NAP * - Periférico Independente Principal
Artigos anteriores sobre periféricos independentes de núcleo Microcontroladores na comutação de fontes de alimentação
Parte 2
Na parte anterior do artigo , consideramos a opção de construir um controlador PWM "típico" de uma fonte de alimentação de comutação (IIP), as opções de implementação de controladores PWM com base em um esboço e algumas topologias do IIP.
Continuaremos a familiarizar-nos com os recursos dos Periféricos Independentes Principais, aplicados à tarefa de construir fontes de alimentação comutadas.
Conversor síncrono
Se a tensão de saída for suficientemente baixa e se tornar comparável à queda no diodo, a eficiência da fonte diminuirá significativamente. Para melhorar os parâmetros IIP, o diodo pode ser substituído por um MOSFET, cuja queda de tensão é muito menor do que no diodo em conexão direta. Temos um conversor síncrono.
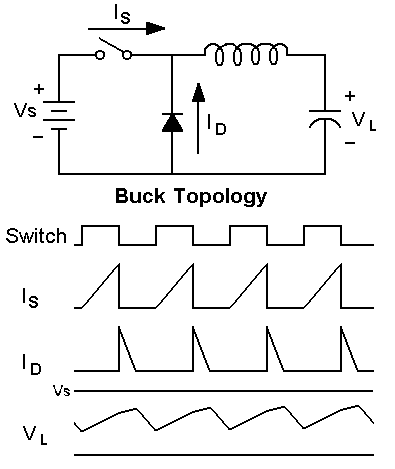
Fig. 2.1.a. Conversor Buck

Fig. 2.1.b. Conversor síncrono abaixador
Para a formação de dois sinais PWM antifásicos, um módulo periférico para gerar sinais de saída complementares (COG) é destinado.
Gerador de sinal complementar
permite controlar o período e o ciclo de trabalho de uma ou duas saídas complementares usando duas fontes de sinal de entrada. Juntamente com a capacidade de controlar parâmetros-chave, como tempo morto, apagamento, fase, polaridade, desligamento automático e recuperação automática, o módulo COG fornece uma ferramenta poderosa para a construção de um núcleo de controlador PWM. O gerador de sinais complementares nos microcontroladores Microchip de 8 bits é completamente autônomo e, no caso geral, não requer a intervenção do núcleo MK. Para um conhecimento mais detalhado do COG, recomendo consultar a descrição técnica do TB3119 [4].
O módulo COG é um pouco semelhante ao gatilho SR, também possui entradas de configuração e redefinição, mas trabalhando em eventos (Evento de subida e Evento de queda). Os eventos são registrados nas frentes / recessões e nos níveis dos sinais de entrada selecionados. Os sinais de entrada podem ser externos (portas de entrada) ou internos (timer, PWM, comparadores, células lógicas configuráveis, etc.). As saídas do gerador de sinal complementar são capazes de operar em vários modos: meia ponte, ponte completa, push-pull, PWM. Os sinais de saída são formados levando em consideração a tarefa de tempo do medidor, apagamento, atraso de fase e polaridade. Como regra, as portas de saída do módulo COG têm uma capacidade de carga aumentada (50-100mA).
Para proteger os estágios de potência de saída, são fornecidas entradas de trip, por eventos nos quais as saídas do módulo são transferidas para um estado seguro (0, 1 ou 3). Se o alarme desaparecer, o módulo poderá ser ativado automaticamente ou será necessária a intervenção do programa.
O módulo COG permite o uso de topologias com um transformador, que são comumente usados para SMPS galvanicamente isolados.
Ao construir conversores usando transformadores, também são utilizados os modos de controle de tensão e corrente com controle proporcional ou histerético, isto é, tudo o que foi considerado anteriormente na primeira parte do artigo.
Fig. 2.2 Topologias de IPS com transformadores

Fig. 2.3. Modo de controle de tensão de histerese. Opção com tensão de saída fixa e ajustável.

Fig. 2.4 Modo de controle de corrente histerética

Fig. 2.5 Modo de controle atual com controle proporcional.
Controle PWM alternado multifásico
Nos conversores multifásicos, um modo de operação intercalado é frequentemente usado, no qual a separação de corrente é usada entre várias topologias paralelas idênticas. Essa topologia permite obter uma filtragem mais eficiente (menos corrente de ondulação), reduzir o tamanho da fonte (menos filtro) e aumentar a eficiência.
Um conversor intercalado consiste em vários canais idênticos, cujas entradas e saídas são combinadas, mas as fases de controle desses conversores são deslocadas em 360 ° / n, onde n é o número de fases.
Para um conversor de impulso alternado bifásico, dois canais operam na fase antifásica - dois sinais PWM são deslocados em 180 ° entre si.
Um diagrama simplificado é mostrado na Fig. 2.6 [5] As teclas S1 e S2 são abertas alternadamente. Quando a tecla S1 está aberta, S2 é fechada, então L1 é carregada e L2 fornece a energia anteriormente acumulada para a carga. Em seguida, os canais se alternam.

Fig 2.6. Ilustração de como a fonte de alimentação comutada intercalada funciona.
Abaixo está um diagrama de um conversor alternativo síncrono de duas fases [6].
O conversor opera monitorando o valor da corrente de pico com um loop de realimentação de tensão comum, que fornece controle de dois circuitos independentes de corrente. O controlador fornece balanceamento de corrente entre fases, proteção contra curto-circuito e baixa ondulação durante as transições entre os modos de condução contínuo e intermitente.
Para retificação síncrona, são necessárias medidas adicionais para impedir que a corrente retorne à entrada quando a indutância parar de descarregar no modo de condutividade descontínua (DCM). O interruptor superior do conversor síncrono deve ser desligado quando a corrente na indutância se tornar zero.

Fig.2.7. Impulso síncrono de intercalação bifásica
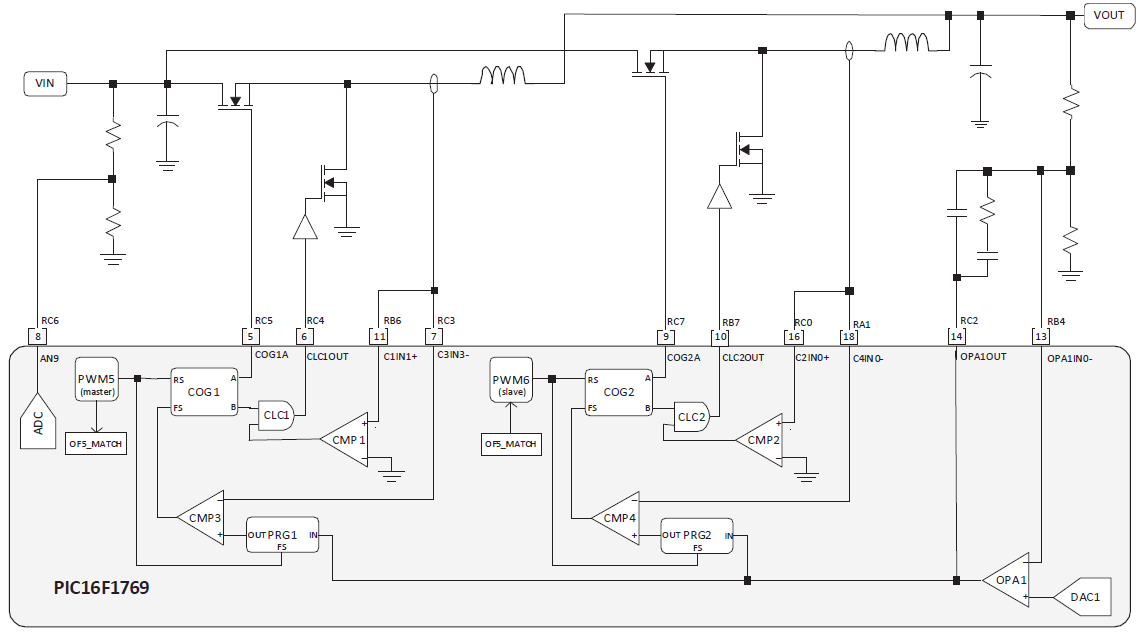
Fig. 2.8. Conversor de buck síncrono de intercalação bifásica
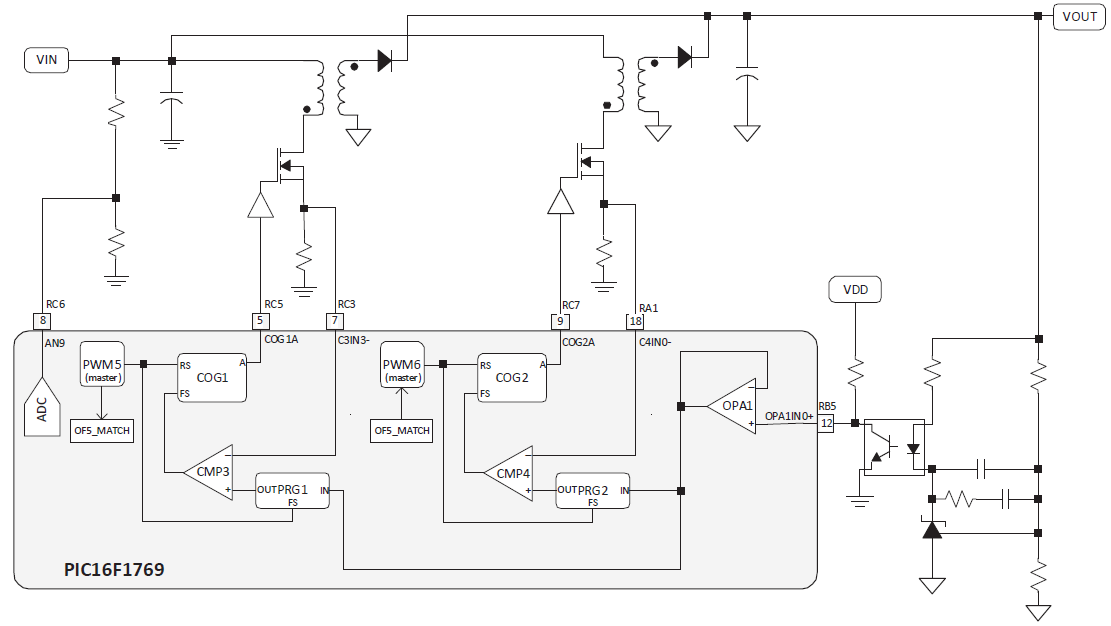
Fig. 2.9. Conversor de retorno inverso bifásico

Figura 2.10. Conversor linear de intercalação bifásico
Detalhes de várias opções para IIPs intercalados baseados em microcontroladores PIC são fornecidos no TB3155 [6].
Controle de frequência variável
Nos exemplos anteriores, a frequência de disparo PWM é definida pelo temporizador, ou seja, controle implementado com uma frequência PWM fixa.
O método de controle com frequência fixa perderá eficiência com baixas cargas, uma vez que possui perdas-chave fixas. Como estamos considerando soluções em um microcontrolador, podemos facilmente fornecer uma frequência de comutação variável, dependendo da corrente de carga e do modo de operação do conversor.
Em um controlador com uma frequência PWM fixa, o modo de corrente intermitente é mais facilmente implementado quando a corrente não flui através de nenhum elemento do conversor.

Figura 2.11. Modo atual intermitente.
Periféricos Independente do núcleo, pode ajudar na implementação do modo de condução crítico quando a corrente é atingida a zero. Nesse caso, o controlador PWM altera automaticamente a frequência de comutação para estar no modo de condução crítica.

Figura 2.12. Modo de condução de corrente crítica.
Os periféricos configuráveis permitem implementar outros algoritmos: se você definir o sinal do comparador para redefinir o temporizador, poderá implementar o controle com um tempo fixo de desligamento (tempo fixo de desligamento) ou com um tempo fixo (tempo fixo de ativação ou tempo constante constante).
O gerenciamento com um tempo de ativação fixo permite criar um IPS com corretor de potência [7].
Figura 2.13. Um controlador PWM controlado por tensão em uma configuração de tempo fixo (COT) no modo de condução crítica.
Então, examinamos algumas topologias do IIP. Todos os periféricos necessários para a implementação de controladores PWM estão contidos em microcontroladores da série PIC16F176x. Podemos implementar qualquer uma das topologias descritas na periferia, independentemente do núcleo, ou seja, o funcionamento dos controladores PWM descritos não depende da velocidade do kernel.
Para continuar ...
Artigos anteriores sobre periféricos independentes de núcleo Usado e recomendado para estudo Literatura[4] TB3119 Resumo técnico do gerador de saída complementar. www.microchip.com
[5] Dinâmica e controle de sistemas eletrônicos comutados. Capítulo 2. Modulação por Largura de Pulso http://www.springer.com/978-1-4471-2884-7
[6] TB3155 Controlador PWM intercalado multifásico com emulação de diodo usando microcontroladores PIC de 8 bits. www.microchip.com
[7] TB3153 Funções de amostra implementadas com o gerador de rampa programável. www.microchip.com