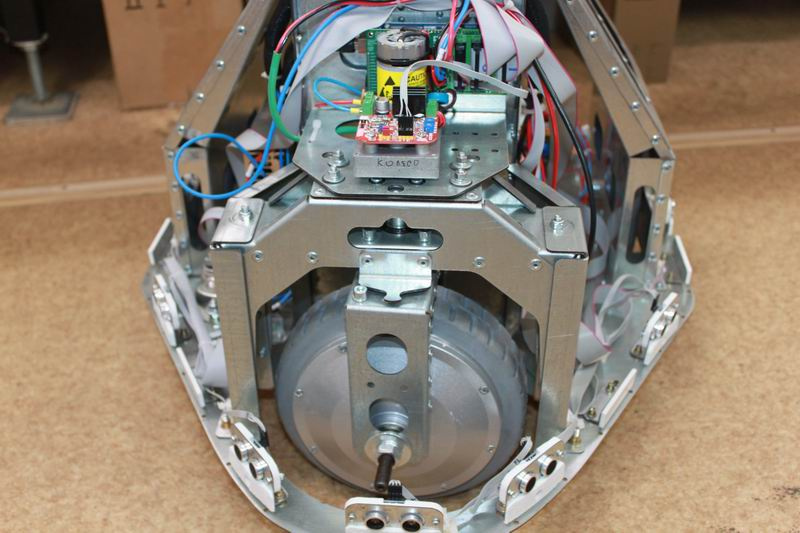
A foto mostra claramente que a roda giratória pode girar 180 graus. Na mesma imagem, sensores ultrassônicos são visíveis ao longo do perímetro da base. Assim, o robô vê um obstáculo ao se mover e pode parar ou contorná-lo - é assim que será definido pelo programa.
Todos os movimentos do robô são chamados de animações. Qualquer ação é implementada escrevendo um script no menu do robô, para que não demore muito tempo para ensinar algo novo. Simultaneamente com os movimentos, o robô pode se mover e conversar.

A estrutura de suporte é bastante poderosa, portanto, não tem medo de cargas. A própria Kiki era bastante alta, algo entre 150 e 160 centímetros; portanto, para manter a estabilidade, os engenheiros encontraram uma excelente solução: o centro de gravidade foi deslocado o mais baixo possível devido ao uso de uma bateria de gel pesada. Isso conseguiu alcançar uma alta capacidade de uma bateria livre de manutenção, um baixo preço por unidade de energia armazenada e um bom lastro para a estabilidade do robô. A duração total da bateria, sem recarga, é de cerca de 8 a 10 horas, o que é aproximadamente igual a um dia útil. Ao mesmo tempo, o Kiki pode ser conectado a uma rede de 220V a qualquer momento e será cobrado automaticamente, mantendo a operabilidade, embora com menos mobilidade.
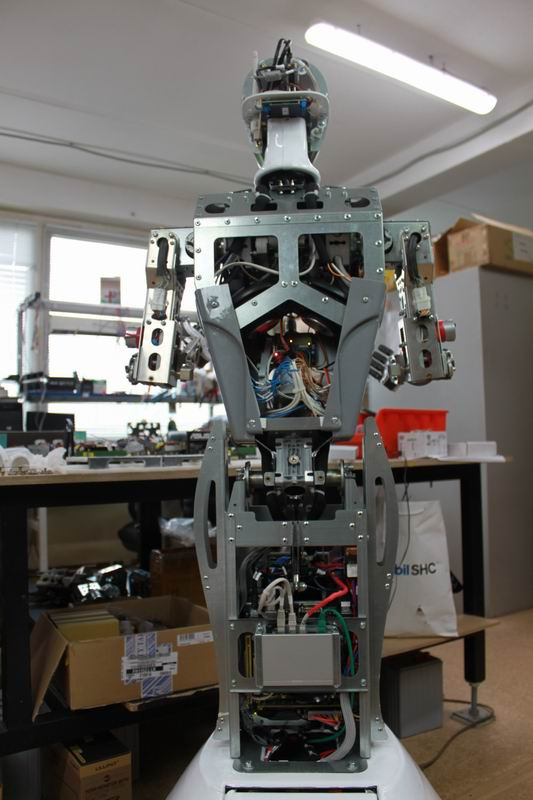
É curioso que dentro do robô exista até uma pequena rede de área local. Se você olhar atentamente, poderá ver o interruptor, no qual 4 cabos de conexão já estão presos. Vários computadores "a bordo" fornecem seu trabalho de uma só vez. Infelizmente, os engenheiros não deram uma imagem mais detalhada do ferro, citando o fato de que eles não podiam me deixar sair vivo.
Mesmo uma dona de casa pode administrá-loQuanto à gestão, é híbrida. Você pode executar o robô completamente off-line e até definir um mapa de movimento - então o Kiki percorrerá o salão, conversará, exibirá fotos e vídeos na tela e também responderá a perguntas de todos os interessados. A segunda opção: modo offline + operador. O operador controla os movimentos e, às vezes, responde a perguntas se um não estava no banco de dados. Por exemplo, o robô de Kiki está configurado para atender aos visitantes do banco, reconhecê-los por seus rostos e cumprimentá-los por nome, notificando simultaneamente o gerente pessoal de que o cliente chegou. Mas o cliente queria falar sobre o significado da vida, futuros ou criptomoedas. Nesse ponto, o operador entra na conversa, simplesmente inserindo os textos das respostas no gerador de som.
Acrescente a isso que cada um dos robôs pode ser controlado pelo operador, dentro do raio da cobertura Wi-Fi e remotamente via Internet. A velocidade mínima necessária para a operação normal é de 10 Mbit / s, mas para uma operação confortável, é melhor ter um canal de 30 Mbit / s. Além disso, todos os robôs trabalham em um servidor grande, reabastecendo o banco de dados. Assim, robôs em diferentes agências do banco reconhecerão o cliente, onde quer que ele vá.
Quanto ao lugar do operador, basta que ele tenha um laptop e uma tomada à mão.
Benefício práticoKiki às vezes é chamado de robô de telepresença. Mas isso não é todos os recursos do robô. O robô de telepresença é necessário para transmitir a imagem e a voz, bem como transmitir a voz do operador para aqueles que estão ao lado do robô. O Kiki é fundamentalmente diferente, pois pode funcionar de forma independente: mova-se de acordo com uma determinada rota, responda a obstáculos, responda a perguntas, demonstre apresentações ou vídeos na tela embutida. Ou seja, o robô da Kiki é projetado para comunicação, publicidade e interação. Isso é marcadamente diferente de todos os outros robôs.
Como ganhar dinheiro com um robôAconteceu que esse robô pode ser uma boa ferramenta para ganhar. Em muitas cidades da Rússia e países vizinhos, já é possível alugar um robô ou comprá-lo para sua organização. E se antes a anfitriã hospedasse banquetes
(com concursos interessantes), agora os robôs alugados não ficam ociosos. Portanto, cada vez mais o fabricante está sendo questionado sobre a expansão da rede de revendedores, e novos proprietários em diferentes cidades estão escrevendo para a fila de pessoas que desejam alugar um robô Kiki por um dia ou dois.
ConclusãoComo se viu, durante a exposição, o robô é periodicamente abordado e convidado a visitar: para um aniversário, abrindo uma loja ou segurando um banquete, e às vezes até para um casamento. Ou seja, Kiki está atraindo tanta atenção e não afasta sua comunicação, que muitos ficarão felizes com a presença de um robô assim em eventos significativos da vida. Talvez essa seja a introdução gradual de robôs semelhantes a humanos em nossas vidas? Espere e veja.
Você pode alugar um robô ou comprar uma casa
aqui .