A ficção científica está cheia de robôs voadores. Também existem robôs humanóides voadores criados à imagem do homem. São máquinas autônomas e exoesqueletos, que são controlados por dentro, como o Homem de Ferro. Mas, na realidade, ainda não vimos esses robôs. Existem multicopter, mas eles não podem andar no chão, como uma pessoa. Os engenheiros do Instituto Italiano de Tecnologia decidiram corrigir essa falha - eles desenvolveram a
arquitetura do robô humanóide voador iCub com quatro motores a jato e um sistema de controle para ele.
Este é um dos primeiros robôs do mundo capazes de voar, andar e manipular objetos, ou seja, capturá-los com manipuladores.
Os robôs humanóides são tradicionalmente considerados máquinas terrestres que se movem na superfície. Mas os cientistas italianos têm certeza de que, se você adicionar motores a jato a um robô, o escopo de seu uso aumentará significativamente, pois terá mais graus de liberdade. Se comparado aos veículos aéreos não tripulados tradicionais, eles também são às vezes equipados com manipuladores que podem capturar objetos, mas, novamente, um robô humanóide tem uma vantagem sobre eles, pois pode andar no chão. Isso aumenta a confiabilidade e a eficiência energética do sistema.
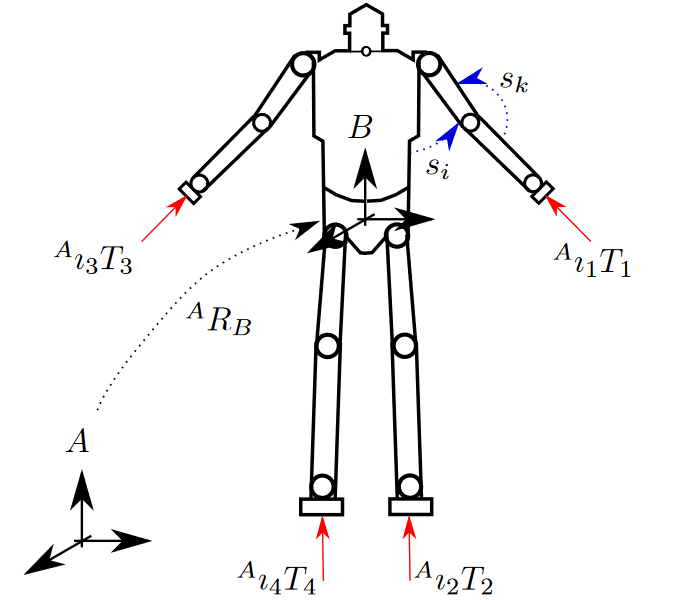
No projeto do Instituto Italiano de Tecnologia, quatro motores a jato são instalados nos efetores do terminal, ou seja, os "braços" e "pernas" do robô. Esse arranjo dos motores parece um pouco antinatural, mas, de fato, esse circuito multimodal já foi testado em outros modelos. Os engenheiros dizem que isso permite estabilizar a trajetória calculada em relação ao centro de massa, levando em consideração pequenos desvios na orientação da estrutura de suporte do robô.
O desenvolvimento italiano está longe de ser prático. Os desenvolvedores chamam de "o primeiro passo para criar robôs humanóides voadores" e é realmente apenas o primeiro passo. O que os engenheiros fizeram foi desenvolver uma estrutura básica para controlar a
simulação do robô iCub durante um pairar estacionário no ar e um movimento suave. O impulso do motor também é calculado no programa de simulação e é levado em consideração no cálculo do sistema de controle. Este trabalho comprova que a criação de um robô e seu controle são
teoricamente possíveis, embora os desenvolvedores não levem em consideração os efeitos aerodinâmicos e outros fatores que podem se manifestar na operação prática do robô. Tudo terá seu tempo - tanto esses cálculos quanto os primeiros experimentos com vôos reais serão posteriores, mas agora a tarefa era garantir que, teoricamente, fosse possível controlar o movimento de tal mecanismo no ar.
O vídeo mostra como o robô congela em um só lugar e também calcula a trajetória desejada para o centro de massa.
Um dos desenvolvedores do iCub, Daniele Pucci, disse ao
IEEE Spectrum que ele teve a ideia de criar um robô assim, quatro anos atrás, quando se mudou para trabalhar no Instituto Italiano de Tecnologia. Depois, pensou em como aplicar seus desenvolvimentos no campo do controle de VANTs a robôs com várias "partes do corpo", ou seja, não um corpo completamente rígido.
Daniele Pucci acredita que os robôs voadores do tipo humanóide têm muitas vantagens sobre os multicopters convencionais, equipados com manipuladores robóticos. Estes últimos costumam ter problemas com o vento, porque não podem ficar firmemente no chão e, portanto, exigem um controle mais preciso ao tentar capturar um objeto estacionário. Além disso, o robô humanóide tem dois manipuladores, e não um, o que simplifica ainda mais a tarefa.
Outra vantagem é social. No futuro, esses robôs podem realmente ser usados como exoesqueletos para humanos, à imagem do Homem de Ferro. O exemplo de
Richard Browning puxando um exoesqueleto mostra que tais invenções serão necessárias - de fato, quem de nós não quer voar em uma caixa de ferro com motores a jato?
 Richard Browning pairou um metro acima do solo
Richard Browning pairou um metro acima do soloO artigo científico foi
publicado em 16 de fevereiro de 2017 no site de pré-impressão arXiv.org (arXiv: 1702.06075) e submetido à publicação na revista
IEEE Robotics and Automation Letters .