
Anteriormente, em nossas publicações,
levantamos repetidamente
o tópico do uso de quadrocopters em telecomunicações. Vários
estudos de caso sobre esse tópico foram publicados em nosso blog.
No entanto, hoje vamos nos concentrar no uso de helicópteros na organização de redes sem fio. Isso já foi dito mais de uma vez e eu lembro que o Facebook iria distribuir a Internet ao redor do planeta com a ajuda de drones. Eles também planejavam usar drones no Ministério de Emergências, por exemplo, ao organizar cobertura de rádio a curto prazo enquanto organizavam várias operações de resgate ou outros eventos. Em geral, em todas as situações em que é necessária a rápida implantação de redes sem fio.
Neste material, gostaria de apresentar um
estudo de especialistas estrangeiros, que demonstre claramente os resultados de um experimento com um drone atuando como ponto de acesso.
Sobre a metodologia e os recursos dos dispositivos experimentais
A placa Intel Galileo foi usada como o principal elemento do sistema. A placa é baseada na CPU Intel Quark SoC x 1000 de 32 bits com uma frequência de clock de 400 MHz. O software utilizado foi o Linux quark 3.19.8 yocto-padrão. A fonte de energia é uma bateria de 10400 mAh, capaz de fornecer ao Galileo até 15 horas de duração da bateria. Uma placa Intel Dual Band Wireless-AC 7260 foi conectada à placa Galileo pela porta PCI Express, capaz de fornecer taxas de transferência de dados de até 867 Mbit / s. Ele funciona em vários padrões de Wi-Fi (802.11a / b / g / n / ac). Duas antenas externas com ganho de 5 dBi foram conectadas ao cartão. O peso total da placa Galileo, a bateria e toda a parte da antena foi de 340 gramas.
A primeira etapa do experimento foi estudar as capacidades teóricas de cobrir um drone. O cálculo foi realizado usando os modelos de propagação de rádio: “Free Space” e o modelo “Wireless Initiative New Radio” –WINNER D1.
Usando esses modelos, foram calculados os intervalos máximos estimados de propagação para o uplink e o downlink de várias versões do Wi-Fi. Além disso, medimos o desempenho da placa Galileo como um nó intermediário de uma rede Wi-Fi.
O experimento foi baseado em dois modos de operação de pontos de acesso sem fio. O primeiro - "Infraestrutura" - é implementado na maioria das redes Wi-Fi comerciais. Nesse modo, o ponto de acesso é o nó de comunicação central que conecta os dispositivos na rede e serve como gateway para a Internet. Nesse modo, o ponto de acesso cuida de todas as tarefas de gerenciamento de rede.
O segundo modo é Ad-Hoc. Não é menos comum e é uma rede em malha, onde nenhum dos pontos de acesso é central. Todos os nós são iguais e cada um assume as tarefas de um host ou roteador. Os nós Ad-Hoc podem se mover para formar a chamada rede móvel (NET Ad-hoc móvel - MANET). A vantagem desse modo é que a conexão entre nós pode ser alterada dinamicamente ao mover dispositivos. Mas a operação efetiva de tal rede pode depender muito dos algoritmos de roteamento responsáveis pela entrega de um pacote entre os nós da rede. Devido à natureza dinâmica da topologia de rede, o "custo" do caminho entre os nós deve ser recalculado periodicamente para encontrar os melhores caminhos.
Para testes, dois dispositivos adicionais foram conectados à rede. Os nós da rede eram dois laptops com Linux Ubuntu OS e cartão Wi-Fi IEEE 802.11 a / b / g / n. Um laptop com uma placa sem fio Intel Centrino Advance-N 6230 foi instalado no lado receptor e um laptop com uma placa Intel Dual Band 3160 foi instalada no outro lado.A placa Intel Galileo, que funciona no modo AP (modo de infra-estrutura) ou como uma das nós intermediários (Ad-Hoc) entre o transmissor e o receptor. No último dispositivo, foi utilizado o protocolo de roteamento BATMAN, que se provou bem. As métricas de rede foram obtidas usando o iPerf3. Neste experimento, foi utilizada a transmissão com velocidade constante entre os nós da rede, com os seguintes parâmetros: duração da transmissão - 30 seg; taxa de transferência: 1, 3, 5, 7, 9, 11 Mbps; tamanho do pacote: 512 e 1024 bytes.
Os parâmetros de uma rede aérea real foram medidos de acordo com o seguinte esquema:
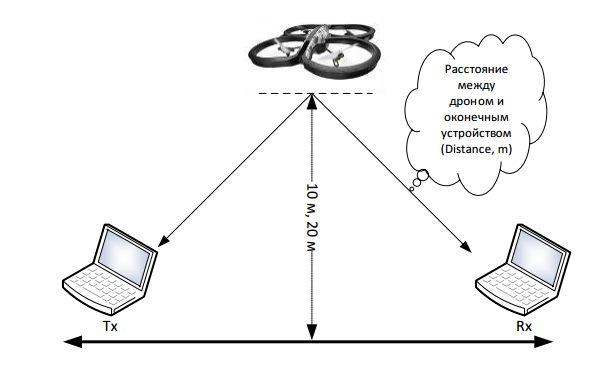
Os dois terminais foram se afastando gradualmente ao longo do eixo X. Nos pontos, a largura de banda da rede foi medida usando um analisador de rede iPerf3 e o nível máximo de sinal foi medido usando um analisador de espectro Rohde & Schwarz FSH3. O quadcopter pendia a uma altura de 10 e 20 metros, na qual foram feitas medições. Então o drone olhou:

Raio de ação
Como observamos no experimento, o alcance da comunicação foi medido e a cobertura calculada de acordo com os modelos de propagação de ondas de rádio “Espaço Livre” e o modelo WINNER D1. A fórmula de Friis é usada quando é necessário calcular a duração do sinal de rádio entre o transmissor e os receptores na ausência de obstáculos entre eles.
Este modelo é usado apenas ao calcular campos na zona remota; o cálculo é realizado de acordo com a fórmula:

O WINNER D1 é um modelo estocástico. Ele leva em consideração as perdas no canal sem fio. É determinado pela fórmula:

Nele, as variáveis de letra indefinidas têm os seguintes valores A = 21,5, B = 44,2 e C = 20.
Nos cálculos, a potência do transmissor para Uplink e Downlink foi assumida como 20 dBm (100 mW). O cálculo do alcance da comunicação foi feito para diferentes versões dos padrões IEEE 802.11. A tabela abaixo mostra os resultados do cálculo para o downlink (Downlink) e o uplink (Uplink). Nos cálculos, assumiu-se que o UAV está a uma altitude de 10 m.
Em um experimento real, o nível do sinal recebido foi estimado. A figura abaixo mostra o nível do sinal, dependendo da distância do modo de operação da infraestrutura (esquerda) e do modo Ad-hoc (direita) quando a aeronave está operando a uma altitude de 10 metros.

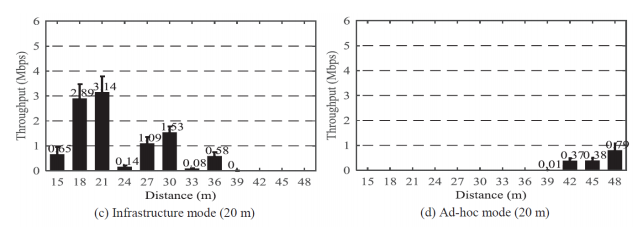
Os mesmos dados experimentais, exceto para a operação do drone a uma altura de 20 metros:
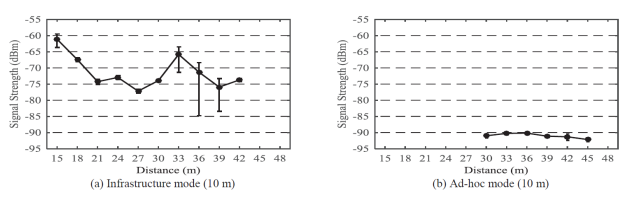
Os resultados mostram uma diferença notável entre os valores teóricos e práticos. Eles são causados por muitos fatores adicionais. No entanto, em geral, o nível do sinal recebido é muito superior ao sinal recebido no Ad-hoc. As figuras b e d mostram menos pontos de controle medidos, uma vez que apenas foram registradas as medidas obtidas quando o UAV operava como um ponto intermediário entre dois dispositivos terminais. Os resultados obtidos ao conectar diretamente o transmissor e o receptor do laptop não foram levados em consideração. Em outras palavras, quando a distância entre os pontos de extremidade era inferior a 60 metros (para uma altura do drone de 10 metros) ou 80 metros (para uma altura de 20 metros), o quadcopter não agia como um dispositivo intermediário no modo Ad-hoc.
Taxa de dados
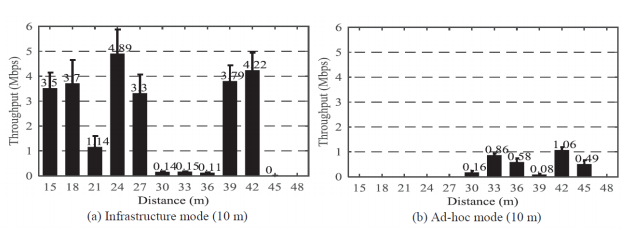
Para avaliar o desempenho do modo de operação de infra-estrutura e do modo Ad-hoc em termos de taxa de transferência máxima, o iPerf foi usado para executar pacotes entre os pontos de extremidade. As primeiras medições foram realizadas em condições de laboratório. Velocidade medida em vários modos de operação e pacotes de 512 e 1024 bytes.
As seguintes medições foram realizadas em condições reais. A velocidade da infraestrutura é superior à velocidade da rede Ad-hoc.
Para o modo de operação de infra-estrutura (à esquerda) e modo Ad-hoc (à direita) ao operar o drone a uma altura de 10 metros:
Os mesmos dados experimentais, exceto para a operação do drone a uma altura de 20 metros:
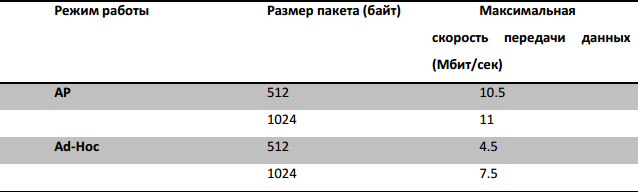
A taxa máxima de transferência de dados Wi-F varia de acordo com a versão do padrão 802.11. É determinado principalmente por métodos de modulação, largura de canal, número de fluxos espaciais, métodos de codificação e espectro de dispersão.
As velocidades máximas alcançáveis para a experiência em questão são fornecidas abaixo:
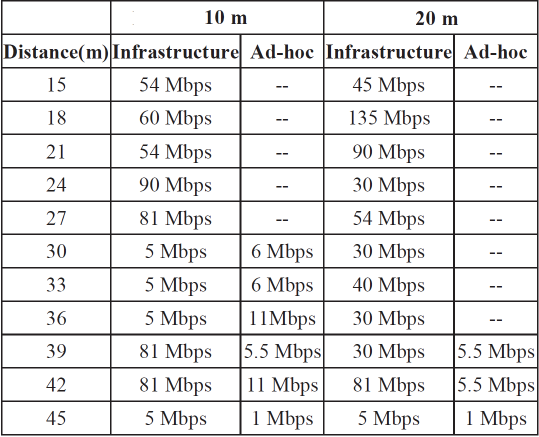
Aumentar a distância afeta a qualidade da comunicação. Por sua vez, isso força as placas de rede a recorrer a métodos de modulação mais conservadores e a reduzir as taxas de transferência de dados. No modo de infraestrutura, é possível suportar velocidades de transmissão mais altas.
Acima, durante os experimentos, foi mostrado claramente quais oportunidades se abrem ao usar quadrocopters para verificar redes mesh sem fio configuradas automaticamente. Com o desenvolvimento de tecnologias de comunicação e veículos aéreos não tripulados, haverá muitas vezes mais oportunidades para o desenvolvimento dessa maneira de construir uma rede