NAP * - Periférico Independente Principal
Artigos anteriores sobre periféricos independentes de núcleo Microcontroladores na comutação de fontes de alimentação
Parte 3
Nas partes anteriores ( Parte 1 , Parte 2 ), foi discutido como os microcontroladores de Independência Periférica de Microchip permitem construir controladores PWM de fontes de alimentação chaveadas de "tijolos", estabelecendo conexões entre diferentes módulos periféricos. Se adicionarmos novos "tijolos" aos controladores PWM descritos acima, obteremos novas funções. Considere o que mais pode ser feito.
Automação de Recursos
Proteção da unidade de potência
Uma questão importante na eletrônica de potência é o fornecimento de funções de proteção. Se o feedback for interrompido, pode haver situações em que o botão liga / desliga será aberto por um tempo inválido.
Os microcontroladores PIC com periféricos independentes de núcleo (CIP) têm um timer com uma função de limite (Hardware Limit Timer, HLT).
Considere um exemplo da implementação de um controlador PWM com proteção automática (limitando a largura do pulso de saída e a possibilidade de desligamento automático).

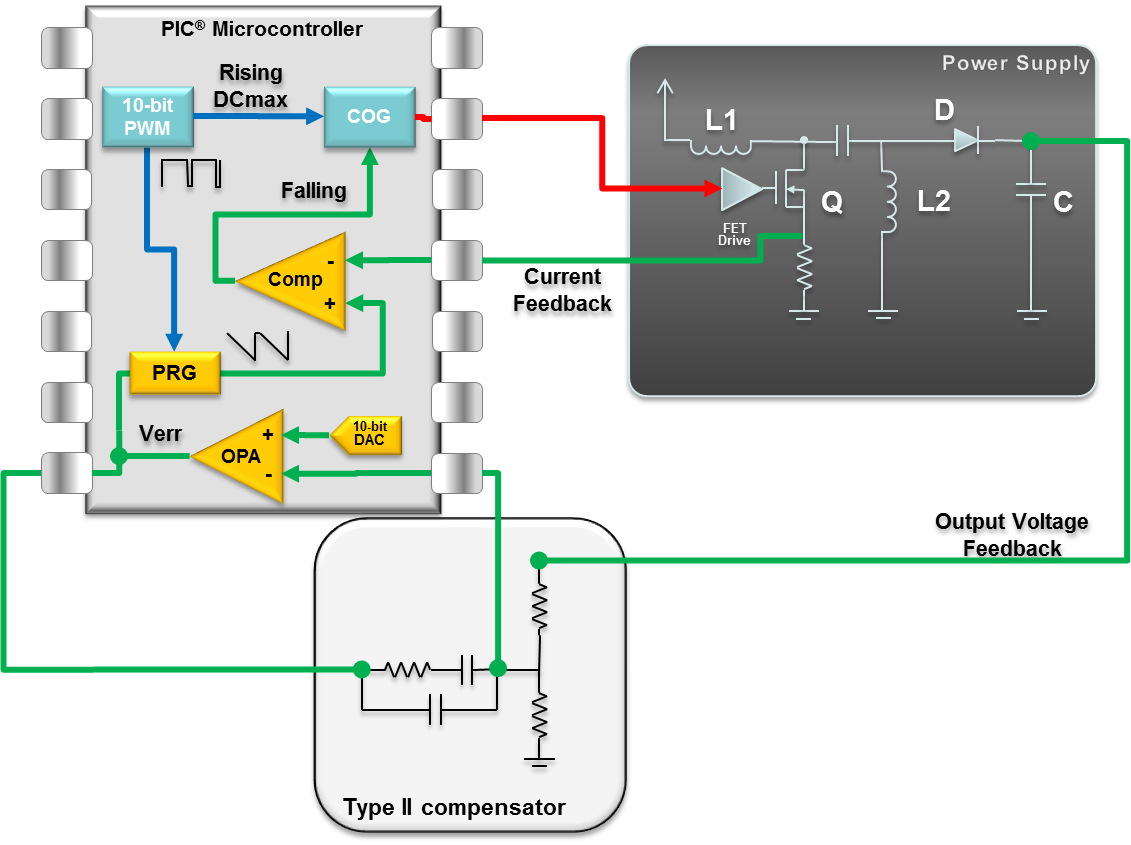
Fig. 3.1 Controlador PWM
Timer HLT1 - define o limite de tempo para o estado aberto do MOSFET; timer HLT2 - define o tempo para o estado desativado de Toff.
COG - Gerador de saída complementar - gera sinais de controle MOSFET.
Algoritmo (inicialização da periferia do microcontrolador):
- O temporizador HLT2 inicia a inclusão de COG (isto é, MOSFET de potência) e engate HLT1. A corrente através da indutância e tensão rsense aumenta. Quando a tensão coincide com Vref, o comparador é acionado.
- No modo normal, o comparador redefine o COG, ao mesmo tempo que o COG, HLT2 (Toff) é redefinido.
- O sinal do comparador fica em branco por algum tempo quando a chave liga / desliga é impedida, evitando assim alarmes falsos que podem ocorrer por interferência (na Figura 3.1, o sinal de apagamento é configurado para maior clareza no comparador; de fato, a função de apagamento é um recurso do módulo COG, não recebe o sinal do comparador).
A Figura 3.2 explica a operação desse controlador PWM.
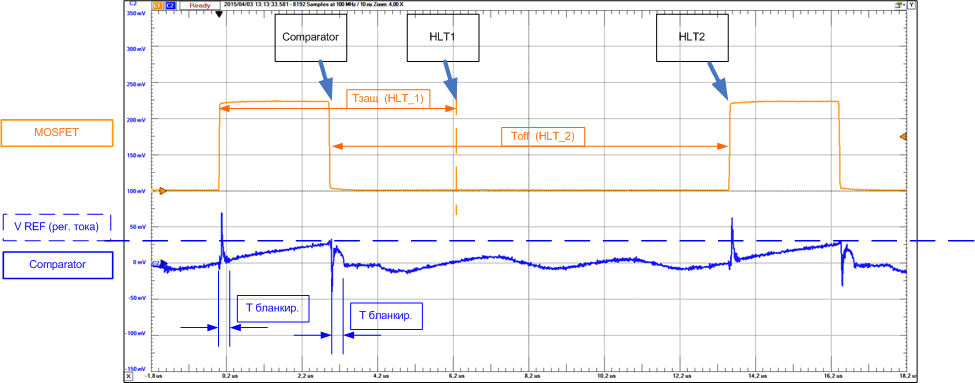
Figura 3.2. Diagramas de tensão explicando a operação do controlador PWM (Fig. 3.1).
Se o comparador não funcionar durante o tempo de segurança Tzt., O temporizador limite HLT1 redefinirá o COG e limitará o tempo de abertura do interruptor. Um tempo de abertura mais longo para a chave pode significar feedback aberto, mau funcionamento do transistor de potência ou indutância.
O módulo COG possui uma função para bloquear a operação, caso em que o programa pode desbloqueá-lo. Isso pode ser usado para diagnóstico - se o HLT1 for constantemente acionado, o programa poderá desligar o controlador PWM e sinalizar um mau funcionamento.
Arranque suave
Se a energia permanecer na indutância durante o período PWM, isso poderá levar a sua saturação durante vários períodos. Ao mesmo tempo, no início da fonte, a tensão de saída é zero e o feedback de tensão ainda não funciona. I.e. são criadas condições para saturar a indutância de potência.
Uma partida suave no controle de tensão pode ser alcançada aumentando a indutância ou formando um ciclo de trabalho baixo no início, com um aumento adicional no ciclo de trabalho.
O início suave no controle de corrente pode ser realizado limitando a corrente do loop de feedback ao iniciar a fonte.
Exemplo: partida suave com limitação máxima de corrente. O DAC e o comparador C2 limitam a corrente de pico mínima; a tensão do DAC aumenta lentamente programaticamente. Quando Vout atinge a norma, o comparador C1 começa a funcionar, interrompendo o qual você pode desconectar o circuito de partida suave e o limite de corrente (DAC + Comp2).

Fig.3.3. Controlador PWM com função de partida suave.
Proteção contra sobretensão
Adicionar um comparador C2 para analisar a tensão de saída ajudará a desligar o módulo COG quando a tensão de saída aumentar acima do limite de Sobretensão (proteção contra circuito aberto na carga, consulte a fig. 3.4).
| Controlador sem proteção | Controlador de sobretensão de saída |
|---|
 |  |
Figura 3.4
Da mesma forma, é possível organizar a proteção contra excesso de temperatura, etc.
Limitação máxima do ciclo de trabalho
Anteriormente, a implementação dessa função era considerada em controladores PWM com controle de tensão, para a opção de implementação, consulte a Fig. 3.1.
Nos controladores com controle de corrente no modo normal, a saída PWM é acionada pela frente da entrada PWM (referência) e é redefinida a partir do sinal de feedback - o comparador atual. Para limitar o ciclo de trabalho dos pulsos de saída, um PWM de referência pode ser usado, cujo ciclo de trabalho é selecionado como o máximo para a topologia IPS desenvolvida. Então, no declínio do PWM de referência, é possível redefinir com força o módulo COG (veja a Fig. 3.5).

Figura 3.5. Controlador PWM com pulsos de saída de ciclo de trabalho limitados.
Acesso a sinais e diagnósticos internos
Enquanto o Periférico Independente do Kernel forma o controlador PWM da fonte de alimentação de comutação e fecha o feedback do circuito de controle, o núcleo do microcontrolador permite funções de medição, diagnóstico e comunicação. O microcontrolador é capaz de medir corrente de pico e média por indutância, um sinal de compensação dente de serra. Juntamente com a medição dos parâmetros de tempo, isso permite que o núcleo do microcontrolador realize cálculos matemáticos e obtenha informações que não estão disponíveis através de medições diretas.
Usando a tensão de erro medida Verr, PRG e IL_min, as correntes ILpeak e IL_avg podem ser calculadas.
A medição do ciclo de serviço e o conhecimento IL_avg permitem calcular Iin_avg e Iout_avg. Usando Vin, Vout, Iin_avg, Iout_avg, você pode avaliar a potência e a eficiência da fonte de energia.
As interfaces de comunicação permitem controle externo, transferência de dados e informações de diagnóstico. Os recursos de software permitem implementar pilhas de protocolos de comunicação.
Como exemplo, o microcontrolador pode ser usado em sistemas de geração de energia de fontes alternativas com baterias de armazenamento sem o uso de microchips especializados para conversores de energia. Para esse tipo de aplicação, a conversão de energia e a carga da bateria são controladas por um microcontrolador. As funções para encontrar o ponto máximo de energia (MPPT) em conversores solares e protocolos de comunicação são implementadas em software. A interface de interação do usuário é implementada através das portas de entrada / saída do microcontrolador. Assim, muitas funções desse sistema podem ser implementadas em um único microcontrolador (veja a Fig. 3.6) e não usam vários microcircuitos e MK.

Figura 3.6.
Independentemente do núcleo, os periféricos permitem várias outras funções: limitar a corrente ou desligar a fonte durante o superaquecimento, mudar o modo de corrente intermitente para corrente contínua, etc. (mancha) do espectro de interferência da fonte.
A implementação de controladores PWM na periferia MK independente do núcleo para a implementação de um IIP de estágio único ou canal único foi discutida acima.
As famílias de microcontroladores PIC16F176x / 177x têm até 4 conjuntos periféricos do mesmo tipo, cada um dos quais pode ser usado na construção de um conversor de energia. Assim, os controladores dessas famílias podem ser o núcleo do IIP multicanal ou multiestágio e dos conversores de energia.
Programa de microcontrolador
Um IIP com implementação em um periférico independente do núcleo praticamente não requer intervenção do núcleo do microcontrolador. A tarefa do microcontrolador é reduzida à configuração inicial da periferia, após o que as funções / módulos funcionam autonomamente por sinais de feedback. O controlador pode exigir participação mínima no processamento e alteração do algoritmo de interação periférica, por exemplo, durante um início suave, alteração dos parâmetros de saída da fonte, elaboração de condições de emergência etc.
Portanto, o núcleo e o programa de microcontrolador podem executar várias de suas funções inerentes - controle, fornecendo uma interface com o equipamento de controle, indicação de modos etc.
No site da Microchip, você encontra a implementação das interfaces PMbus, DALI, DMX, amplamente utilizadas em vários sistemas com conversores de energia.
Depuração
Para depurar o sistema, não é necessário iniciar com o layout da unidade de energia. Para algumas tarefas, os recursos e periféricos do MC possibilitam formar a lógica de controle do conversor e emular os sinais de feedback da topologia do conversor de saída.
| topologia | esquema |
|---|
 | 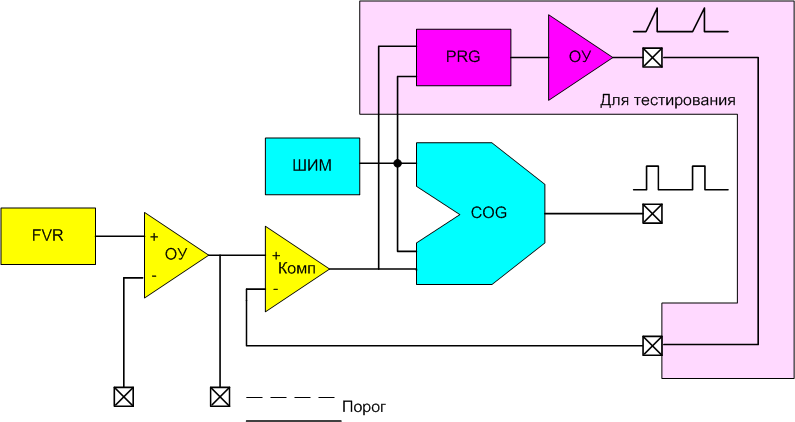 |
Figura 3.7. Um exemplo da formação de um sinal dente de serra para depurar um controlador PWM com a medição do valor atual de pico.
| esquema | gráfico |
|---|
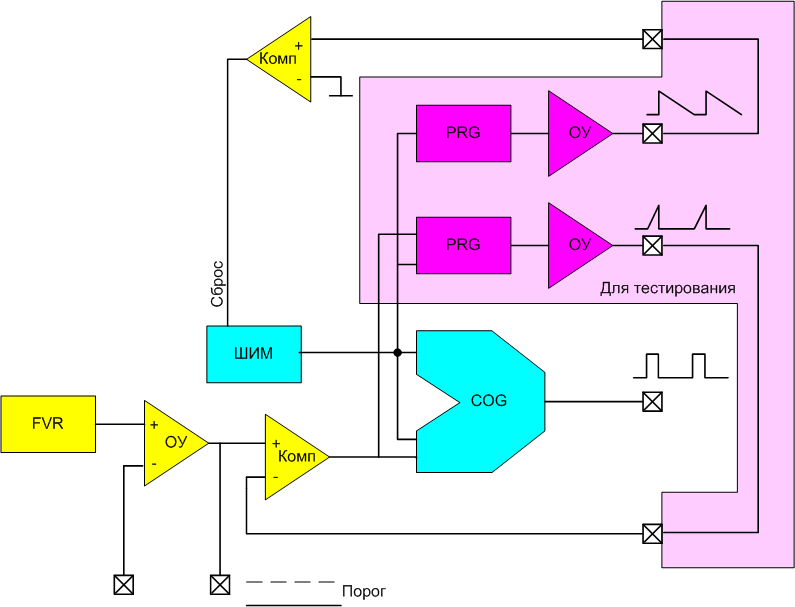 |  |
Figura 3.8. Um exemplo da formação de sinais dente de serra para depurar um controlador PWM com a medição do valor de pico da corrente e a detecção da corrente zero na indutância.
Sumário
A capacidade de configurar periféricos de forma flexível torna possível usar o mesmo MC de aplicação geral em várias tarefas, incluindo a criação de controladores PWM para conversores de energia.
Os periféricos independentes do núcleo são interessantes por si só, mas o maior benefício pode advir da possibilidade de síntese de blocos funcionais, ou seja, compartilhamento de vários módulos periféricos para resolver problemas específicos. Nesse caso, a velocidade do clock, a velocidade e a profundidade de bits do núcleo passam pelo caminho - a parte do hardware executa funções especializadas e o kernel está envolvido no suporte de software do produto.
A literatura utilizada e recomendada para o estudo:
- Site da Microchip: http://www.microchip.com/promo/dspic33-gs-digital-power
- Células lógicas configuráveis em microcontroladores PIC https://geektimes.ru/post/278718/
- Portas de E / S do microcontrolador Microchip. https://geektimes.ru/post/279374/
- TB3119. Resumo técnico do gerador de saída complementar. www.microchip.com
- Dinâmica e Controle de Sistemas Eletrônicos Comutados. Capítulo 2. Modulação por Largura de Pulso http://www.springer.com/978-1-4471-2884-7
- TB3155. Controlador PWM intercalado multifásico com emulação de diodo usando microcontroladores PIC de 8 bits. www.microchip.com
- TB3153. Funções de amostra implementadas com o gerador de rampa programável. www.microchip.com
- Keith Billings, Taylor Morey. MANUAL DE FORNECIMENTO DE ALIMENTAÇÃO SWITCHMODE
- Marty Brown. Livro de receitas da fonte de alimentação.
- AN2122. Flyback SMPS usando um microcontrolador como unidade de controle. http://www.microchip.com
- 20097 PC7. Projetando conversores de energia inteligentes usando CIPs (Core Independent Peripherals)
Microchip MASTERs Training 2016. - AN2456. Configurabilidade em um controlador de fonte de alimentação de modo comutado. http://www.microchip.com