A tecnologia antiga inspirou a criação de um futuro veículo todo-o-terreno capaz de operar a 500 ° C por anos.
O tempo mais longo que a sonda poderia aguentar na superfície de Vênus é de 127 minutos. Em 1 de março de 1982, a sonda soviética
Venus-13 desceu ordenadamente de pára-quedas e conseguiu trabalhar por pouco mais de duas horas devido ao fato de que todos os componentes do computador estavam escondidos em uma carcaça de titânio selada, previamente resfriada em órbita. A temperatura na superfície de Vênus é em média 464 ° C - é mais alta que na superfície de Mercúrio (o planeta mais próximo do Sol) e quente o suficiente para que a eletrônica convencional não funcione.
Não apenas a temperatura faz de Vênus um lugar desagradável para os computadores - a pressão na superfície é de 90 atmosferas, o que equivale à pressão a 900 m de profundidade no oceano. E se você tiver certeza de que as chuvas de ácido sulfúrico que se originam nas partes superiores da atmosfera de Vênus não atingem a superfície, saiba que está tão escuro lá (como no dia mais nublado da Terra) que a extração de energia solar será extremamente ineficiente.
 Fotos da superfície da sonda soviética "Venus-13", desceram para Venus e trabalharam lá por pouco mais de duas horas
Fotos da superfície da sonda soviética "Venus-13", desceram para Venus e trabalharam lá por pouco mais de duas horasA atmosfera abafada que torna a superfície de Vênus tão desagradável faz um péssimo trabalho ao minimizar a quantidade de dados de superfície que podemos coletar enquanto em órbita - então seria muito, muito bom se houvesse um robô lá embaixo procurando tudo para nós. A maioria das idéias relacionadas ao estudo da superfície de Vênus tem a mesma veia das sondas soviéticas: cole eletrônicos dentro de um recipiente isolado conectado a um sistema de ar condicionado incrivelmente poderoso e provavelmente alimentado por um motor radioativo Stirling com plutônio como combustível . A pesquisa e o desenvolvimento desse sistema custarão bilhões.
A abordagem tradicional de um veículo todo-o-terreno para Vênus é difícil, cara e perigosa. Mas uma equipe de engenheiros do Laboratório de Propulsão a Jato da NASA, JPL, localizado em Pasadena, PA. Califórnia, teve uma idéia inovadora para estudar a superfície de Vênus. Se o problema está na eletrônica, por que não se livrar dela e criar um veículo mecânico todo-o-terreno?
Com financiamento do programa Advanced Innovation Concepts (NIAC) da NASA, a equipe JPL quer saber se é possível construir um veículo todo-o-terreno para explorar Vênus sem sensores, computadores e fontes de alimentação tradicionais. Um autômato móvel para ambientes extremos, o AREE], poderia usar relógios, molas e outros mecanismos para fornecer a maior parte da funcionalidade do veículo, incluindo potência, armazenamento de energia, sensoriamento, movimento e comunicação - sem nenhum equipamento eletrônico. Aquecer.
 Indicador de localização Inside the Globe usado na espaçonave Voskhod
Indicador de localização Inside the Globe usado na espaçonave VoskhodEm um mundo eletrônico sobrecarregado, a maioria de nós não entende o que pode ser feito com computadores mecânicos. Dois mil anos atrás, mais ou menos um século, os gregos antigos construíram o
mecanismo Antikythera , capaz de calcular a posição do Sol e da Lua, mostrar as fases da Lua, prever eclipses, rastrear ciclos do calendário e provavelmente mostrar a posição de cinco planetas usando um conjunto de 30 bronze calibrados com precisão engrenagem acionada por um eixo com uma alça.
Entre os séculos XVII e XIX, Blaise Pascal, Gottfried Leibniz e Charles Bebbage desenvolveram computadores mecânicos capazes de vários cálculos aritméticos. Mais perto dos tempos modernos, na década de 1940, os computadores mecânicos eram usados ativamente para fins prósperos, como gerenciar o fogo de artilharia e lançar bombas.
Os russos usaram o
computador mecânico Globus para calcular a localização de suas naves espaciais até 2002, mas, em geral, tudo agora está sendo feito em eletrônica. E tudo bem, mas não em Vênus, onde o uso da maioria dos eletrônicos será impraticável.
O conceito JPL da AREE é criar um robô com um conjunto mínimo de componentes eletrônicos e, na maioria das vezes, contar com sistemas mecânicos que possam trabalhar com altas temperaturas por semanas, meses e até anos sem problemas. Jonathan Sauder é um tecnólogo e engenheiro em mecatrônica no grupo de introdução de tecnologia no JPL e o chefe do projeto AREE. Conversamos com ele para entender melhor como esse projeto começou e como tudo funcionará.
Como você teve a ideia da AREE?
Jonathan Sauder: Sentamos com vários engenheiros e trabalhamos em uma reunião de desenvolvimento simultânea. Durante uma das pausas para o café, conversamos sobre mecanismos e componentes legais e como seria legal criar uma nave espacial totalmente mecânica, como seria e onde poderia ser usada. Percebemos que seria significativo usar algo assim em dois lugares onde a eletrônica não sobreviveria: uma é Vênus, já que o maior tempo que poderíamos sobreviver na superfície de Vênus é de duas horas, e a segunda é Júpiter, devido ao ambiente radioativo ambiente que atrapalha a operação da eletrônica.
É possível construir um veículo robótico todo-o-terreno sem eletrônicos?
Na Fase I do projeto NIAC, propusemos nossa idéia de construir um veículo todo-o-terreno totalmente mecânico que não usasse eletricidade ou eletrônica, e substituir todos os subsistemas eletrônicos padrão por computadores mecânicos. Começando a estudar esse problema, percebemos que não podemos construir um veículo tradicional todo-o-terreno como o Curiosity com um processador centralizado. Precisávamos nos concentrar em uma arquitetura mais distribuída, na qual em um dispositivo existem muitos mecanismos simples que o controlam, sinalizam e dizem a ele para onde ir.
Inicialmente, queríamos realizar várias medições científicas usando mecânica. Começamos a lidar com esse problema e percebemos que não podíamos produzir dados com precisão suficiente para criar imagens ou medir parâmetros como temperatura e pressão. Existem várias opções para eletrônicos de alta temperatura - baseados em carboneto de silício e gálio - operando em altas temperaturas. O problema é que eles são muito difíceis de integrar. Aconteceu que, com a ajuda deles, é impossível organizar um sistema elétrico tradicional, e nada pode ser feito que, pelo menos, se aproxime dos requisitos necessários para a criação de um veículo todo-o-terreno. Portanto, decidimos criar uma plataforma móvel capaz de se mover, explorar novos locais e capaz de trabalhar por muito mais tempo do que os sistemas existentes.
 Conceito de AREE cedo com pernas
Conceito de AREE cedo com pernasO que iniciou o desenvolvimento da AREE?
O principal objetivo é criar a arquitetura móvel da mais alta confiabilidade possível. E o segundo objetivo já é usar tantos mecanismos simples e distribuídos que possam responder a influências externas que possam direcionar um veículo todo-o-terreno ao longo da superfície de Vênus. Observe que nas primeiras imagens, o veículo todo-o-terreno era muito semelhante ao Strandbeest - os “animais que andam” de
Theo Jansen , esculturas cinéticas que caminhavam pelas praias da Holanda. O Strandbeest trabalha com um par de sensores simples que controlam o movimento das pernas para frente ou para trás e com a lógica interna para ajudar a evitar areia e água macias.
Nos estágios iniciais do desenvolvimento do conceito, trabalhamos diretamente com Jansen: ele veio ao JPL para uma colaboração de dois dias e obtivemos dele a experiência adquirida ao longo de 30 anos trabalhando com o Strandbeest. Uma de suas primeiras dicas foi desistir das pernas. E, você sabe, quando a pessoa que criou o Strandbeest lhe diz que um veículo todo-o-terreno em Vênus não precisa de pernas, significa que você realmente precisa inventar outra coisa. O principal problema é que as pernas que funcionam perfeitamente em praias lisas e macias ficam instáveis quando você as move para uma superfície mais diversificada, como um ambiente venusiano desconhecido, o que aumenta a probabilidade de um golpe e danos ao veículo todo-o-terreno.
Como resultado, nossa arquitetura passou da fase I para a fase II, de um veículo todo-o-terreno de aparência legal com pernas para uma versão menos legal, mas mais confiável e prática de um veículo todo-o-terreno que parece um tanque da Primeira Guerra Mundial.
 Conceito de fase II, com trilhos e uma turbina eólica integrada. Com um possível golpe, o veículo todo-o-terreno ainda pode se mover.
Conceito de fase II, com trilhos e uma turbina eólica integrada. Com um possível golpe, o veículo todo-o-terreno ainda pode se mover.Você pode descrever como o AREE pode se mover na superfície de Vênus?
Desenvolvemos sistemas especializados para evitar obstáculos e determinar a quantidade de energia necessária para o movimento, em vez do sistema centralizado habitual que permite ao veículo todo-o-terreno executar vários processos ou reconfigurar o veículo todo-o-terreno usando software.
Estamos tentando simplificar esses mecanismos o máximo possível para que todos executem sua tarefa específica, mas a executem bem. Talvez a colisão do veículo todo-o-terreno com o objeto jogue a alavanca, o que fará com que ele recue um pouco, gire 90º e volte a avançar. Podemos ter apenas um sistema de prevenção de obstáculos, mas essa ação pode ser repetida várias vezes e, como resultado, pode ser usada para contornar um obstáculo.
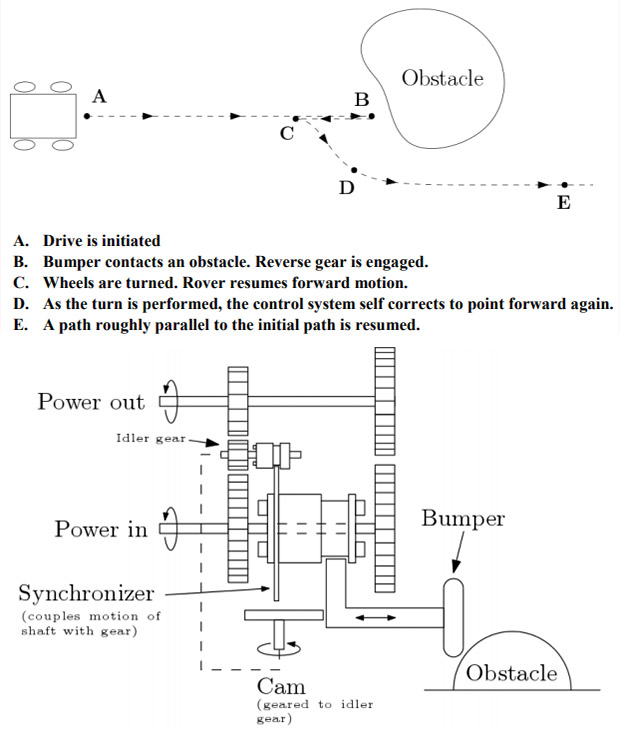
O sistema de prevenção de obstáculos usa um pára-choques, engrenagens com engrenagens e um excêntrico. Ela é capaz de retrair o veículo todo-o-terreno depois de rebater e, em seguida, engatar novamente o para-choque e as marchas e continuar a avançar. Durante o movimento normal de avanço, a força é transmitida do eixo de entrada através de engrenagens no lado direito do diagrama para o eixo de saída. As engrenagens restantes girarão livremente. Quando confrontado com um obstáculo, o sincronizador engata uma marcha à ré, o que leva ao efeito oposto. Depois que a câmera estiver totalmente girada, ele moverá o para-choque de volta à posição frontal. O mesmo excêntrico pode ser usado para girar as rodas do veículo todo-o-terreno em marcha à ré.
Quais recursos do AREE são únicos em comparação com outros projetos de veículos todo-o-terreno venusianos?
Hoje, existem vários conceitos de missões venusianas, cada uma custando uma quantia comparável à curiosidade de Marte, e oferece um pouso em um ou dois lugares. A maioria das propostas é muito complexa e projetada para trabalhar de 2 a 24 horas na superfície. Planejamos trabalhar por um mês, e é aqui que nossa principal inovação funciona - a capacidade de sondar muitos lugares na superfície de Vênus e entender como ela muda com o tempo.
Você pode descrever como o AREE perfeito atenderá às suas expectativas?
Um robô ideal será capaz de trabalhar nas superfícies mais complexas de Vênus, chamadas de
mosaicos , que são lava grossa e pedregosa, no topo, semelhante ao parquet ou ladrilho. Nosso objetivo é conduzir um veículo todo-o-terreno em tal superfície, para colher amostras geológicas que contribuirão para a nossa compreensão da evolução de Vênus. Um veículo todo-o-terreno ideal deve ter um pouco mais de 1,5 m de tamanho - agora essa restrição é imposta por um escudo térmico. Se pudéssemos, aumentá-lo-ia para 2,5 m, a fim de superar obstáculos maiores e receber mais energia do vento.
Como resultado, você precisa criar um veículo todo-o-terreno que possa superar a maioria dos obstáculos, que se arrastariam para frente, lenta mas seguramente, coletar amostras e dados climáticos.
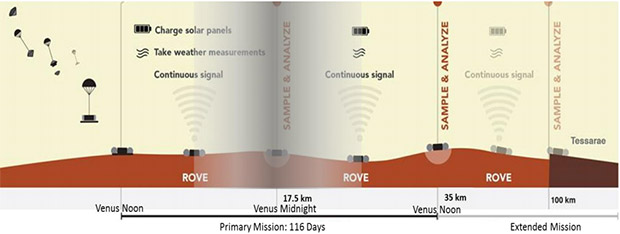 O conceito de viajar pelas planícies em direção a Tesser. Durante a parte principal da missão, que dura 116 dias terrestres (um ciclo diário venusiano), o veículo todo-o-terreno cobrirá 35 km. A missão ampliada permitirá que ele percorra uma distância de até 100 km em três anos.
O conceito de viajar pelas planícies em direção a Tesser. Durante a parte principal da missão, que dura 116 dias terrestres (um ciclo diário venusiano), o veículo todo-o-terreno cobrirá 35 km. A missão ampliada permitirá que ele percorra uma distância de até 100 km em três anos.* * *
Nesse ponto, você já deve começar a se perguntar - por que enviaríamos um veículo todo-o-terreno para estudar a superfície de Vênus, se não podemos receber notícias dele - porque sem a eletrônica, como ele pode nos enviar dados? Existem maneiras de armazenar dados mecanicamente - é muito fácil armazenar números temporariamente, e cerca de 1 megabyte de dados pode ser inserido em um fonógrafo metálico. Bem, o que vem depois?
Uma das idéias, não tão loucas quanto parece à primeira vista, é usar bolas de hidrogênio para elevar registros de metal nas camadas superiores da atmosfera de Vênus, onde serão interceptados por um drone de alta altitude movido a energia solar, lê-los e transferir seu conteúdo para um satélite localizado em orbitar. Os pesquisadores também estão considerando a opção de um rádio com tubos eletrônicos, mas, embora sejam capazes de operar em altas temperaturas, estarão vulneráveis na atmosfera venusiana e enfrentarão uma perda de tensão.
Mas os desenvolvedores da AREE tiveram outra idéia: refletores de radar. Um refletor de radar montado em um veículo todo-o-terreno pode ser visto em órbita e, colocando um obturador na frente do refletor, será possível transmitir cerca de 1000 bits de informação a cada passagem de satélite. Ao adicionar vários refletores com refletividade diferente, bem como persianas operando em diferentes frequências, você pode transferir até 32 variáveis únicas por dia. Além disso, em alguns casos, nem será possível transmitir determinados números - por exemplo, ao colocar um ventilador na frente do refletor, será possível medir a velocidade do vento em diferentes locais da superfície.
Agora, tendo criado um veículo todo-o-terreno exclusivo em recursos e confiabilidade, capaz de sobreviver em Vênus, você precisa entender que tipo de pesquisa científica ele pode realizar - e essa é uma pergunta particularmente difícil para a AREE, conforme explicado na proposta da Fase I da competição NIAC:
Um dos principais pontos fracos de um sistema puramente mecânico é o potencial de pesquisa científica. Além das comunicações, os instrumentos científicos servem como uma área-chave onde a eletrônica de alta temperatura seria útil. Medições mais complexas, especialmente geológicas, exigem soluções eletrônicas.
No final do ano passado, a NASA anunciou o programa HOTTech, um programa de tecnologia de alta temperatura que financia "tecnologia de ponta para estudos automatizados de ambientes de alta temperatura em que as temperaturas se aproximam ou excedem 500 graus Celsius". A AREE espera que, como resultado da HOTTech, existam ferramentas científicas que possam sobreviver em seu veículo todo-o-terreno - mas, para um resultado diferente, elas têm algumas idéias interessantes para fazer ciência sem eletrônicos. Por exemplo, medir a velocidade do vento usando uma turbina, temperatura e pressão usando materiais que se expandem da temperatura e propriedades químicas usando hastes que respondem a determinados compostos químicos.
 A energia eólica é armazenada em uma mola composta. O sistema mecânico no diagrama é capaz de medir a energia armazenada na primavera e usa a embreagem para transferir energia para o sistema de movimento quando está suficientemente acumulado. Se você deseja que o veículo todo-o-terreno se mova após um certo tempo ou após atingir outras condições, pode adicionar portas lógicas mecânicas que respondem a relógios ou outros sensores.
A energia eólica é armazenada em uma mola composta. O sistema mecânico no diagrama é capaz de medir a energia armazenada na primavera e usa a embreagem para transferir energia para o sistema de movimento quando está suficientemente acumulado. Se você deseja que o veículo todo-o-terreno se mova após um certo tempo ou após atingir outras condições, pode adicionar portas lógicas mecânicas que respondem a relógios ou outros sensores.Sauder e a equipe não estão tentando criar toda essa mecânica apenas por diversão. Explorar Vênus em um intervalo de mais de um dia ou dois é uma tarefa realmente importante. "Nosso objetivo não é reproduzir o que já foi feito, ou será em breve possível no campo da eletrônica de alta temperatura", diz Sauder, "mas criar um conjunto de soluções mecânicas para as áreas nas quais ainda não há soluções claras".
A tecnologia que está sendo desenvolvida como parte do projeto AREE pode ser útil em outros locais do Sistema Solar - e não apenas em locais com alto nível de radiação, como a Europa, uma das luas de Júpiter. Aqui na Terra, o AREE pode ser útil para coletar amostras perto de um vulcão ativo ou em áreas com altos níveis de radiação. Outra vantagem do AREE é que ele pode ser totalmente esterilizado em alta temperatura sem comprometer completamente a funcionalidade. Suponha que, se houver um lago com alguma forma de vida incomum sob a calota polar de Marte, você possa enviar AREE estéril para a coleta de amostras e não se preocupar com a poluição.
Agora, a AREE recebeu financiamento para a segunda fase do NIAC. A equipe está trabalhando em um desenvolvimento mais detalhado do sistema de movimentação, o que provavelmente levará à substituição de esteiras por algumas rodas, o que é mais confiável. Eles também desenvolvem relógios mecânicos que podem operar em altas temperaturas - uma das principais partes de um computador mecânico autônomo. Sauder diz que espera resultados interessantes ao construir e testar um sistema de transmissão de sinal de radar ao longo do ano. Também estamos muito interessados nisso - este é um dos robôs mais inovadores que já vimos e mal podemos esperar para ver como fica em Vênus.
A equipe da AREE liderada pelo SREE também inclui Evan Hilgeman, Michael Johnson, Aaron Parnes, Bernie Bjenstock e Jeffrey Hall [Evan Hilgemann, Michael Johnson, Aaron Parness, Bernie Bienstock, Jeffery Hall]. Jessie Kawata e Kathryn Stack são autores adicionais do relatório final da fase I.