Todos estão familiarizados com o sistema Raspberry Pi, que ganhou legitimamente reconhecimento, não apenas da fraternidade profissional, mas também de singles feitos por eles mesmos. Agora vamos falar sobre outro projeto interessante no campo da robótica.
O Veterobot é um pequeno robô todo-o-terreno cuja característica especial é a abertura da tecnologia e do software de fabricação.

Um robô pequeno e elegante está literalmente abarrotado de sensores e possui uma unidade de processador bastante poderosa. O núcleo deste último é o computador de bordo BeagleBoard-xM. Este é um sistema aberto com processador ARM da Texas Instruments. Seu poder é suficiente para controlar periféricos, executar algoritmos complexos e até comprimir vídeo no formato H-264 em tempo real (usando DSP). Este último é muito necessário, visto que a bordo do dispositivo existem duas câmeras de vídeo que podem ser usadas para controlar o movimento.
Em geral, o preenchimento do robô já possui inicialmente quatro telêmetros ultrassônicos, uma bússola digital, GPS e câmeras de vídeo. O gerenciamento pode ser realizado via WLAN ou 3G (enquanto no modo de teste), e também há a capacidade de controlar remotamente o robô via Internet (para isso, você só precisa de câmeras a bordo).
Todos os componentes do dispositivo são abertos e acessíveis a todos os participantes. Portanto, os recursos deste robô são limitados apenas pela imaginação do usuário.
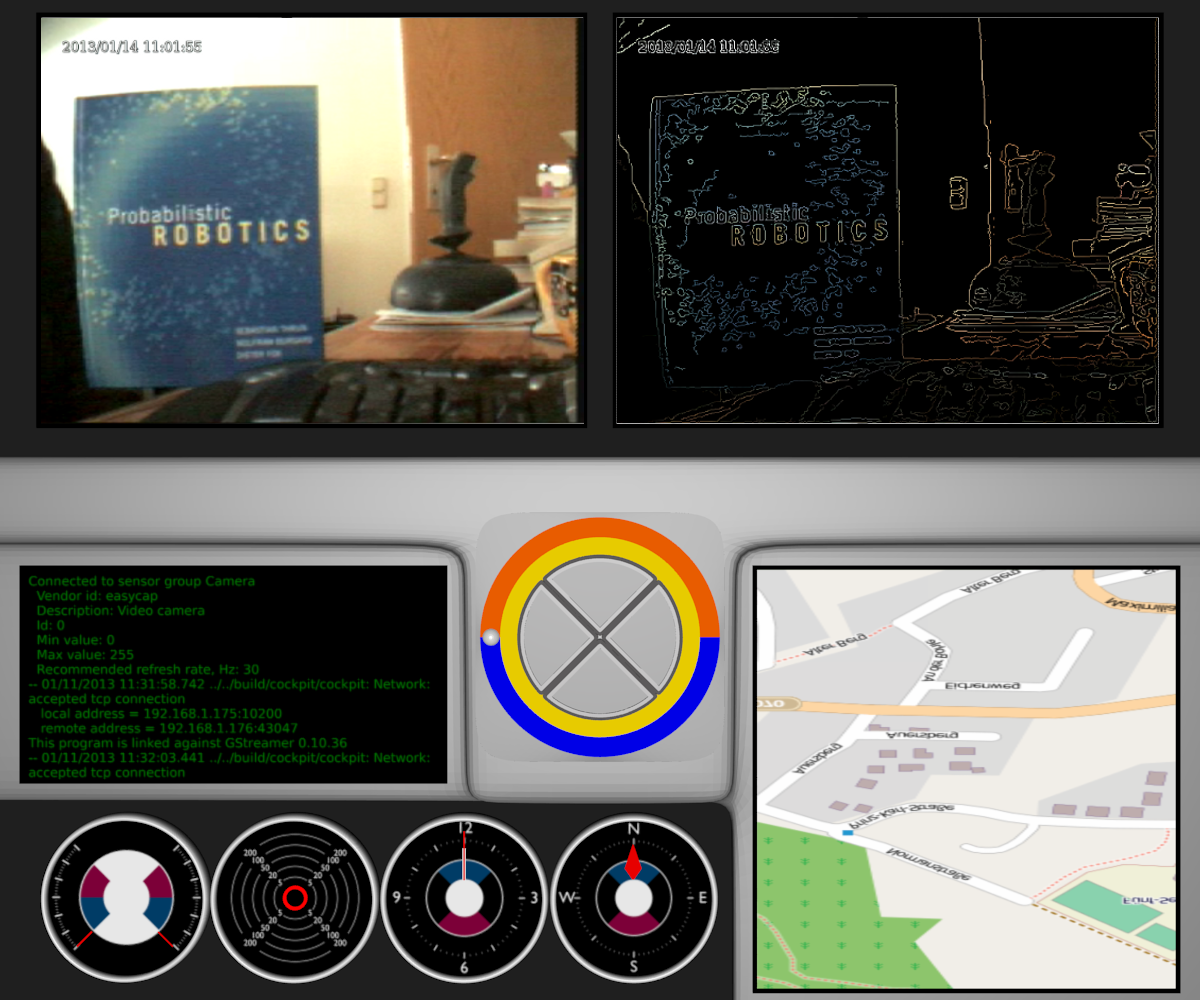
O preenchimento de software do robô consiste em uma mistura de Angstrom Linux, Xenomai, Ice da ZeroC e outros componentes. Também está incluído um programa especial que permite controlar o dispositivo e controlar as leituras dos sensores. Sua janela de trabalho está na imagem abaixo.
A tecnologia de impressão tridimensional é usada para criar o gabinete do Veterobot, e os próprios modelos foram executados no programa Blender. Uma exceção é o chassi Dagu Rover 5 acabado, equipado com dois motores com sensores de ângulo. Mas é provável que outros componentes possam estar conectados ao dispositivo. Pelo menos na
apresentação em
3D do robô, há a possibilidade de alterar o chassi, embora eu não tenha encontrado a menção disso no site. O aplicativo em si também foi feito usando o mecanismo 3D gratuito Blend4Web (a apresentação é aberta em um navegador da Web e usa WebGL), e as fontes estão no pool geral do projeto.

Como resultado, temos um dispositivo interessante que os pesquisadores ou entusiastas da robótica podem gostar. Embora o custo do dispositivo seja bastante alto, seus componentes, esquemas, modelos 3D etc. estão disponíveis para download no repositório
git-hub e o próprio site possui instruções para a montagem automática.
PS O autor do artigo não tem nada a ver com os desenvolvedores do dispositivo.