 Carcraft, software para construir um mundo virtual
Carcraft, software para construir um mundo virtualNo canto do campus da Alphabet, há uma equipe trabalhando em software que pode ser a chave para a criação de robomobiles. Nem um único jornalista o viu antes. Eles chamam de Carcraft, após o popular jogo World of Warcraft.
O criador do software, um jovem engenheiro com cabelos desgrenhados e rosto de menino, James Stout, está sentado ao meu lado em um espaço de escritório aberto, onde o silêncio reina e todo mundo usa fones de ouvido. A tela mostra uma seção de uma estrada virtual com um movimento circular. Não há nada para chamar a atenção - uma imagem simples de várias linhas e um fundo com texturas de estrada. Vemos um carro robótico Chrysler Pacifica de resolução média e um wireframe simples que representa outro veículo.
Há alguns meses, a equipe de desenvolvimento encontrou um movimento circular no Texas. A velocidade e a complexidade da situação da estrada colocaram o carro em uma posição difícil; portanto, a equipe decidiu construir um pedaço da estrada com a mesma configuração no local de teste. E eu já estou olhando para a terceira etapa do processo de treinamento: digitalizar a direção real. Aqui, a única manobra do motorista do mundo real - por exemplo, um carro que corta você em um movimento circular - pode ser transformada em milhares de cenários simulados que sondam os limites das capacidades de um carro.
Tais cenários formam a base de uma poderosa ferramenta de simulação. "A maior parte do trabalho sobre novos recursos é motivada pelo que vimos nas simulações", diz Stout. Essa ferramenta acelerou o desenvolvimento de veículos robóticos na Waymo, criada pela Alphabet (girlly Google) a partir de sua unidade de pesquisa X em dezembro de 2016.
Se a Waymo puder criar carros totalmente autônomos nos próximos anos, o Carcraft deve ser lembrado como um mundo virtual que desempenhou um papel significativo na mudança do mundo real no qual foi criado.
Inicialmente, ele foi projetado para percorrer as cenas encontradas pelos carros quando se viaja em vias públicas. Agora, o Carcraft e, em geral, todas as simulações, desempenham um papel crescente no desenvolvimento de veículos robóticos.
A cada momento, cerca de 25.000 robomobiles virtuais produzem versões totalmente modeladas de Austin, Mountain View e Phoenix, além de várias pistas de teste. Waymo pode reproduzir uma simulação de uma viagem por uma estrada particularmente difícil centenas de milhares de vezes por dia. No total, no mundo virtual, os carros percorrem 8 milhões de milhas por dia. Em 2016, eles viajaram 2,5 bilhões de milhas virtuais, em comparação com apenas 3 milhões de milhas percorridas por protótipos reais do Google em estradas reais. E, o mais importante, as milhas virtuais se concentram no que os funcionários da Waymo chamam de estradas "interessantes" onde os carros podem aprender algo novo. Não são apenas milhas chatas na estrada a caminho do trabalho.
As simulações fazem parte do intrincado processo desenvolvido pela Waymo. Eles ligaram firmemente os milhões de quilômetros percorridos por seus carros no DOP com o programa de "inspeção estrutural" que passam na base secreta de Zamok, no Vale Central.
Até agora, Waymo não revelou seu sistema para o mundo. As milhas em estradas regulares mostram onde seus carros precisam de prática extra. Eles constroem estradas com a configuração necessária no castelo, o que lhes permite jogar milhares de cenários diferentes no local. E em qualquer um dos dois tipos de verificação, no mundo real, as máquinas coletam dados suficientes para recriar completamente a situação em formato digital a qualquer momento. Nesse espaço virtual, você pode se libertar das limitações da vida real, criar milhares de opções para qualquer cenário e fazer o carro passar por todas elas. Para melhorar o software que dirige o carro, ele é baixado de volta nos carros, que depois dirigem nas estradas por mais tempo e de complexidade ainda maior, e o ciclo se repete.
Para chegar ao castelo, da Baía de São Francisco, você precisa ir para o leste, depois para o sul na 99ª e depois para a rodovia Central Valley, indo para o sul até Fresno. Os campos de milho são adjacentes aos subúrbios em crescimento; o horizonte desaparece atrás da névoa agrícola. É 30 graus mais quente que São Francisco, e a superfície é tão plana que as encostas desse "mar terrestre", como
John McPhee o chamou, só podem ser medidas com lasers. Você está se mudando para perto da pequena cidade de Etwater, onde existia a Base da Força Aérea de Castle, onde 6.000 pessoas serviram ao programa B-52. Agora, está localizado na fronteira norte da pequena cidade de Merced, na qual o desemprego na década de 2010 atingiu 20%, e mesmo agora raramente está abaixo de 10%. 40% da população fala espanhol. Atravessamos a ferrovia e entramos no território da antiga base de 650 hectares, que agora abriga todo tipo de coisa, desde o departamento de controle da vida selvagem até a prisão estadual.
Meu navegador no telefone não me levou a um endereço específico, mas a coordenadas de GPS. Percorremos uma cerca verde alta e opaca até o Google Maps dizer que é hora de parar. Nada indica a presença de portões. Tudo parece outra seção da cerca, mas meu representante anfitrião parece confiante. De repente, na abertura cada vez maior entre o portão e a cerca, um guarda aparece e começa a verificar nossos documentos.
 A cerca
A cercaA cerca se abriu e entramos em um movimentado campus. Jovens de bermuda e chapéu correm de um lado para o outro. Você pode ver carros residenciais, garagens de cúpula e no estacionamento próximo ao prédio principal - robomobiles. Aqui estão vários tipos de robomobiles - modelos Lexus que os residentes dos EUA podem encontrar na DOP, Prius, aposentados e nas novas vans Chrysler Pacifica.
Robomobiles são fáceis de distinguir. Eles são cravejados com sensores. Mais do que outros, são emitidos scanners a laser (lidares) no telhado. Mas a Pacifica também possui pequenos lidares do tamanho de latas de cerveja girando em torno de espelhos laterais. Na parte traseira, eles estão equipados com radares semelhantes aos ouvidos de Shrek.
Quando você liga os sensores da máquina, mesmo que ela não se mova, o lidar rotativo emite um som estranho. Algo entre o uivo e o zumbido, esse som é desagradável porque me parece uma novidade e meus ouvidos não conseguem filtrá-lo junto com os outros sons dos carros com os quais cresci.
Um carro ainda mais interessante está estacionado no edifício principal. Os sinais X são impressos em todo o corpo com fita vermelha.Este é um carro de quarto nível. Níveis são designações desenvolvidas pela comunidade de engenheiros de automóveis que descrevem o grau de autonomia de um robomóvel. Os carros nas estradas de que ouvimos falar estão no primeiro ou no segundo nível - ou seja, eles podem fazer um controle de cruzeiro "inteligente" na estrada. Mas o carro com o Xs vermelho é um animal completamente diferente. Não é apenas completamente autônomo, a pessoa dentro dele simplesmente não será capaz de dirigi-lo - portanto, eles não querem misturá-lo com outras máquinas.
Dirigimos até o estacionamento, e em toda parte os sinais do projeto de Manhattan, um posto avançado científico e uma startup de tecnologia estão por toda parte. No prédio principal, um carro móvel do tamanho de uma sala de aula, conheço a força motriz de todo esse lugar notável. O nome dela é Stef Villegas.
Ela está vestida com uma blusa branca longa e justa, com gola, jeans terrivelmente esfarrapados e tênis de malha cinza - tudo está terrivelmente na moda, como segue uma ex-funcionária da boutique Azalea, de onde se transferiu para o Google. Ela cresceu em um subúrbio de East Bay, no outro lado das colinas de Berkeley, e se formou em arte na Universidade da Califórnia em Berkeley antes de ingressar no Programa de Desenvolvimento de Robomobile de 2011.
"Você dirigiu um carro?" Eu pergunto.
"Eu dirijo o tempo todo", diz ela.
Ela passa inúmeras horas andando pelas estradas 101 e 280, indo de San Francisco a Mountain View. Como todos os motoristas, ela desenvolveu um senso de como os carros se comportam na estrada. E esse conhecimento acabou sendo muito importante para o programa de desenvolvimento de robomobiles. Eles desenvolveram uma idéia intuitiva do que pode ser difícil para as máquinas. “Verificando o software atualizado e tendo uma posição permanente na equipe, comecei a pensar em outras tarefas complexas que poderiam ser definidas para o sistema”, diz ela.
Por isso, Villegas e vários engenheiros começaram a criar e criar cenários raros de situações que permitiriam testar o novo comportamento das máquinas em um ambiente controlado. Eles começaram a ocupar o estacionamento em frente ao
Anfiteatro Costeiro , instalando-se nas entradas do seu povo, para que apenas os googlers permanecessem no estacionamento.
"Tudo começou lá", diz ela. "Eu e vários motoristas estávamos lá." Chegamos a um conjunto de idéias que queremos testar, carregamos tudo o que precisávamos em uma caminhonete e o dirigimos pelo estacionamento, fazendo verificações. ”
Foi assim que os primeiros testes estruturados surgiram no programa de desenvolvimento de robomóveis. Acontece que o mais difícil foi processar cenários não complicados inventados pelas pessoas, como "se houver um zumbi na estrada", mas simplesmente dirigir com confiança e confiabilidade em infinitas variantes do tráfego comum.
Villegas começou a colecionar adereços de tudo o que podia: manequins, cones, plantas artificiais, brinquedos, skates, triciclos, bonecas, bolas, todo tipo de coisa. Tudo isso entrou em um conjunto de adereços (como resultado, eles começaram a armazená-lo em uma barraca e agora - no castelo, em um armazém especial).
 Armazém necessário
Armazém necessárioMas houve problemas. Era necessário que o carro dirigisse mais rápido, reconhecesse semáforos e sinais. Os planos interferiam constantemente nos shows realizados no Anfiteatro. "Houve casos como: 'Bem, o Metallica está chegando, teremos que descartá-lo'", diz ela.
Eles precisavam de uma base secreta. O castelo era exatamente isso. Eles assinaram um contrato e começaram a construir sua cidade dos sonhos falsos. "Construímos ruas residenciais, rodovias, becos sem saída, estacionamentos e tudo mais, de modo a obter uma seleção representativa de lugares característicos pelos quais você pode viajar".
Vamos do escritório principal para o carro dela. Ela me dá um mapa quando fazemos uma viagem de campo. "É como a Disneylândia, para que você possa navegar", diz ela. O mapa é cuidadosamente projetado. Em um canto, há um distintivo no estilo de Las Vegas: "Bem-vindo ao castelo de contos de fadas na Califórnia". Diferentes áreas do campus ainda aderem às regras de nomenclatura. No que estamos dirigindo, cada estrada recebe o nome do famoso carro (
DeLorean ,
Bullitt ) ou em homenagem ao carro do primeiro parque baseado em Prius, que existia nos primeiros dias do programa (Barbaro).
Passamos pelos prédios rosados, o antigo quartel, um dos quais passou por reforma - os funcionários da Waymo descansam lá quando não conseguem voltar para a baía. Além desses, não há outros edifícios na área de teste. Esta é realmente uma cidade para os robomobiles: tudo o que importa está na calçada ou nas margens.
 "Cidade" no castelo
"Cidade" no casteloPara uma pessoa, tudo isso parece o nível de um jogo de computador sem personagens. É estranho que você se sinta ao sair das avenidas para ruas aparentemente residenciais com calçadas de cimento e trocas suburbanas que não têm prédios. Algumas seções da estrada periodicamente me parecem familiares.
Estamos nos aproximando de uma grande rotatória de duas faixas. No centro é um círculo com uma cerca branca. "Esta rotatória apareceu aqui especificamente depois de testarmos a rotunda de várias faixas em Austin, Texas", diz Villegas. - No começo, tínhamos apenas uma rotatória de pista única e decidimos: "Bem, ok, terminamos esta etapa". E então nos deparamos com uma banda múltipla e nos maravilhamos: 'Uau, um cavalo de uma cor diferente! Obrigado, Texas. Portanto, criamos essa beleza em nós mesmos. ”

Paramos e Villegas está considerando uma nova adição: duas faixas de carros e uma ciclovia passam por uma área de estacionamento paralela à beira do gramado. “Eu realmente queria criar uma rua com estacionamento paralelo aqui. Isso geralmente é encontrado nos subúrbios. Walnut Creek. Vista para a montanha. Palo Alto ”, ela diz. - As pessoas saem das lojas ou do estacionamento. As pessoas andam entre carros, atravessam a rua com as coisas nas mãos. ” A tira era um fragmento de sua memória, incorporada no asfalto e no concreto, que se transformaria em uma forma mais abstrata, para melhorar a capacidade do robô de processar o terreno familiar.
Ela me leva de volta ao escritório principal e subimos na van robótica, uma das Chrysler Pacificas. Nosso motorista é Brandon Kane. Seu assistente no banco do passageiro monitorará o comportamento do carro em um laptop usando o programa XView.
Um grupo de assistentes, a quem chamam de “raposas”, trabalha com eles - o apelido cresceu da palavra “artificial” [raposa - raposa, falso - artificial / aprox. transl.]. Eles dirigem carros, criam tráfego, jogam pedestres, andam de bicicleta, seguram placas de pare. Esses são os atores cujo público é o carro.
Nossa primeira verificação é simples passagem e corte, mas em alta velocidade. Nesse caso, são 70 km / h. Dirigimos pela estrada larga que eles chamavam de Autobahn.
Quando a raposa nos interrompe, a máquina Waymo freia e a equipe verifica um indicador-chave neste caso: a frenagem. Eles estão tentando criar situações nas quais o carro precisará frear bruscamente. Quão afiado? Em algum lugar entre "inferno, não tenho tempo para um semáforo" e "suei bruscamente, e o telefone voou do banco".
Vou dizer uma coisa estranha: essa não é minha primeira viagem a um robomóvel. No passado, eu dirigia duas vezes em dois robomobiles diferentes: a primeira vez em um Lexus SUV que me dirigia pelas ruas de Mountain View e a segunda em um pequeno carro do Google Firefly que montava no telhado de um prédio do Google. Foram viagens não dignas de nota, as quais, de fato, todo mundo aspira.
Agora tudo está diferente. Dois carros velozes, um dos quais deveria nos cortar bastante.
Está na hora de começar. Kane liga o carro e, após um sinal sonoro, o carro diz: "Automático". Outro carro se aproxima de nós e nos interrompe como motorista da Porsche, tentando ser o primeiro a dirigir até a saída. Freio forte, rápido e sem problemas. Estou impressionado.
Eles verificam os dados de frenagem e entendem que não estávamos freando o suficiente. Eu tenho que repetir. E de novo e de novo ... O segundo carro nos corta em diferentes ângulos, de uma maneira diferente. Eles chamam de "obter cobertura".
 Reconstrua em alta velocidade. Um dos carros é autônomo.
Reconstrua em alta velocidade. Um dos carros é autônomo.Estamos fazendo mais três verificações - reconstruindo em alta velocidade, encontrando um carro dirigindo para trás de um beco a três quadras de nós e uma parada suave ao ver uma bola de basquete que rolou para a estrada. Cada uma das manobras é impressionante à sua maneira, mas lembro-me do teste com a subcotação ao máximo.
Quando vamos para o reinício, Kane se move para o assento. "Você assistiu a orla do
Pacífico ?" Ele me pergunta - Filme Guillermo del Toro, onde as pessoas sincronizam ações com robôs gigantes para combater monstros. Estou tentando sincronizar ações com um robomóvel. Temos alguns pensamentos em comum.
Peço que ele explique o que ele quer dizer. "Estou tentando me adaptar à diferença de peso devido às pessoas presentes no carro", diz ele. - Passo muito tempo no carro e consigo sentir o que ela está fazendo - parece estranho, sim - com minha bunda. Eu meio que entendo o que ela quer fazer. "
Longe da neblina e do calor do castelo em Mountain View, a confortável sede do Google está localizada. Eu vim a eles para me encontrar com engenheiros que trabalham no X, que pode ser conhecido por você como Google X. Essa divisão da empresa está envolvida em projetos de pesquisa de longo prazo e alto risco. Em 2015, quando o Google reestruturou e organizou o conglomerado Alphabet, o X colocou o Google no título (o site é chamado X.company). Um ano depois disso, a X / Alphabet decidiu separar o programa de criação de robomobiles em uma empresa separada, como já aconteceu com vários outros projetos, e Waymo apareceu. Parece um primo do Google.
Portanto, embora os escritórios da Waymo ainda estejam dentro do "navio transportador", esses dois cliques já estão se separando lentamente e todos os funcionários da Waymo estão sentados separadamente.
O edifício X / Waymo é grande e leve. Os protótipos de drones do Project Wing estão por toda parte. Eu vejo uma pequena máquina de escrever Firefly construída pela empresa. "Há algo de bom no que você fez", Villegas me disse no castelo. "Mas não havia ar-condicionado neles, então não sinto falta deles."
Não muito longe da cafeteria, no canto de uma das alas do edifício, está o cluster de simulação de Waymo. Todo mundo parece ter Carcraft e XView nas telas. Um número notavelmente grande de polígonos contra um fundo escuro. São essas pessoas que criam os mundos virtuais nos quais os carros da Waymo dirigem.
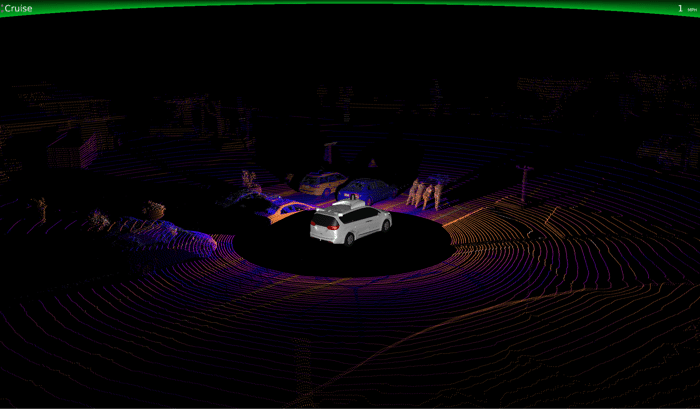 O que o scanner a laser Waymo viu quando quatro estavam empurrando um carro
O que o scanner a laser Waymo viu quando quatro estavam empurrando um carroEstou esperando James Stout, criador da Carcraft. Ele não tem a oportunidade de falar publicamente sobre seu projeto, então seu entusiasmo se manifesta. Carcraft é uma ideia dele.
“Eu estava procurando vagas e vi que a equipe de criação de robomobiles estava recrutando funcionários”, diz ele. "Não acredito que eles acabaram de publicar um emprego." Ele se juntou à equipe e imediatamente começou a criar um instrumento, graças ao qual hoje são percorridas 8 milhões de milhas virtuais por dia.
Inicialmente, a ferramenta era usada principalmente para monitorar o que seus carros fariam em situações difíceis nas quais motoristas ao vivo assumem o controle do carro. A partir desses momentos, eles começaram a criar scripts. "Logo ficou claro que essa era uma ferramenta muito útil e que muita coisa poderia ser criada com base", diz Stout. As possibilidades do Carcraft aumentaram e agora ele se encaixa em cidades inteiras, e o número de carros cresceu em um enorme parque virtual.Stout me apresenta Elena Kolarov, chefe do Departamento de Serviços de Script. Na frente dela estão dois monitores. À direita, o Xview mostra o que a máquina vê. A máquina usa câmeras, radar e lidar para identificar objetos no campo de visão - apresenta-os na forma de pequenas formas de estrutura de arame.Linhas verdes emergem das formas e mostram as possíveis maneiras pelas quais, de acordo com a máquina, os objetos podem se mover. Abaixo está um pedaço da imagem, que mostra que câmeras de carros comuns estão sendo filmadas. O Kolyarova pode ativar a exibição dos dados recebidos do lidar - eles são exibidos em pontos laranja e roxos.Estamos olhando para reproduzir o caso real de rearranjo em uma linha em um movimento circular no castelo. Kolyarova muda para o simulador. Tudo parece o mesmo, mas este não é um registro do evento, mas uma nova situação com a qual a máquina deve lidar. A única diferença é que, na parte superior da tela, há uma inscrição "simulação", em grandes letras vermelhas. Stout diz que teve que adicioná-lo porque as pessoas sempre confundiam simulação com realidade. Como é o movimento circular no castelo no XViewEles carregam uma situação diferente. Foi em Phoenix. Kolyarova amplia a imagem para mostrar seu modelo da cidade. Para todo o modelo, eles marcaram: "onde estão todas as faixas, em que faixas se transformam, onde estão os sinais de parada, onde estão os semáforos, as calçadas, onde estão os centros das faixas - tudo o que você precisa saber", diz Stout.
Como é o movimento circular no castelo no XViewEles carregam uma situação diferente. Foi em Phoenix. Kolyarova amplia a imagem para mostrar seu modelo da cidade. Para todo o modelo, eles marcaram: "onde estão todas as faixas, em que faixas se transformam, onde estão os sinais de parada, onde estão os semáforos, as calçadas, onde estão os centros das faixas - tudo o que você precisa saber", diz Stout.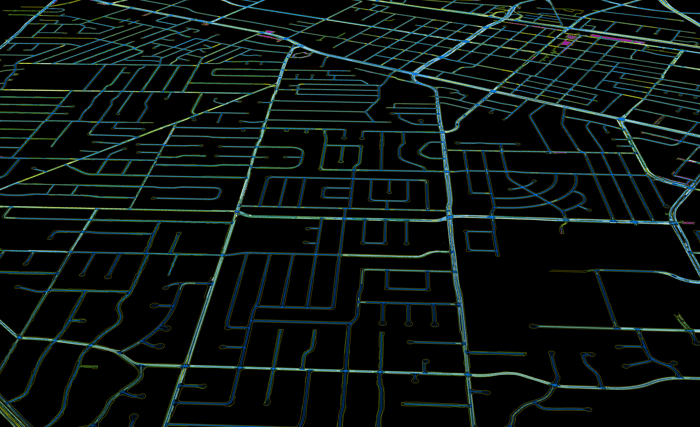 Agora estamos aumentando um cruzamento de quatro vias em algum lugar perto de Phoenix. Kolyarova começa a colocar carros artificiais, pedestres e ciclistas nele.
Agora estamos aumentando um cruzamento de quatro vias em algum lugar perto de Phoenix. Kolyarova começa a colocar carros artificiais, pedestres e ciclistas nele. Criando uma situação artificial em aeronavesPressionando uma tecla de atalho, os objetos começam a se mover. Os carros se comportam como carros, dirigem na faixa ou na curva. Os ciclistas se comportam de acordo. Sua lógica foi tirada dos dados obtidos dos milhões de milhas rodadas no DOP. E tudo isso é baseado em um mapa super detalhado do mundo e em modelos físicos de diferentes participantes da situação.
Criando uma situação artificial em aeronavesPressionando uma tecla de atalho, os objetos começam a se mover. Os carros se comportam como carros, dirigem na faixa ou na curva. Os ciclistas se comportam de acordo. Sua lógica foi tirada dos dados obtidos dos milhões de milhas rodadas no DOP. E tudo isso é baseado em um mapa super detalhado do mundo e em modelos físicos de diferentes participantes da situação. Não é de surpreender que o mais difícil seja simular o comportamento de outras pessoas. "Eu não me preocupo com você dirigindo, me preocupo com todo mundo na estrada."“Nossos carros veem o mundo, entendem o mundo. Eles entendem as intenções de todos os participantes em movimento no ambiente - carros, pedestres, ciclistas, motociclistas. Não basta rastrear um objeto no espaço. Você precisa entender o que ele faz ”, diz Dmitry Dolgov, vice-presidente de desenvolvimento da Waymo. - Esta é uma tarefa fundamental na criação de um robomóvel qualificado e seguro. "Essa simulação, uma compreensão do comportamento de outros participantes do movimento, é muito semelhante à modelagem de seu comportamento em uma simulação".Há uma diferença importante: no mundo real, você precisaria de dados novos e em tempo real para processar rapidamente e transformar o script em uma máquina compatível com a máquina, e depois navegá-la. Mas agora, depois de vários anos de trabalho neste projeto, eles estão confiantes de que são capazes de fazer isso, porque "realizaram várias verificações mostrando que somos capazes de reconhecer um grande número de opções de pedestres", diz Stout.Portanto, na maioria das situações, eles simplesmente pulam o estágio de reconhecimento de objetos. Em vez de alimentar os dados brutos do carro que eles deveriam reconhecer como pedestres, eles simplesmente dizem a ela: existe um pedestre.No cruzamento, Kolyarova complica a vida do carro. Ela pressiona V, uma tecla de atalho para o veículo, e um novo objeto aparece no Carcraft. Depois, com o mouse no menu à direita, ela seleciona meu favorito entre os tipos de carros: bird_squirrel.Vários objetos podem ser forçados a agir de acordo com a lógica pré-configurada no Waymo ou lógica programada no Carcraft, para que eles se movam de uma maneira muito específica - isso é necessário para testar diferentes tipos de comportamento. “Existe uma grande variedade entre o controle total da situação e o simples arranjo de objetos na cena, após o qual você pode simplesmente executá-los todos”, diz Stout.Conforme a base da situação está configurada, você pode começar a verificar todas as opções importantes contidas nela. Suponha que você queira verificar em um único cruzamento as diferentes seqüências de chegada de carros, pedestres e ciclistas, as diferentes horas em que eles param, a velocidade e qualquer outra coisa. Então você pode simplesmente definir intervalos razoáveis para os parâmetros correspondentes e perder todas as combinações dessa situação.Eles chamam de desfoque e, neste caso, 800 situações foram criadas automaticamente em nosso cruzamento. O resultado é um belo diagrama de renda - e todos os programadores podem verificá-lo e ver como diferentes combinações de variáveis afetam o caminho escolhido pelo robô.
Não é de surpreender que o mais difícil seja simular o comportamento de outras pessoas. "Eu não me preocupo com você dirigindo, me preocupo com todo mundo na estrada."“Nossos carros veem o mundo, entendem o mundo. Eles entendem as intenções de todos os participantes em movimento no ambiente - carros, pedestres, ciclistas, motociclistas. Não basta rastrear um objeto no espaço. Você precisa entender o que ele faz ”, diz Dmitry Dolgov, vice-presidente de desenvolvimento da Waymo. - Esta é uma tarefa fundamental na criação de um robomóvel qualificado e seguro. "Essa simulação, uma compreensão do comportamento de outros participantes do movimento, é muito semelhante à modelagem de seu comportamento em uma simulação".Há uma diferença importante: no mundo real, você precisaria de dados novos e em tempo real para processar rapidamente e transformar o script em uma máquina compatível com a máquina, e depois navegá-la. Mas agora, depois de vários anos de trabalho neste projeto, eles estão confiantes de que são capazes de fazer isso, porque "realizaram várias verificações mostrando que somos capazes de reconhecer um grande número de opções de pedestres", diz Stout.Portanto, na maioria das situações, eles simplesmente pulam o estágio de reconhecimento de objetos. Em vez de alimentar os dados brutos do carro que eles deveriam reconhecer como pedestres, eles simplesmente dizem a ela: existe um pedestre.No cruzamento, Kolyarova complica a vida do carro. Ela pressiona V, uma tecla de atalho para o veículo, e um novo objeto aparece no Carcraft. Depois, com o mouse no menu à direita, ela seleciona meu favorito entre os tipos de carros: bird_squirrel.Vários objetos podem ser forçados a agir de acordo com a lógica pré-configurada no Waymo ou lógica programada no Carcraft, para que eles se movam de uma maneira muito específica - isso é necessário para testar diferentes tipos de comportamento. “Existe uma grande variedade entre o controle total da situação e o simples arranjo de objetos na cena, após o qual você pode simplesmente executá-los todos”, diz Stout.Conforme a base da situação está configurada, você pode começar a verificar todas as opções importantes contidas nela. Suponha que você queira verificar em um único cruzamento as diferentes seqüências de chegada de carros, pedestres e ciclistas, as diferentes horas em que eles param, a velocidade e qualquer outra coisa. Então você pode simplesmente definir intervalos razoáveis para os parâmetros correspondentes e perder todas as combinações dessa situação.Eles chamam de desfoque e, neste caso, 800 situações foram criadas automaticamente em nosso cruzamento. O resultado é um belo diagrama de renda - e todos os programadores podem verificá-lo e ver como diferentes combinações de variáveis afetam o caminho escolhido pelo robô. Quadro eleitoralO desafio é analisar todas essas opções e simulações para encontrar dados interessantes que podem ajudar os programadores a melhorar seu programa de direção. O primeiro passo pode ser: o carro estava preso? Nesse caso, essa situação se torna interessante para trabalhar com ela.A animação abaixo mostra exatamente essa situação. A interseção complexa que existe na realidade em Mountain View. Virando à esquerda, o carro avistou uma ciclista que apareceu, e é por isso que ela parou na estrada. Os programadores pegaram essa classe de problemas e reprojetaram o software para que ele respondesse corretamente à situação. O vídeo mostra a situação real e, em seguida, sua simulação. Onde eles divergem, você pode ver que a máquina simulada continua a se mover e, em seguida, uma caixa pontilhada aparece com a inscrição "shadow_vehicle_pose". A caixa tracejada mostra o que aconteceu na realidade. Para os funcionários da Waymo, essa é a visualização mais clara do progresso.
Quadro eleitoralO desafio é analisar todas essas opções e simulações para encontrar dados interessantes que podem ajudar os programadores a melhorar seu programa de direção. O primeiro passo pode ser: o carro estava preso? Nesse caso, essa situação se torna interessante para trabalhar com ela.A animação abaixo mostra exatamente essa situação. A interseção complexa que existe na realidade em Mountain View. Virando à esquerda, o carro avistou uma ciclista que apareceu, e é por isso que ela parou na estrada. Os programadores pegaram essa classe de problemas e reprojetaram o software para que ele respondesse corretamente à situação. O vídeo mostra a situação real e, em seguida, sua simulação. Onde eles divergem, você pode ver que a máquina simulada continua a se mover e, em seguida, uma caixa pontilhada aparece com a inscrição "shadow_vehicle_pose". A caixa tracejada mostra o que aconteceu na realidade. Para os funcionários da Waymo, essa é a visualização mais clara do progresso. Mas eles precisam procurar não apenas os casos em que o carro está preso. Eles podem procurar situações em que o tempo gasto na solução foi muito longo ou a frenagem muito lenta. Tudo o que os programadores ajustam e estudam, eles simulam para encontrar problemas.Stout e o chefe do Departamento de Software da Dívida especificaram especificamente que a simulação tem três propriedades principais. Primeiramente, na simulação, você pode dirigir muito mais milhas do que seria possível com um parque físico; e a experiência é boa. Em segundo lugar, essas milhas se concentram em interações interessantes e complexas, e não apenas em milhas chatas. Terceiro, os ciclos de desenvolvimento de software podem ser muito mais rápidos."O ciclo de repetição é extremamente importante para nós, e o trabalho realizado na simulação nos permite compactá-lo drasticamente", Dolgov me disse. "Um ciclo que levaria semanas para trabalhar conosco pela primeira vez agora passa em minutos."E as manchas de óleo nas estradas? Pneus arrebentados, pássaros estranhos, buracos do tamanho de conchas e a loucura geral dos motoristas. Eles estão fingindo ser? A dívida estava confiante. Ele diz que eles poderiam fazer isso, mas "quanto você precisa para aumentar a precisão do simulador?"Os benefícios dos mundos virtuais da Carcraft não são imagens bonitas, ideais e fotorrealistas do mundo real. O benefício deles é que eles refletem o mundo real em aspectos importantes para os robomobiles e lhes permitem dirigir bilhões de milhas mais do que os exames físicos permitiriam. O software da máquina host não toma decisões, em um mundo semelhante ao real - para ele tudo é como se ele tomasse decisões no mundo real.E esse sistema funciona. O Departamento de Transportes da Califórnia exige que as empresas relatem quantos de seus robomobiles percorreram quilômetros em um ano e quantas vezes os motoristas precisam assumir o controle. Waymo não só dirigiu três ordens de grandeza a mais do que qualquer outra pessoa, mas o número de casos de transferência de controle está caindo rapidamente.Waymo percorreu 635.868 milhas autônomas de dezembro de 2015 a novembro de 2016. Nessas milhas, as transferências de controle ocorreram 124 vezes, em média uma vez a cada 5.000 milhas, ou 0,2 transferências por 1.000 milhas. No ano anterior, atingiram 424.331 milhas autônomas, tiveram 272 turnos, em média a cada 890 milhas, ou 0,8 turnos por 1000 milhas.Todo mundo, é claro, diz que esses números não podem ser comparados, mas sejamos realistas: esses são os melhores indicadores para a Califórnia. Todo o resto atingiu uma força de 32.000 quilômetros.A abordagem de Waymo não surpreende especialistas de terceiros. "Agora você pode medir a sofisticação da equipe que trabalha em autonomia - seja um drone ou um carro - com a seriedade com que levam a simulação", diz Chris Dixon, capital de risco da Andreessen Horowitz, que investiu na empresa de simulação Improbable, uma empresa de simulação. "E Waymo está no topo, eles são os mais sofisticados".Perguntei ao Diretor de Inovação da Allstate Insurance, Sunil Chintakindi, sobre a Waymo. "Sem uma infraestrutura de simulação confiável, você não pode criar máquinas com os mais altos níveis de autonomia", disse ele. "Eu nem falaria com alguém que pensa o contrário."Outros pesquisadores escolhem caminhos semelhantes. Huey Peng é diretor do Mcity, o laboratório de transporte autônomo e unificado da Universidade de Michigan. Peng diz que qualquer sistema que funcione para robomobiles será "uma combinação de simulação de 99%, verificações estruturais cuidadosamente projetadas e alguma quantidade de verificações nas estradas".Juntamente com o aluno de pós-graduação, eles propuseram um sistema para combinar milhas reais percorridas com uma simulação para acelerar significativamente as verificações. O sistema é um pouco como a implementação do Waymo. "Sugerimos remover todos os estágios chatos da direção e deixá-los interessantes", diz Peng. "Isso permitirá que você acelere centenas de vezes: mil milhas se transformam em um milhão".O escopo, organização e atividade do projeto Waymo são surpreendentes. Descrevi as verificações estruturais conduzidas pelo Google, Pengu, incluindo 20.000 situações que entraram na simulação a partir das verificações estruturais realizadas pela equipe no castelo. A princípio, ele não me ouviu e começou a dizer que "essas 2000 situações são uma figura impressionante". Corrigi: "Foram 20.000 simulações". Ele ficou calado. "20.000", ele disse, considerando. "Isso é impressionante."De fato, todas essas 20.000 situações representam uma pequena fração do número total de situações verificadas por Waymo. Estes são apenas os resultados do processamento de verificações estruturais. Eles têm ainda mais situações tiradas da condução em estradas reais e apenas de suas cabeças."Eles se dão muito bem", disse Peng. "Eles estão muito à frente de todos os outros no desenvolvimento do quarto nível", usando a redução de jargão para um carro totalmente autônomo.Peng expressou a posição das montadoras tradicionais. Ele disse que eles estão tentando alcançar algo completamente diferente. Eles não visam a plena autonomia, mas tentam adicionar tecnologias que ajudem a dirigir, "ganham algum dinheiro" e depois avançam em direção à total autonomia. O Waymo não pode ser comparado aos recursos e à liberdade corporativa de colocar um telêmetro a laser de US $ 70.000 em uma máquina com um fabricante como Chevy, cujos carros não deveriam custar mais de US $ 40.000 para serem vendidos no mercado.“GM, Ford, Toyota e o resto dizem: 'Deixe-me reduzir colisões e baixas e aumentar a segurança do consumidor em massa'. O objetivo deles é completamente diferente, diz Peng. "Precisamos pensar em milhões de carros, e não apenas alguns milhares."E Waymo enfrentou mais obstáculos na corrida por autonomia total do que costumava, por exemplo, Tesla. Chris Gerde é diretor do Stanford Automotive Research Center. ele disse ao meu colega que Waymo "tem uma compreensão muito melhor da profundidade dos problemas e quanto mais chegamos para resolvê-los." Quando perguntei a ele na semana passada se ele ainda acredita nisso, ele disse "muito mudou. ""Montadoras como Ford e GM exibiram seus carros e construíram seus conjuntos de dados rodoviários", diz ele. - A Tesla coletou uma enorme quantidade de dados do desenvolvimento do piloto automático, estudando como o sistema se comporta exatamente nas condições em que seus clientes se encontram. Sua capacidade de testar silenciosamente algoritmos e sua base de máquinas em rápido crescimento representam um incrível campo de testes. ”Gerde diz que, no mundo das simulações, ele viu vários concorrentes com programas bastante sérios. "Tenho certeza de que existem muitas possibilidades de simulação, mas já vi vários bons exemplos. Waymo não parece mais tão único. Eles realmente tiveram uma desvantagem, mas hoje existem muitos grupos enfrentando abordagens semelhantes. Então agora a questão é quem fará melhor. ”Isso não é apenas algum tipo de demonstração do funcionamento de uma rede neural que se parece com um cérebro. Este é um grande salto em frente no desenvolvimento da IA, mesmo para a empresa Alphabet, conhecida por suas políticas agressivas de IA. Este não é o Google Fotos, onde o erro não vale nada. Este é um sistema que irá viver e interagir completamente de forma independente com o mundo das pessoas. Ela entenderá nossas regras, comunicará seus desejos, ficará clara para nossos olhos e mentes.Waymo parece ter se afastado um pouco do trabalho com a pilotagem como uma habilidade técnica específica, e está passando a trabalhar com ela como uma forma de atividade social humana. O que significa dirigir "normalmente" e não apenas "legalmente"? Como ensinar essa IA?Acontece que, para criar essa IA, você não precisa apenas de uma quantidade enorme de dados e da arte dos programadores. Estas são condições necessárias, mas insuficientes. Uma parte disso é necessária para que as pessoas sincronizem com os carros, entendam o mundo como são. Os motoristas do castelo entendem o que significa ser uma dessas máquinas, ver e tomar decisões do jeito que são. Talvez isso funcione nos dois sentidos - quanto melhor as pessoas entendem máquinas, melhores máquinas entendem as pessoas.A memória da rotatória em Austin se torna parte do castelo, o conjunto de dados do carro robótico se torna a situação para a Carcraft, a rede de simulações se torna o novo software que finalmente retorna ao carro-robô físico que está indo para essa rotatória no Texas.Mesmo dentro da abstração poligonal da simulação usada pela IA para reconhecer o mundo, há traços de sonhos humanos, partes de memórias, sentimentos de motoristas. Esses componentes não são erros e nem pontos que precisam ser lavados, mas as partes necessárias de um sistema que pode revolucionar o transporte nas cidades e, inferno, em quase todos os lugares.
Mas eles precisam procurar não apenas os casos em que o carro está preso. Eles podem procurar situações em que o tempo gasto na solução foi muito longo ou a frenagem muito lenta. Tudo o que os programadores ajustam e estudam, eles simulam para encontrar problemas.Stout e o chefe do Departamento de Software da Dívida especificaram especificamente que a simulação tem três propriedades principais. Primeiramente, na simulação, você pode dirigir muito mais milhas do que seria possível com um parque físico; e a experiência é boa. Em segundo lugar, essas milhas se concentram em interações interessantes e complexas, e não apenas em milhas chatas. Terceiro, os ciclos de desenvolvimento de software podem ser muito mais rápidos."O ciclo de repetição é extremamente importante para nós, e o trabalho realizado na simulação nos permite compactá-lo drasticamente", Dolgov me disse. "Um ciclo que levaria semanas para trabalhar conosco pela primeira vez agora passa em minutos."E as manchas de óleo nas estradas? Pneus arrebentados, pássaros estranhos, buracos do tamanho de conchas e a loucura geral dos motoristas. Eles estão fingindo ser? A dívida estava confiante. Ele diz que eles poderiam fazer isso, mas "quanto você precisa para aumentar a precisão do simulador?"Os benefícios dos mundos virtuais da Carcraft não são imagens bonitas, ideais e fotorrealistas do mundo real. O benefício deles é que eles refletem o mundo real em aspectos importantes para os robomobiles e lhes permitem dirigir bilhões de milhas mais do que os exames físicos permitiriam. O software da máquina host não toma decisões, em um mundo semelhante ao real - para ele tudo é como se ele tomasse decisões no mundo real.E esse sistema funciona. O Departamento de Transportes da Califórnia exige que as empresas relatem quantos de seus robomobiles percorreram quilômetros em um ano e quantas vezes os motoristas precisam assumir o controle. Waymo não só dirigiu três ordens de grandeza a mais do que qualquer outra pessoa, mas o número de casos de transferência de controle está caindo rapidamente.Waymo percorreu 635.868 milhas autônomas de dezembro de 2015 a novembro de 2016. Nessas milhas, as transferências de controle ocorreram 124 vezes, em média uma vez a cada 5.000 milhas, ou 0,2 transferências por 1.000 milhas. No ano anterior, atingiram 424.331 milhas autônomas, tiveram 272 turnos, em média a cada 890 milhas, ou 0,8 turnos por 1000 milhas.Todo mundo, é claro, diz que esses números não podem ser comparados, mas sejamos realistas: esses são os melhores indicadores para a Califórnia. Todo o resto atingiu uma força de 32.000 quilômetros.A abordagem de Waymo não surpreende especialistas de terceiros. "Agora você pode medir a sofisticação da equipe que trabalha em autonomia - seja um drone ou um carro - com a seriedade com que levam a simulação", diz Chris Dixon, capital de risco da Andreessen Horowitz, que investiu na empresa de simulação Improbable, uma empresa de simulação. "E Waymo está no topo, eles são os mais sofisticados".Perguntei ao Diretor de Inovação da Allstate Insurance, Sunil Chintakindi, sobre a Waymo. "Sem uma infraestrutura de simulação confiável, você não pode criar máquinas com os mais altos níveis de autonomia", disse ele. "Eu nem falaria com alguém que pensa o contrário."Outros pesquisadores escolhem caminhos semelhantes. Huey Peng é diretor do Mcity, o laboratório de transporte autônomo e unificado da Universidade de Michigan. Peng diz que qualquer sistema que funcione para robomobiles será "uma combinação de simulação de 99%, verificações estruturais cuidadosamente projetadas e alguma quantidade de verificações nas estradas".Juntamente com o aluno de pós-graduação, eles propuseram um sistema para combinar milhas reais percorridas com uma simulação para acelerar significativamente as verificações. O sistema é um pouco como a implementação do Waymo. "Sugerimos remover todos os estágios chatos da direção e deixá-los interessantes", diz Peng. "Isso permitirá que você acelere centenas de vezes: mil milhas se transformam em um milhão".O escopo, organização e atividade do projeto Waymo são surpreendentes. Descrevi as verificações estruturais conduzidas pelo Google, Pengu, incluindo 20.000 situações que entraram na simulação a partir das verificações estruturais realizadas pela equipe no castelo. A princípio, ele não me ouviu e começou a dizer que "essas 2000 situações são uma figura impressionante". Corrigi: "Foram 20.000 simulações". Ele ficou calado. "20.000", ele disse, considerando. "Isso é impressionante."De fato, todas essas 20.000 situações representam uma pequena fração do número total de situações verificadas por Waymo. Estes são apenas os resultados do processamento de verificações estruturais. Eles têm ainda mais situações tiradas da condução em estradas reais e apenas de suas cabeças."Eles se dão muito bem", disse Peng. "Eles estão muito à frente de todos os outros no desenvolvimento do quarto nível", usando a redução de jargão para um carro totalmente autônomo.Peng expressou a posição das montadoras tradicionais. Ele disse que eles estão tentando alcançar algo completamente diferente. Eles não visam a plena autonomia, mas tentam adicionar tecnologias que ajudem a dirigir, "ganham algum dinheiro" e depois avançam em direção à total autonomia. O Waymo não pode ser comparado aos recursos e à liberdade corporativa de colocar um telêmetro a laser de US $ 70.000 em uma máquina com um fabricante como Chevy, cujos carros não deveriam custar mais de US $ 40.000 para serem vendidos no mercado.“GM, Ford, Toyota e o resto dizem: 'Deixe-me reduzir colisões e baixas e aumentar a segurança do consumidor em massa'. O objetivo deles é completamente diferente, diz Peng. "Precisamos pensar em milhões de carros, e não apenas alguns milhares."E Waymo enfrentou mais obstáculos na corrida por autonomia total do que costumava, por exemplo, Tesla. Chris Gerde é diretor do Stanford Automotive Research Center. ele disse ao meu colega que Waymo "tem uma compreensão muito melhor da profundidade dos problemas e quanto mais chegamos para resolvê-los." Quando perguntei a ele na semana passada se ele ainda acredita nisso, ele disse "muito mudou. ""Montadoras como Ford e GM exibiram seus carros e construíram seus conjuntos de dados rodoviários", diz ele. - A Tesla coletou uma enorme quantidade de dados do desenvolvimento do piloto automático, estudando como o sistema se comporta exatamente nas condições em que seus clientes se encontram. Sua capacidade de testar silenciosamente algoritmos e sua base de máquinas em rápido crescimento representam um incrível campo de testes. ”Gerde diz que, no mundo das simulações, ele viu vários concorrentes com programas bastante sérios. "Tenho certeza de que existem muitas possibilidades de simulação, mas já vi vários bons exemplos. Waymo não parece mais tão único. Eles realmente tiveram uma desvantagem, mas hoje existem muitos grupos enfrentando abordagens semelhantes. Então agora a questão é quem fará melhor. ”Isso não é apenas algum tipo de demonstração do funcionamento de uma rede neural que se parece com um cérebro. Este é um grande salto em frente no desenvolvimento da IA, mesmo para a empresa Alphabet, conhecida por suas políticas agressivas de IA. Este não é o Google Fotos, onde o erro não vale nada. Este é um sistema que irá viver e interagir completamente de forma independente com o mundo das pessoas. Ela entenderá nossas regras, comunicará seus desejos, ficará clara para nossos olhos e mentes.Waymo parece ter se afastado um pouco do trabalho com a pilotagem como uma habilidade técnica específica, e está passando a trabalhar com ela como uma forma de atividade social humana. O que significa dirigir "normalmente" e não apenas "legalmente"? Como ensinar essa IA?Acontece que, para criar essa IA, você não precisa apenas de uma quantidade enorme de dados e da arte dos programadores. Estas são condições necessárias, mas insuficientes. Uma parte disso é necessária para que as pessoas sincronizem com os carros, entendam o mundo como são. Os motoristas do castelo entendem o que significa ser uma dessas máquinas, ver e tomar decisões do jeito que são. Talvez isso funcione nos dois sentidos - quanto melhor as pessoas entendem máquinas, melhores máquinas entendem as pessoas.A memória da rotatória em Austin se torna parte do castelo, o conjunto de dados do carro robótico se torna a situação para a Carcraft, a rede de simulações se torna o novo software que finalmente retorna ao carro-robô físico que está indo para essa rotatória no Texas.Mesmo dentro da abstração poligonal da simulação usada pela IA para reconhecer o mundo, há traços de sonhos humanos, partes de memórias, sentimentos de motoristas. Esses componentes não são erros e nem pontos que precisam ser lavados, mas as partes necessárias de um sistema que pode revolucionar o transporte nas cidades e, inferno, em quase todos os lugares.