O primeiro sistema UKB-system de navegação acústica doméstica disponível no mercado
Nós não perdemos o ritmo. Desde a publicação do nosso artigo anterior,
GPS subaquático: a continuação foi quase um verão, e hoje vou lhe contar o que fizemos todo esse tempo.
No primeiro artigo sobre o nosso
GPS subaquático, fizemos uma breve revisão dos sistemas de posicionamento existentes e do sistema acústico subaquático em particular.
Abaixo, falarei sobre como criamos um sistema de base ultracurta.
Assim, no ano de 2015, prometemos nos envolver em sistemas UCB (USBL - linha de base ultracurta). A essência desses sistemas é a presença de uma fonte de sinal (farol-transponder, por exemplo) e uma antena que determina a direção de chegada do sinal. Matriz em fases ou simplesmente: antena de localização de direção.
Muitos de nossos usuários, de uma maneira ou de outra, falaram sobre o inconveniente relativo do procedimento de posicionamento da bóia e que as coordenadas são elaboradas "abaixo" (como em nosso GPS subaquático).
Às vezes, você
sempre quer prender um farol em um objeto posicionado (um mergulhador ou TNPA / ANPA) e determinar a localização em relação ao ponto de controle da superfície (barco, píer etc.) baixando a antena USBL na água. Em termos de facilidade de implantação, é o sistema mais conveniente e simples. por exemplo, o MicronNAV mencionado em nosso primeiro artigo é um sistema USBL típico, assim como
este . O infame e fabuloso NaviMate, em teoria, também foi planejado como um sistema UKB: uma bóia flutuante deve direcionar os mergulhadores, calcular sua localização absoluta e transmiti-la de volta a eles.
Direção encontrar antena coisa é bastante comum. Por exemplo, os submarinos têm conjuntos de antenas conformes contendo milhares de transdutores individuais. Obviamente, não se pode dizer que ninguém tenha desenvolvido sistemas UKB antes de nós na Rússia. No entanto, tanto quanto sabemos, o nosso é o primeiro sistema doméstico disponível comercialmente (e geralmente o mais acessível!).
Mas nada neste universo é gratuito. Por conveniência, você tem que pagar. De acordo com nosso colega, que desenvolveu o algoritmo de operação do sistema de localização de direção e é o autor do firmware da antena para localização de direção:
“O usuário UXB desfrutará da facilidade de implantação .... os primeiros 10-15 minutos. Tanto quanto seria necessário para a colocação de bóias de um sistema de base longa na área da água. "
O fato é que um erro na estimativa do tempo de chegada em 1-2 metros em um sistema de base longa não produz muito tempo, pois ± 1 metro é um erro perfeitamente aceitável nas tarefas de posicionamento de mergulhadores ou robôs.
O erro na definição do raio “primeiro” ou “direto”, no caso do sistema UHF, levará à determinação da direção de chegada de alguma reflexão (ou a soma das reflexões - “raios”), mas pode vir de qualquer lugar, tudo depende da área específica da água. Isso afeta especialmente a determinação do ângulo vertical. Capte um reflexo da superfície ou do fundo e agora você tem uma faixa de valores na faixa de 90 graus, e esse é o sistema de navegação mais ou menos.
Nos sistemas modernos (e também nos nossos), o ângulo vertical não é levado em consideração. Em vez disso, o farol do transponder possui um sensor de profundidade embutido e pode transmitir sua profundidade mediante solicitação da antena de localização de direção. Além disso, conhecendo a diferença de profundidades e o alcance inclinado, a distância ao longo da superfície é determinada trivialmente a partir do teorema de Pitágoras.
Além disso, a tarefa de posicionar a própria antena permanece separadamente. Ao ser abaixado por um cabo de um navio de apoio ou de um píer, ele oscila e torce em ondas e correntes. Consequentemente, se o ângulo de chegada do sinal é determinado no sistema de coordenadas da antena e é instável, essa instabilidade passa para o local calculado do objeto posicionado.
Freqüentemente, para evitar esses problemas, a antena é montada em um poste. Também fazemos isso, embora nossa antena tenha um AHRS integrado.
Nomeamos nosso sistema como Zima.
em um futuro próximo, planejamos lançar uma versão melhorada chamada Zima blizkoNosso sistema consiste na antena do transceptor Zima-B (ase) mais direcionada à localização. Pode ser visto na foto abaixo.
 Figura 1 - Zima-B - antena de localização de direção montada em uma haste
Figura 1 - Zima-B - antena de localização de direção montada em uma hasteE respondedores de sinalizadores Zima-R (esponder), que podem ser independentes, equipados com uma bateria (como na foto) e com interface com a operadora.
Nesse caso, o usuário torna disponível todas as nossas inovações e comodidades:
- a capacidade de transmitir até 32 comandos de telecontrole
- medição mútua da distância da antena de detecção de direção
- transferência de azimute para a estação base (se houver um dispositivo na mídia que determine a direção para o norte - uma bússola nas pessoas comuns)
O farol do transponder possui o mesmo fator de forma que o nosso receptor GPS subaquático, RedNODE. Como já mencionado, ele possui um sensor de pressão / temperatura integrado para uma faixa de 0 a 30 Bar e permite obter precisão de até 0,05 m de profundidade e até 0,1 graus de temperatura. A antena, a propósito, também é equipada com o mesmo sensor, porque de alguma forma não é inovador medir a profundidade por cabo.
 Figura 2 - Zima-R - transponder de farol (com bateria)
Figura 2 - Zima-R - transponder de farol (com bateria)Realizamos os testes gerais do sistema em 3 de agosto deste ano no rio Pichuga, na região de Volgogrado, perto do local onde ele deságua no reservatório de Volgogrado. Este é o nosso "campo de treinamento" favorito, conhecemos todos os poços e elementos de perfil pessoalmente.
No final de julho e início de agosto, o clima geralmente é muito quente. Uma camada superior aquecida aparece nos reservatórios (ocorre uma
termoclina ), a água começa a florescer; em geral, as condições se tornam difíceis. Apenas em tal e precisa testar o equipamento. Afinal, ninguém está interessado nas características que você obteve em uma piscina de medição perfeitamente afogada, todo mundo trabalha em corpos d'água reais.
Foto do momento de trabalho para a atmosfera:
 Figura 3 - Diretor de engenharia, chefe de design do sistema USBL, diretor de P&D (da esquerda para a direita) =)
Figura 3 - Diretor de engenharia, chefe de design do sistema USBL, diretor de P&D (da esquerda para a direita) =)Uma antena pode funcionar com 23 transponders (embora seja difícil para mim imaginar uma tarefa dessas, mas ainda assim). Os beacons são separados por código e o trabalho com cada um deles ocorre sequencialmente.
A figura a seguir mostra uma captura de tela do host (software de controle remoto):
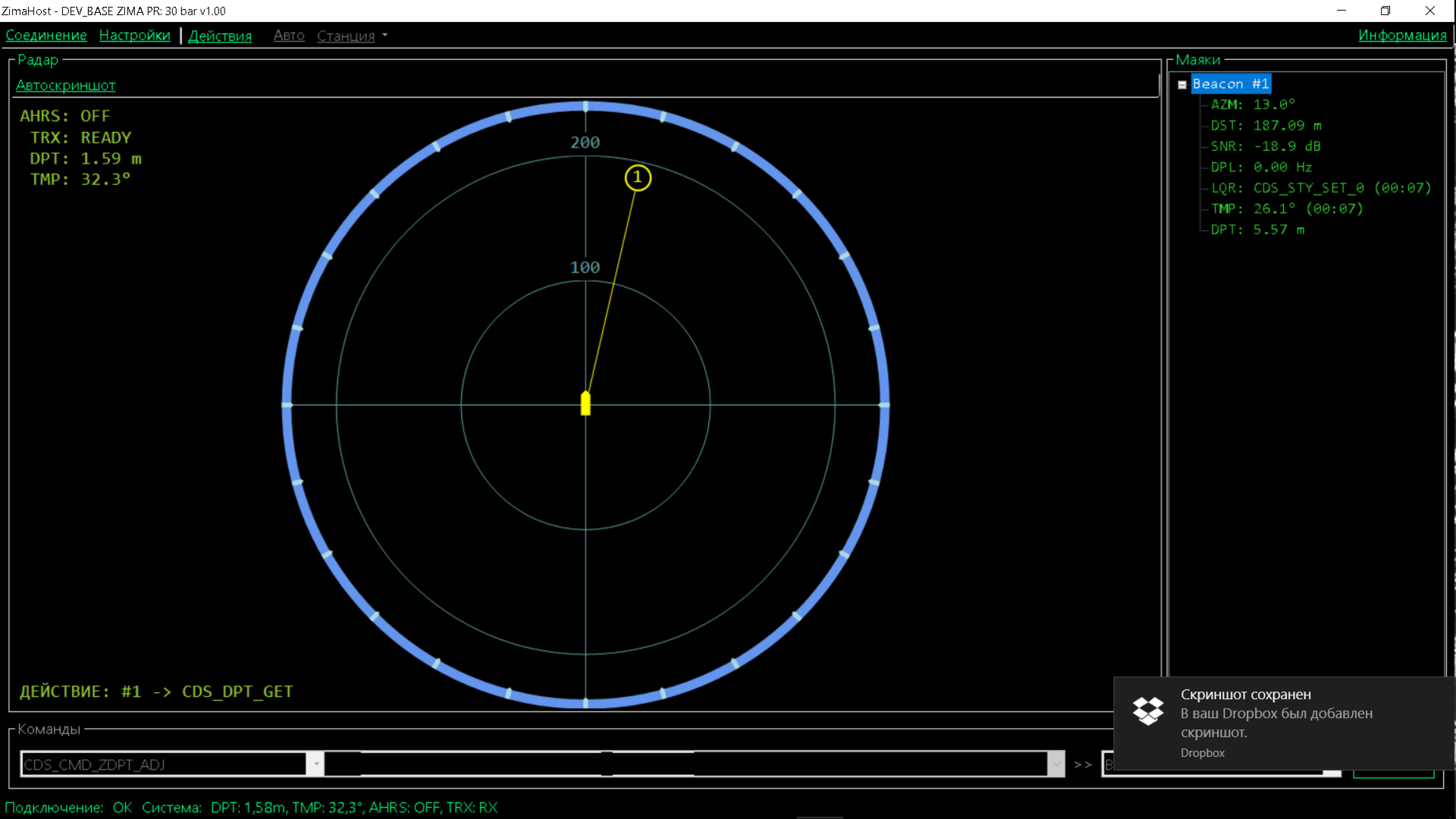
Figura 4 - Captura de tela do host Zima USBL
A antena está conectada ao PC através do adaptador UART-USB. Por tradição, usamos o protocolo NMEA0183 (aberto) e todos os códigos-fonte dos hosts estão abertos no
github .
Observe: a captura de tela mostra que o farol está a uma profundidade de 5,5 metros, a temperatura da água em seu sensor é de 26,1 ° C (!), E na própria antena, que fica a um metro e meio da superfície, é de 32,3 ° C (CARL!). a profundidade do local nesta área é de cerca de 15 a 20 metros.
Em configurações externas, o sistema precisa apenas de salinidade (a partir da qual a velocidade do som é determinada pelas leituras de profundidade e temperatura) e a distância máxima (o tempo máximo de espera para a resposta do farol é calculado a partir dele). De acordo com nosso método (para o qual uma patente está pendente), o farol também pode determinar a distância da antena e suporta a função de definir remotamente a salinidade da água a partir da estação base.
E, finalmente, a coisa mais valiosa que obtivemos neste experimento (exceto bronzeamento) é um vídeo de 7 minutos (captura de tela) do host:
ZimaHost - vídeoDeixe-me explicar que o farol estava fixo imóvel - esticado entre a âncora e a bóia, e a antena montada na haste pendia do lado do barco (de borracha). Relatividade do movimento, por assim dizer, pessoalmente: o farol faz uma volta rápida de honra com um raio de mais de 100 metros, o que é realmente causado pela rotação do barco e, consequentemente, pela antena.
Sempre temos algo a dizer. Se algo parecia incompreensível ou mal divulgado - seja bem-vindo no comentário. Meus colegas e eu vamos resolver as coisas.
PS: Nesses testes, testamos não apenas o sistema Zima, mas também vários outros dispositivos interessantes, sobre os quais tentarei escrever o mais cedo possível.
Esperando por você:
- Voz do presidente após 700 metros de cianobactérias
- caso para chamar mergulhadores
- imagem de enigma (agora!)
Tente adivinhar na foto que tipo de dispositivo é e por que é necessário: