Os endoscópios flexíveis são projetados para subir nos locais mais inacessíveis do corpo humano. Não por curiosidade - mas para o benefício do paciente. Mas não importa o que o cirurgião veja usando um endoscópio, ele não pode extraí-lo ou cortá-lo com o mesmo endoscópio. Portanto, você tem que ir do outro lado, no sentido literal e figurativo, subindo no corpo humano através de cortes no corpo dele.
Um grupo de cientistas de Harvard decidiu combinar o endoscópio com um braço robótico para poder realizar operações diretamente "no local", por assim dizer. O manipulador tem vários modos de liberdade, além da capacidade de excluir certos objetos ou tecidos. O manipulador está escondido no endoscópio enquanto caminha em direção ao alvo. E assim que o lugar certo é alcançado, o papel do roboruk chega.
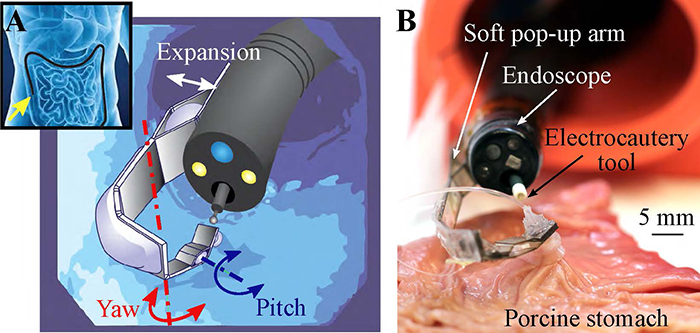 Ilustração para a descrição do conceito do manipulador e uma fotografia do próprio braço do robô. À direita, o manipulador realiza uma operação diretamente no trato gastrointestinal. Estes são apenas "testes de campo", mas ainda parecem impressionantes.
Ilustração para a descrição do conceito do manipulador e uma fotografia do próprio braço do robô. À direita, o manipulador realiza uma operação diretamente no trato gastrointestinal. Estes são apenas "testes de campo", mas ainda parecem impressionantes.De um modo geral, os robôs flexíveis encontram sua aplicação em muitos ramos da ciência, tecnologia e medicina. As características de seu design são tais que um médico (afinal, estamos falando de médicos) pode usá-las com um alto grau de eficiência dentro do corpo humano. É verdade que os recursos dos robôs são limitados.
“No nível de milímetro, os dispositivos flexíveis ficam realmente macios, de modo que não podem danificar algum tipo de tecido, mas também não podem realizar operações com esse tecido. Isso limita a aplicação de microssistemas suaves para trabalhos médicos. A questão é se podemos criar robôs flexíveis que possam desenvolver esforços suficientes sem comprometer a segurança ”, comentou Tomazzo Rantsani, um dos desenvolvedores do projeto.
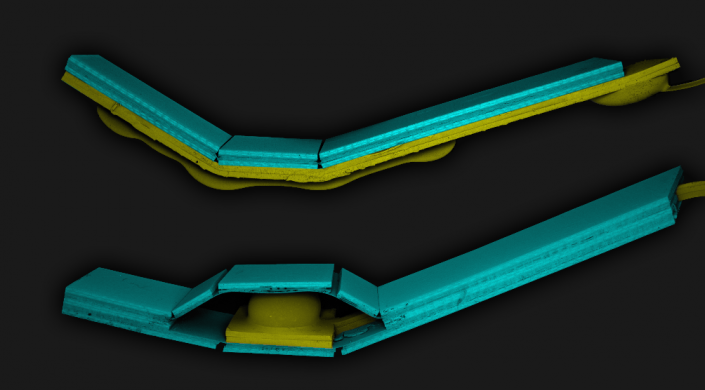
A equipe conseguiu criar um modelo de trabalho do manipulador usando um "esqueleto" suficientemente forte e elástico, cercado por materiais macios. Os cientistas dizem que, ao criar seus roborouki, eles foram guiados pelos princípios de criação de figuras de origami - papel. Como mencionado acima, o manipulador pode chegar ao objetivo, assumindo uma forma completamente diferente, empurrando, de fato, o manipulador. Depois disso, o cirurgião pode realizar as operações necessárias.
Para colocar todo o sistema em movimento, os cientistas decidiram usar atuadores que trabalham na água. Eles se conectam aos componentes fortes do esqueleto usando ligações químicas, para que não sejam necessários fixadores adesivos adicionais (ou outros tipos de fixadores). Há um manipulador e uma ventosa na lista de ferramentas, que funciona com o mesmo princípio que os ventosas dos cefalópodes. Os cientistas realizaram uma operação de teste em um esôfago artificial usando tecido de porco. O experimento foi bem sucedido, o manipulador, sem danificar o delicado tecido, realizou a operação, tudo foi feito da melhor maneira possível.
A versão mais recente do manipulador foi capaz de realizar operações com objetos em miniatura, cujo tamanho não excede vários milímetros. Além de outros elementos, o roboruk está equipado com um sensor de feedback para que o cirurgião, realizando uma operação ou exame do paciente, possa ter uma idéia do esforço necessário para executar qualquer procedimento. E essa pode ser uma das condições para uma operação bem-sucedida.
No futuro, os especialistas planejam realizar a operação já em condições reais, mas provavelmente não em uma pessoa, mas em um animal. "Nossa tecnologia nos permite desenvolver robôs macios de pequeno porte, necessários na medicina".
Robôs suaves são necessários não apenas na medicina, mas também na produção. Mais recentemente, cientistas da Universidade Científica e Técnica da China
mostraram um manipulador pneumático macio que se parece com uma lagarta. A propósito, esse sistema também foi desenvolvido em colaboração com cientistas de Harvard.
Este tipo de robô pode capturar e transportar vários objetos, mesmo pesados, siga o ponteiro e execute outras tarefas. No futuro, os chineses planejam treinar seu robô não apenas para capturar, mas também para usar ferramentas, transferindo-os para uma certa distância.