
Olá, querida comunidade GeekTimes! Após meu longo silêncio, quero apresentar meu novo projeto. OPENTadpole é um aplicativo que consiste em um editor completo do sistema nervoso do girino do sapo e emulação física do corpo e do meio ambiente do girino. A capacidade de criar, configurar e editar a conexão do animal do zero e ver imediatamente como sua criação se reflete em seu comportamento.
Há cerca de um ano, uma série de artigos dedicados ao desenvolvimento de um simulador do sistema nervoso foi concluída, e o aplicativo desenvolvido por mim apresentava várias deficiências, assim como o código amador não permitia expandir e desenvolver a funcionalidade do aplicativo. Vale ressaltar que o aplicativo desenvolvido na época me permitiu demonstrar e elaborar os mecanismos básicos e a plataforma teórica do sistema de modelagem. Foi decidido reprocessar o código, a partir de uma posição de uma representação mais precisa, quais entidades e suas funcionalidades estarão presentes na versão final do aplicativo.
Primeiramente, usei meu mecanismo de jogo Unity favorito para o meu desenvolvimento e conectei a essência do elemento neural ao GameObject, sua lógica foi executada em corotinas que, quando a rede aumentou, se tornaram um problema fatal, o aplicativo afundou muito devido à estreita conexão da lógica da rede neural com o GameObject. parte gráfica do aplicativo. Obviamente, a solução foi separar a parte gráfica da lógica do sistema, a lógica deve ser executada em threads separados, e a parte gráfica só poderá acessar periodicamente os elementos de rede para exibir as alterações que estão ocorrendo. Essa abordagem fornece outra vantagem, a capacidade de não apenas monitorar os processos que estão ocorrendo na rede, mas de interagir com os resultados de seus cálculos, por exemplo, imergir a rede em um determinado agente virtual e observar como esse agente interage com o ambiente externo.
Em segundo lugar, foi decidido revisar o conceito do editor, apesar do 3D ser considerado um método de visualização mais eficaz, decidi mudar para o 2D. Eu costumava pensar que um certo significado-chave está na organização tridimensional do sistema nervoso e, temendo perder algo de vista, lutei por uma organização tridimensional do editor e do sistema. Mas agora, entendo que será suficiente aplicar o construtivo de um editor plano com níveis ou camadas, porque até o córtex cerebral possui uma estrutura em camadas, e trabalhar no plano permite que o usuário final navegue e organize mais convenientemente seu trabalho com o editor, especialmente quando se trata de grandes dimensões. matrizes de elementos.
Considerando que trabalho sozinho, e o desenvolvimento de aplicativos no campo da cibernética não é minha atividade principal, o desenvolvimento começou a ir devagar e, ao mesmo tempo, eu queria demonstrar como minhas idéias podem ser aplicadas a animais com um sistema nervoso simples, como um molusco, um verme ou algum tipo de inseto. Gosto muito do projeto OpenWorm para criar um modelo de computador do worm Caenorhabditis elegans, cujo sistema nervoso é composto por 302 neurônios e cuja conexão foi completamente composta. O projeto consiste em duas partes: modelar as propriedades elétricas neurais do sistema nervoso do verme e modelar as propriedades mecânicas de seu corpo durante a natação. Eu apliquei esse conceito ao meu projeto, uma referência à qual pode ser vista no nome do projeto. A escolha de um animal simulado foi influenciada pela gravação do discurso de Roman Matveevich Borisyuk, no qual ele falou sobre um projeto para simular o sistema nervoso de um girino de dois dias. Inspirado por este vídeo, eu decidi fazer algumas ramificações no trabalho em um simulador do sistema nervoso, chamado OPENTadpole.
Uma plataforma teórica que pretenda explicar os mecanismos do sistema nervoso deve funcionar tanto na escala do sistema nervoso simples quanto na escala do sistema nervoso que desempenha funções cognitivas. Muitas vezes, você pode encontrar comentários dirigidos aos autores de novas teorias sobre o funcionamento do cérebro que, antes de modelar redes neurais em larga escala, pode valer a pena mostrar como suas teorias podem ser aplicadas a animais simples e seus sistemas nervosos. Pode-se ouvir uma resposta evasiva a esses comentários de que as propriedades dos neurossistemas se manifestam apenas em uma escala gigantesca e muito grande, e a vida das criaturas primitivas não é significativa quando se trata de resolver problemas cognitivos. Tais injustiças e ilusões se tornaram para mim mais um motivo para se concentrar na vida e no comportamento do girino de dois dias.
Animais cibernéticos com o sistema nervoso
Obviamente, o Homem já criou muitos mecanismos cibernéticos que imitam certos aspectos do comportamento animal, por exemplo, os patos mecânicos de Vaucanson, que não apenas agitavam suas asas, bicavam ração derramada, mas também tinham uma aparência do sistema digestivo com todos os processos associados. Mas animais artificiais com um sistema nervoso semelhante ao seu homólogo biológico são bastante raros. Vamos fazer uma breve visão geral do mundo dos animais cibernéticos, para que fique claro para você de onde veio tanta audácia, a fim de chamar seu girino o primeiro animal cibernético com sistema nervoso artificial.
E começaremos não com um animal, mas com uma pessoa lendária - Henry Markram. Henry Markam é um cientista, conhecido por muitos como pioneiro no estudo das conexões sinápticas; ele foi um dos primeiros a começar a estudar sistematicamente uma versão consistente da regra de Hebb. Mas Henry Markram ganhou fama real como o criador da simulação de cérebro mais cara do mundo. À disposição do cientista e de seus colegas não está apenas o maior financiamento já alocado para tais propósitos, mas também os recursos de computação mais poderosos do
supercomputador Blue Gene da IBM. O nome do computador deu o primeiro nome ao projeto: “Blue Brain Project”, em 2013 foi renomeado como “The Human Brain Project”. Apesar do nome do projeto agora se referir ao cérebro humano, o trabalho está em andamento em um modelo de um pequeno fragmento do córtex do cérebro do rato. Os gerentes de projeto têm grandes planos, começando com um pequeno fragmento do cérebro do mouse para alcançar um modelo completo do cérebro humano. Em 2009, Markam, o curador do projeto, prometeu que dez anos depois uma simulação por computador de todo o cérebro humano apareceria. Muitos consideram Henry Markram um charlatão; de fato, se você ouvir seus discursos, eles se concentrarão mais em investidores ricos, pouco versados em neurociência, do que em seus colegas cientistas.
Em toda a história do projeto, além de belos materiais gráficos e guirlandas de neurônios, há um estudo praticamente útil. Foram criados cerca de vinte modelos 3D de certos tipos de neurônios que repetiam completamente a topologia de neurônios reais, levando em consideração todas as curvas e ramificações dos dendritos. Em seguida, uma pequena região do córtex foi configurada na qual os modelos de neurônios preparados estavam localizados, de acordo com certas regras, mas os modelos de neurônios foram escolhidos aleatoriamente e, em seguida, foram coletadas estatísticas a partir do modelo obtido: onde os dendritos se cruzam, a que distância do corpo celular, que tipo de contatos.
As estatísticas obtidas foram comparadas com estatísticas semelhantes, mas obtidas do sistema nervoso biológico e obtiveram resultados muito importantes: a formação de 80% das conexões sinápticas no córtex está sujeita ao acaso. I.e. onde há dendritos, axônios, colaterais em crescimento livre, uma sinapse pode se formar, e não marcadores químicos. Certamente, em alguns casos, a seletividade da formação de sinapses não é excluída, e também é impossível tirar uma conclusão sobre a aleatoriedade da qualidade das conexões. Uma sinapse pode se formar por acaso durante o crescimento de um neurônio, mas sua força (peso) pode ser determinada pela atividade vital do sistema nervoso e do animal.
Embora não seja possível falar sobre um mouse virtual cibernético no âmbito do Projeto Cérebro Humano, um modelo em escala real do cérebro do mouse ainda está longe. Devido aos recursos da IBM, outro pesquisador Dharmendra Mohda em 2009 anunciou o lançamento de um projeto para criar uma simulação digital de um cérebro felino. Essa declaração causou muita indignação na Markram, o que resultou na forma de uma carta aberta e irritada ao tecnólogo-chefe da IBM. Ninguém gosta de competição, mas preferimos vê-lo na luta de gatos e ratos virtuais do que em atrair a atenção dos chefes da IBM, chefes de imitações caras. Depois de tantos anos, mudanças significativas e desenvolvimento no campo das imitações do cérebro de mamíferos não ocorreram.
O OpenWorm é um projeto muito famoso para criar um modelo de simulação de um nemátodo (lombriga) da espécie Caenorhabditis elegans; esse verme é notável pelo fato de ser a única espécie animal para a qual uma conexão completa de seu sistema nervoso é composta por 302 neurônios e cerca de 7.000 conexões sinápticas. Mesmo para um sistema nervoso tão pequeno como c. os elegans que se conectaram acabaram sendo um trabalho titânico. Primeiramente, o verme foi submetido a um procedimento complexo - microscopia serial, criando uma série de fotografias de seções transversais do corpo. Era necessário fazer seções muito finas, de poucos mícrons, e depois usar um microscópio eletrônico para criar imagens de alta resolução. Com um verme adulto de 1 a 2 mm de comprimento, isso se mostrou uma tarefa difícil, o atlas disponível de fotografias é composto por três vermes, uma vez que o sistema nervoso c. elegans tem incrível estabilidade e repetibilidade. Em segundo lugar, foram necessários mais de sete anos de estudo minucioso das imagens, a equipe de cientistas, para compilar um mapa das conexões do sistema nervoso; ainda estão sendo feitos ajustes no banco de dados resultante.
Infelizmente, é impossível determinar o tipo e a força das conexões sinápticas na fotografia; como resultado, temos uma descrição das conexões sem nenhuma idéia de sua finalidade funcional.
O próximo passo para entender a natureza do sistema nervoso c. elegans se torna uma tentativa de criar uma simulação de computador de um worm. O modelo digital é conveniente, pois o pesquisador pode alterar e selecionar as configurações de seus elementos, para que o trabalho de todo o modelo seja comparável a um análogo biológico, o que possibilita identificar algumas leis da organização e operação do sistema nervoso de um organismo vivo usando seleção empírica. Obviamente, sem uma teoria geral do sistema nervoso, sem uma plataforma teórica, essa busca por leis é uma tarefa muito difícil, cuja solução pode naturalmente se arrastar.
O projeto ganhou fama particular durante o
kickstarter da empresa em 2014 . A comunidade OpenWorm é muito proveitosa:
é criado um
atlas tridimensional do nematóide , no qual o sistema nervoso é trabalhado em detalhes - cada neurônio é designado; sistema criado e amplamente desenvolvido de modelagem e visualização de
geppetto ; simulação das propriedades mecânicas do corpo do verme e do ambiente externo - Sibernetic, no qual nossos compatriotas estão trabalhando. Mas nemátodos cibernéticos em movimento livre, controlados pelo sistema nervoso, ainda não apareceram. Alguns reflexos simples relacionados à locomoção (movimento) e retração ao tocar a frente do corpo são modelados, mas a maioria dos circuitos nervosos e o comportamento do nematóide associado a eles permanecem inexplorados.
Um dos mais recentes vídeos sibernéticos do canal de Andrei Palyanov, o nematóide nadando em dois ambientes diferentes, o controle é realizado usando sinais periódicos simples, sem a participação de neurônios virtuais.
O próximo projeto me impressionou bastante, foi depois de assistir ao próximo vídeo com um discurso de Roman Matveevich Borisyuk que decidi escolher um girino como animal modelo em meu projeto.
O projeto pouco conhecido
tadpoles.org.uk explica modestamente alguns dos princípios e leis fundamentais da organização do sistema nervoso. Os cientistas criaram um modelo para o desenvolvimento do sistema nervoso, sua formação no período inicial de desenvolvimento do animal. Primeiro, é gerado um modelo: dendritos e axônios crescem a partir de neurônios de acordo com certas regras que levam em conta alguns parâmetros do corpo do girino com um certo grau de probabilidade de afetar a direção do crescimento dos processos e, em seguida, sinapses se formam nos pontos de contato entre dendritos e axônios de diferentes células. No final, o modelo pode ser ativado e demonstrará atividade semelhante à atividade do sistema nervoso do girino vivo na parte responsável pela natação.
Acontece que, para que o sistema nervoso se forme com todos os reflexos e mecanismos congênitos, é necessário que instruções simples sejam seguidas pelas células nervosas. Dependendo da sua localização e afiliação a determinados aglomerados de células - os gânglios, a célula deve crescer seus dendritos e axônios em determinadas direções, bem como formar contatos sinóticos com as células e seus processos localizados a determinadas distâncias do corpo da célula, sem nenhuma seletividade. O erro resultante na estrutura da rede neural devido a desvios na direção do crescimento dos processos ao superar possíveis obstáculos é compensado pela presença excessiva de neurônios e processos.
Para o ato de nadar, a contração ondulatória dos músculos ao longo do corpo, o girino precisa de aproximadamente 1.500 neurônios, para um nematóide menor que trezentos. O girino do sapo é um animal mais complexo e evolutivamente desenvolvido, em comparação com a lombriga, e o aumento no número de neurônios aqui está conectado, não com a necessidade de aumentar o poder de computação, mas com a confiabilidade do sistema e a compensação pela imprecisão dos neurônios como elementos computacionais. Alguns pesquisadores atribuem as propriedades de computadores quânticos ou calculadoras sofisticadas a neurônios individuais, mas isso é fundamentalmente errado, um neurônio é, antes de tudo, uma célula biológica, com seu erro inerente no trabalho e na instabilidade. Portanto, não faz sentido gastar tempo reconstruindo todos os 86 bilhões de neurônios do cérebro humano; seria apropriado agrupar estruturalmente os neurônios em certos neuroelementos que executam tarefas funcionais atribuídas a grupos de neurônios.
O principal é a abordagem correta
Você pode gastar muito tempo, dinheiro e esforço na criação de modelos complexos de sistemas complexos sem obter resultados praticamente significativos se a base não for colocada em uma idéia precisa da operação de cada elemento do sistema e quais funções esses elementos executam em todo o sistema como um todo. Idealmente, você precisa conhecer o resultado do modelo antes de começar a recriá-lo. É isso que determina o sucesso na resolução de tarefas, e não a presença de um supercomputador e uma grande assistência financeira.
Agora muita atenção é dada às redes neurais, que demonstram alta eficiência e grandes benefícios práticos. Inicialmente, as redes neurais foram posicionadas como certos modelos de redes neurais biológicas, mas com o tempo e o desenvolvimento da neurobiologia, ficou claro que apenas o nome tem um comum entre o neurônio formal usado no SN e o biológico. As redes neurais modernas são uma poderosa ferramenta matemática para análise estatística. É esse posicionamento do NS em seu desenvolvimento que dará maior eficiência. Análise estatística e processamento de uma grande quantidade de dados, não um modelo do sistema nervoso. É possível que algum tipo de inteligência artificial apareça na plataforma NS, mas se nos esforçarmos para criar inteligência semelhante à humana, devemos prestar atenção às redes neurais biológicas.
As redes neurais já provaram sua grande eficácia na solução de certos problemas em comparação aos humanos, e é desejável que seu desenvolvimento continue. Como pesquisador do cérebro, eu confiaria mais em uma máquina acionada por uma rede neural bem desenvolvida do que em uma máquina acionada por um modelo virtual de tecido nervoso semelhante ao biológico. O fato é que os mecanismos do cérebro contêm inicialmente elementos de imprecisão e percepção limitada, que naturalmente levam a erros, mas, por outro lado, esses mesmos mecanismos oferecem grande potencial de criatividade e adaptação.
O modelo matemático dominante usado na criação de sistemas neurais biologicamente semelhantes é o modelo de Hodgkin-Huxley, descrito em 1952. De uma forma ou de outra, esse modelo é usado tanto no Projeto do Cérebro Humano, como no OpenWorm e no tadpoles.org.uk. O modelo de Hodgkin-Huxley é um sistema de equações que descreve as oscilações de carga que ocorrem na superfície de uma membrana neuronal, o sistema de equações foi adotado e adaptado da engenharia elétrica em termos de descrições de auto-oscilações em um circuito oscilatório elétrico. Alan Lloyd Hodgkin e Andrew Huxley adicionaram alguns elementos adicionais e vários coeficientes ao sistema de equações, escolhendo-os para que o resultado de seu trabalho fosse comparado com os dados experimentais obtidos por eles no estudo de axônios de lula.
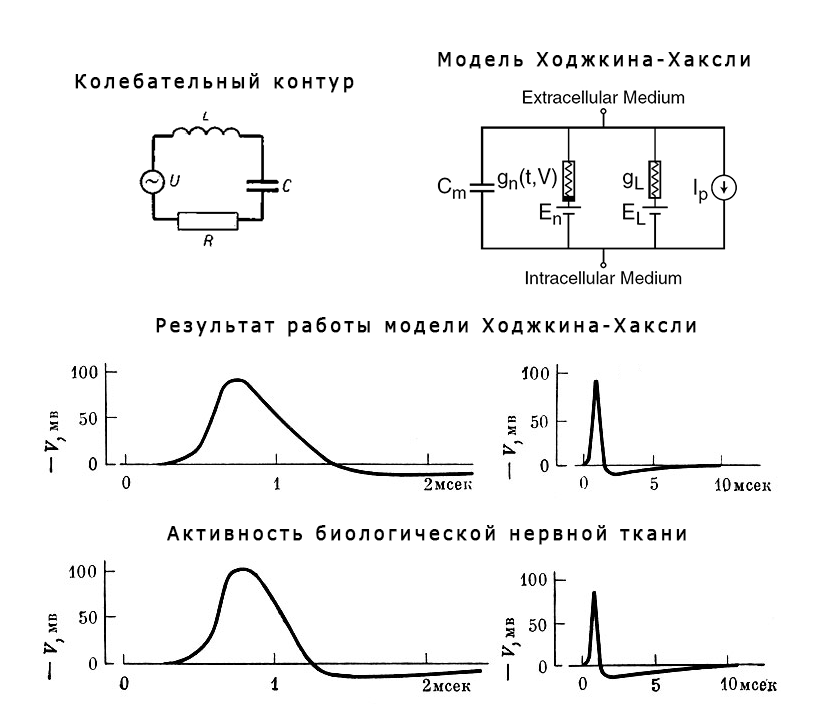 O sistema de equações de Hodgkin-Huxley descreve uma mudança de potencial em apenas um ponto da membrana, para obter uma imagem da propagação da excitação através da membrana e dos processos de um neurônio, você pode dividir o modelo de neurônios em algumas primitivas ou selecionar pontos equidistantes e considerar o sistema de equações em cada um desses pontos. O modelo Hodgkin-Huxley é muito realista, demonstra a distribuição do potencial de ação sobre o corpo do estande, mas o modelo requer grandes recursos computacionais.No meu trabalho, realizo algum tipo de reengenharia do sistema nervoso, realço o significativo e descarto ou simplifico certos processos e fenômenos associados. A natureza do sistema nervoso e das células nervosas é muito diversa e complexa, existem muitas reações químicas, processos intracelulares e fenômenos, mas você não deve transferir tudo para o modelo, primeiro você precisa entender o significado e a finalidade funcional do fenômeno, caso contrário, será uma complicação sem sentido do modelo.Qual é o significado funcional da propagação do potencial de ação ao longo da membrana do neurônio? - Transferência de informações de uma parte de uma célula nervosa para outra. As informações de que uma célula nervosa foi ativada através de receptores ou sinapses devem ir para as extremidades do axônio, superando todo o seu comprimento, que pode atingir até um metro no corpo humano. O que é importante nesse processo? - O tempo desde o início da ativação até a transferência de informações sobre o assunto para a área alvo do tecido nervoso. Em média, a velocidade de propagação do potencial de ação é de 1 m / s, depende de vários fatores, por exemplo, do grau de mielinização do axônio. Por conseguinte, em condições diferentes, o tempo de atraso pode ser diferente. O modelo de Hodgkin-Huxley simula muito realisticamente o processo de propagação de um impulso nervoso ao longo de uma membrana,mas esses detalhes são necessários ao criar um modelo funcional do sistema nervoso?Se podemos simplificar alguma coisa, significa que entendemos alguma coisa. A idéia de simplificação para leis e funções simples, a alocação do principal e sua separação do secundário, pode ser chamada de abordagem funcional.
O sistema de equações de Hodgkin-Huxley descreve uma mudança de potencial em apenas um ponto da membrana, para obter uma imagem da propagação da excitação através da membrana e dos processos de um neurônio, você pode dividir o modelo de neurônios em algumas primitivas ou selecionar pontos equidistantes e considerar o sistema de equações em cada um desses pontos. O modelo Hodgkin-Huxley é muito realista, demonstra a distribuição do potencial de ação sobre o corpo do estande, mas o modelo requer grandes recursos computacionais.No meu trabalho, realizo algum tipo de reengenharia do sistema nervoso, realço o significativo e descarto ou simplifico certos processos e fenômenos associados. A natureza do sistema nervoso e das células nervosas é muito diversa e complexa, existem muitas reações químicas, processos intracelulares e fenômenos, mas você não deve transferir tudo para o modelo, primeiro você precisa entender o significado e a finalidade funcional do fenômeno, caso contrário, será uma complicação sem sentido do modelo.Qual é o significado funcional da propagação do potencial de ação ao longo da membrana do neurônio? - Transferência de informações de uma parte de uma célula nervosa para outra. As informações de que uma célula nervosa foi ativada através de receptores ou sinapses devem ir para as extremidades do axônio, superando todo o seu comprimento, que pode atingir até um metro no corpo humano. O que é importante nesse processo? - O tempo desde o início da ativação até a transferência de informações sobre o assunto para a área alvo do tecido nervoso. Em média, a velocidade de propagação do potencial de ação é de 1 m / s, depende de vários fatores, por exemplo, do grau de mielinização do axônio. Por conseguinte, em condições diferentes, o tempo de atraso pode ser diferente. O modelo de Hodgkin-Huxley simula muito realisticamente o processo de propagação de um impulso nervoso ao longo de uma membrana,mas esses detalhes são necessários ao criar um modelo funcional do sistema nervoso?Se podemos simplificar alguma coisa, significa que entendemos alguma coisa. A idéia de simplificação para leis e funções simples, a alocação do principal e sua separação do secundário, pode ser chamada de abordagem funcional.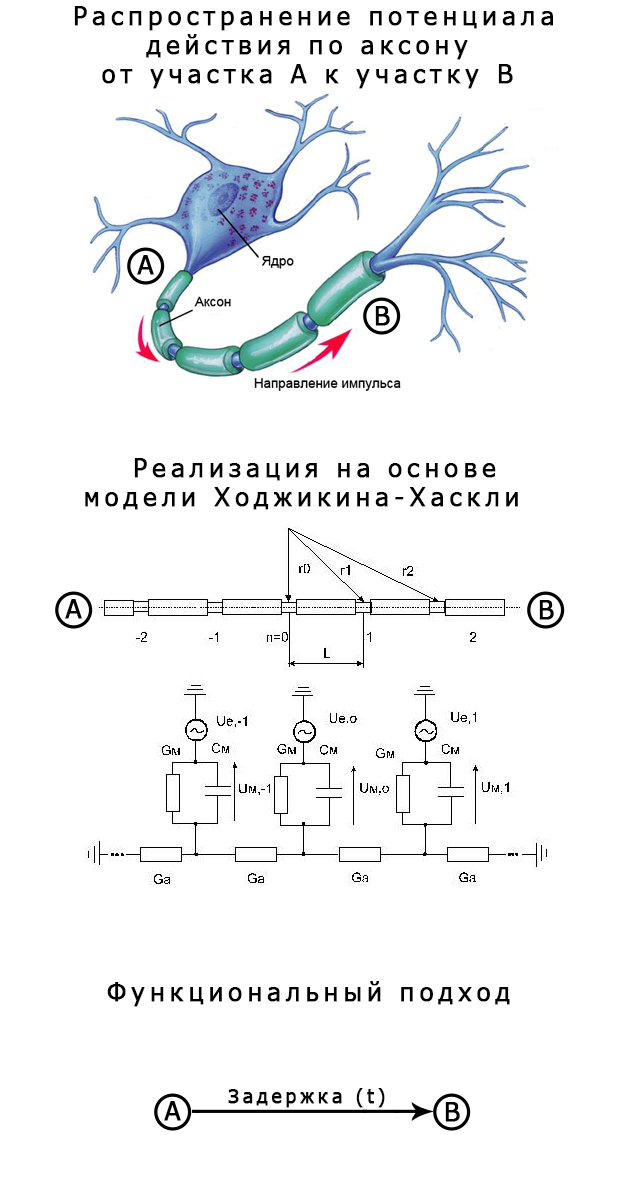 Se você tentar simular o cérebro humano com todos os 86 bilhões de neurônios, repetindo a topologia dos processos e até calculando mal o sistema de equações de Hodgkin-Huxley em uma densa grade de pontos na superfície dos neurônios, todos os recursos computacionais do planeta Terra não serão suficientes. E fazendo previsões sobre a aparência desses modelos, você pode se concentrar em vinte anos de antecedência e, depois desses anos, em outros vinte. Bem, a propagação do potencial de ação não é tudo, você ainda precisa entender a lógica da interação dos neurônios, para resolver esse problema. Para começar, concentrei-me em sistemas nervosos bastante simples, como o sistema nervoso de um verme ou o girino de um sapo.
Se você tentar simular o cérebro humano com todos os 86 bilhões de neurônios, repetindo a topologia dos processos e até calculando mal o sistema de equações de Hodgkin-Huxley em uma densa grade de pontos na superfície dos neurônios, todos os recursos computacionais do planeta Terra não serão suficientes. E fazendo previsões sobre a aparência desses modelos, você pode se concentrar em vinte anos de antecedência e, depois desses anos, em outros vinte. Bem, a propagação do potencial de ação não é tudo, você ainda precisa entender a lógica da interação dos neurônios, para resolver esse problema. Para começar, concentrei-me em sistemas nervosos bastante simples, como o sistema nervoso de um verme ou o girino de um sapo.Desenvolvimento
Você não espera que o uso do mecanismo de jogo em modelos científicos possa causar uma sensação de alerta no público? - uma pergunta semelhante me foi feita por um maravilhoso usuário da Internet. Sim, não recorrai a nenhum sistema de padronização, não usei as linguagens para descrever estruturas biológicas, apenas pelo motivo de exigir muito tempo para estudar o material que o acompanha. Eu não sou um cientista, mas um estrondo comum com uma vida dinâmica e movimentada, mas com muitas idéias, criatividade e desejo de implementação. Portanto, o tempo entre a vida familiar, o trabalho e o sono é atribuído à modelagem pelos meios disponíveis. O mecanismo de jogo do Unity é apenas uma ferramenta no meu trabalho, e é muito bom e conveniente em termos de visualização.Todo o projeto OPENTadpole consiste em apenas duas cenas: um editor de conexão e uma simulação do ambiente. Não houve problemas sérios com o editor durante o processo de desenvolvimento, pois já havia experiência trabalhando na versão anterior do simulador do sistema nervoso .A principal tarefa nesta fase foi a separação da implementação da lógica dos elementos neurais e da visualização, que foi implementada.No estágio seguinte, me virei para trabalhar em um simulador do ambiente e rapidamente implementei o corpo do girino a partir dos componentes padrão do Unity. O corpo do girino consiste em 9 segmentos, interconectados por articulações, alguns pares cinemáticos virtuais e um par de músculos virtuais em ambos os lados. Os músculos virtuais têm uma certa elasticidade, que fornece elasticidade para todo o corpo. A função muscular estava subordinada ao sistema nervoso virtual, carregado através de arquivos salvos, comuns ao editor e à simulação do ambiente.
A função muscular estava subordinada ao sistema nervoso virtual, carregado através de arquivos salvos, comuns ao editor e à simulação do ambiente.Girino esférico no vácuo .gif Desenvolvimento adicional exigiu a adição de um sistema simulando as propriedades físicas do meio, o que não foi uma tarefa fácil para mim. Em algum momento, eu até me arrependi de ter escolhido as aves aquáticas como animais modelo. E, claro, a grande vantagem de usar um mecanismo de jogo muito popular é que muitos complementos, bibliotecas e ativos foram criados e desenvolvidos para ele. Tentei trabalhar com várias bibliotecas, mas o LiquidPhysics2D acabou sendo o melhor. Não há um link oficial para a biblioteca, o site da empresa de desenvolvimento não está mais funcionando, mas você pode encontrá-lo, se desejar, para ajudar o google. Essa biblioteca é baseada no conhecido mecanismo Box2D e é muito otimizada e fácil de usar, com muitos exemplos, então eu consegui usá-la, embora tivesse que colocar muita perseverança.Foi necessário refazer o corpo do girino usando os elementos da biblioteca.O cálculo em tempo real das propriedades físicas de um líquido requer alto poder computacional; portanto, mesmo usando uma biblioteca bem otimizada, é possível obter uma operação estável do aplicativo limitando-se a algumas milhares de partículas.Eu queria ver um girino flutuando livremente dentro de uma área bastante grande; um espaço limitado e forte não me permitiria apreciar completamente o modelo. Decidiu-se criar e remover dinamicamente partículas na área do girino circundante; era necessário dividir o espaço em áreas quadradas especiais e regular a aparência e a remoção de partículas, dependendo da posição do girino.A fim de evitar que o usuário se sinta envergonhado pelos quadrados dançantes, a visibilidade das partículas foi limitada, como resultado de uma espécie de aura exibindo partículas ao redor do corpo do girino, que pode ser desativada pressionando F12.Resultado
O objetivo de tais projetos é identificar algumas regras gerais para a organização do sistema nervoso e as leis de interação dos neurônios que determinam o comportamento do animal. O projeto OPENTadpole a esse respeito pode ser chamado de completo, todos podem tentar a si mesmos no papel do Criador e encher o corpo vazio do girino virtual com o sistema nervoso do zero, permitindo que ele se mova ativamente no espaço e interaja com o ambiente e viva em seu mundo estrito e limitado. De fato, enquanto o desenvolvimento estava em andamento, recebi muitas emoções positivas, vendo como minhas ações tornam o comportamento do girino mais animado.O arquivo com o aplicativo possui um excelente guia colorido que descreve os principais aspectos do programa, além de vários exemplos salvos que ajudarão você a entender os princípios do sistema nervoso (link no final do artigo). O modelo é baseado nos mesmos princípios de que falei em minhas publicações anteriores ( parte 1 , parte 2 ), e não houve especulações sobre a interação eletromagnética dos neurônios, apenas sobre as quais grandes mentes escreveram e receberam prêmios Nobel. Tudo dentro da estrutura da doutrina científica, mas incorporado em uma nova forma concisa, pode ser usado como uma ferramenta de ensino.Natação
A cadeia neural responsável pela natação é baseada em um gerador de atividades ordenado, tais geradores são encontrados em todos os sistemas nervosos de animais simples, são cadeias fechadas de neurônios capazes de gerar excitação rítmica sem feedback.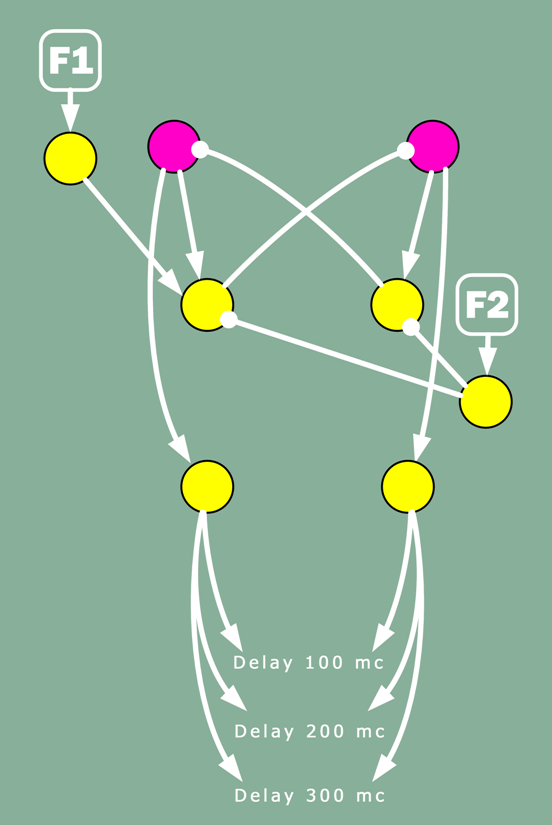 O esquema do gerador de atividade ordenada do girino do sapo é representado por quatro neurônios localizados simetricamente no corpo do girino. Dois neurônios (dIN, violeta) neste circuito têm uma característica específica, eles saem do estado de inibição, criando um pico de atividade. Cada um desses neurônios ativa um neurônio inibitório (inibitório), que por sua vez tem um efeito cruzado no neurônio dIN. Assim, um certo circuito da circulação da excitação nervosa é obtido. É possível iniciar este gerador usando uma única ativação de um dos neurônios do gerador, e é possível interromper a operação do gerador se a ativação de um dos neurônios da cadeia for impedida por um efeito inibitório mais forte.Para realizar experimentos no sistema OPENTadpole, foram alocadas 4 chaves receptoras F1, F2, F3 e F4, nos exemplos salvos, o gerador inicia o receptor F1, a atividade nele foi suprimida por F2.A atividade do gerador é distribuída alternadamente no lado direito e esquerdo ao longo do corpo do girino, para cada neurônio motor começando da cabeça até a ponta da cauda; a excitação ocorre com um atraso de 100 milissegundos, isso ocorre pelo fato de a propagação da excitação ter uma velocidade finita. A velocidade de propagação da excitação em diferentes axônios pode variar; em axônios com um maior grau de mielinização (uma camada mais espessa de mielina), a velocidade será maior. Por exemplo, no corpo da lula existem alguns dos maiores axônios, com quase 1 mm de diâmetro, que participam do reflexo fugitivo protetor, quando a lula, afastando-se do possível perigo com um fungo de cauda rápido e poderoso, foge de um possível perigo, uma alta taxa de transmissão de sinal é necessária aqui.Existem muitos geradores semelhantes no sistema nervoso do girino biológico, localizados ao longo do corpo e conectados em série. Se apenas um gerador estivesse presente no sistema nervoso do girino, isso criaria um grande risco, danos a um neurônio ou mesmo uma sinapse deste circuito levarão à perda da capacidade de movimento. Para simulação por computador, não existem problemas, portanto, um modelo é suficiente para o modelo.
O esquema do gerador de atividade ordenada do girino do sapo é representado por quatro neurônios localizados simetricamente no corpo do girino. Dois neurônios (dIN, violeta) neste circuito têm uma característica específica, eles saem do estado de inibição, criando um pico de atividade. Cada um desses neurônios ativa um neurônio inibitório (inibitório), que por sua vez tem um efeito cruzado no neurônio dIN. Assim, um certo circuito da circulação da excitação nervosa é obtido. É possível iniciar este gerador usando uma única ativação de um dos neurônios do gerador, e é possível interromper a operação do gerador se a ativação de um dos neurônios da cadeia for impedida por um efeito inibitório mais forte.Para realizar experimentos no sistema OPENTadpole, foram alocadas 4 chaves receptoras F1, F2, F3 e F4, nos exemplos salvos, o gerador inicia o receptor F1, a atividade nele foi suprimida por F2.A atividade do gerador é distribuída alternadamente no lado direito e esquerdo ao longo do corpo do girino, para cada neurônio motor começando da cabeça até a ponta da cauda; a excitação ocorre com um atraso de 100 milissegundos, isso ocorre pelo fato de a propagação da excitação ter uma velocidade finita. A velocidade de propagação da excitação em diferentes axônios pode variar; em axônios com um maior grau de mielinização (uma camada mais espessa de mielina), a velocidade será maior. Por exemplo, no corpo da lula existem alguns dos maiores axônios, com quase 1 mm de diâmetro, que participam do reflexo fugitivo protetor, quando a lula, afastando-se do possível perigo com um fungo de cauda rápido e poderoso, foge de um possível perigo, uma alta taxa de transmissão de sinal é necessária aqui.Existem muitos geradores semelhantes no sistema nervoso do girino biológico, localizados ao longo do corpo e conectados em série. Se apenas um gerador estivesse presente no sistema nervoso do girino, isso criaria um grande risco, danos a um neurônio ou mesmo uma sinapse deste circuito levarão à perda da capacidade de movimento. Para simulação por computador, não existem problemas, portanto, um modelo é suficiente para o modelo.Manobras
O girino tem a capacidade de mudar a direção de sua natação, realizar algumas manobras, para isso, no momento da natação, é necessário que os músculos do lado para o qual o girino pretenda se contrair mais ou mais intensamente, mantendo a mesma frequência de contrações.Pode-se dizer que os sinais no sistema nervoso, para todos os animais, são discretos. A amplitude do potencial de ação é sempre e em toda parte estável, o sinal em si tem um caráter curto e de pico, mas, ao mesmo tempo, podemos facilmente alterar o grau de tensão nos músculos, de maneira suave e precisa, tudo é determinado pela frequência de comandos enviados aos grupos musculares. Quanto mais freqüentemente os pulsos, mais forte é a contração muscular. Assim, controlando a frequência dos impulsos ativadores, o sistema nervoso controla os grupos musculares e é flexível o suficiente.Um mecanismo simples de soma temporal de um neurônio facilita o controle da frequência de pulsos alterando o limiar do somador. O nível do limiar de soma em um neurônio biológico é determinado por sua configuração geral, tamanho do neurônio, número e densidade de receptores na membrana pós-sináptica, número e densidade de canais iônicos na membrana, em geral, a partir do metabolismo das células nervosas. E todos esses parâmetros podem mudar ativamente em uma célula viva sob a influência de um efeito modulador nela.Há muito que estamos acostumados ao fato de que, ao descrever o trabalho do sistema nervoso, eles falam apenas de dois tipos de efeitos sinápticos: estimulantes e inibitórios. Mas, de fato, essa é uma imprecisão fatal que distorce a compreensão dos princípios do sistema nervoso. Em seu trabalho, o neurocientista cientista americano Eric Kandel descreveu o mecanismo molecular da exposição sináptica, levando a alterações metabólicas na célula e na sinapse, pelo qual em 2000 ele recebeu o Prêmio Nobel. Os neurônios moduladores e os mecanismos moduladores são há muito utilizados na descrição dos princípios do sistema nervoso, uma vez que esses mecanismos desempenham um papel significativo em seu trabalho.O modelo distingue um tipo separado de conexão sináptica, que pode afetar o nível limite do somador, por um determinado período de tempo - a sinapse moduladora. Se você modular, diminua o limiar do somador em um neurônio modulado intercalado (verde no esquema a seguir), isso aumentará sua sensibilidade e, após a ativação, gerará não apenas um pico, mas toda uma série de pulsos. Assim, transformando o sinal do gerador, é possível realizar manobras, voltas ao nadar. Se, dessa maneira, os neurônios de ambos os lados forem modulados ao mesmo tempo, o girino simplesmente nadará para frente mais ativamente.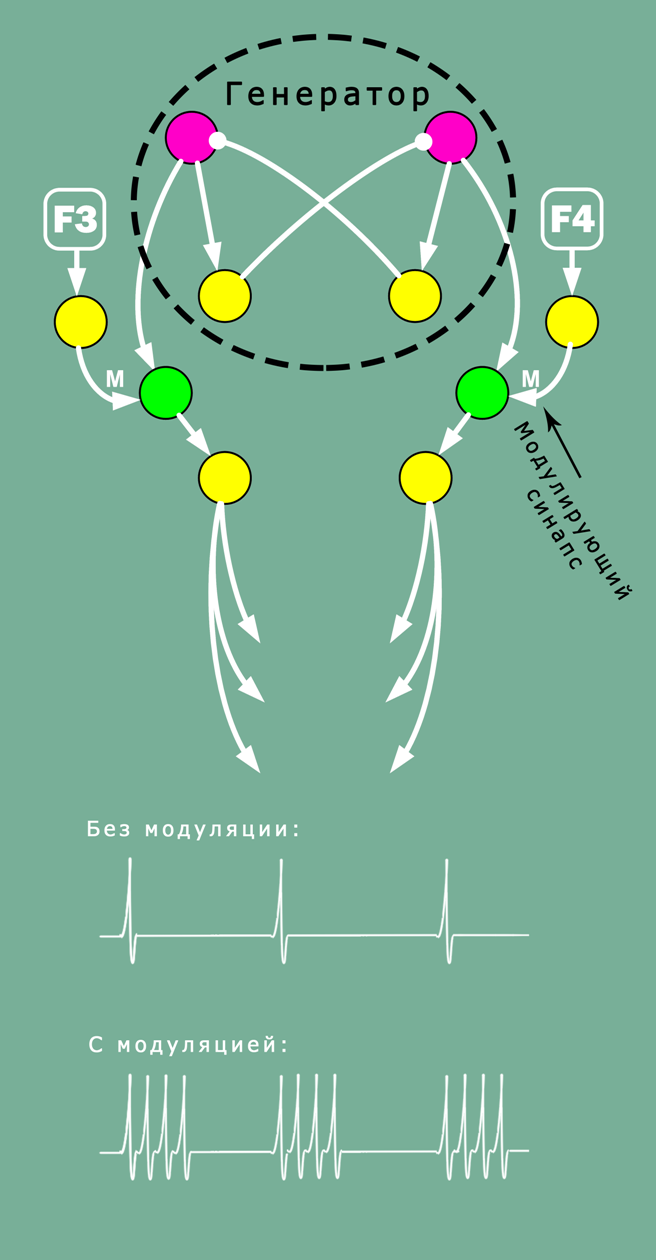 O tópico da modulação no sistema nervoso é muito extenso, apesar de neste modelo me restringir a controlar o nível do limiar de ativação. Dadas as mudanças que podem ocorrer dinamicamente no sistema nervoso, pode-se dizer que a modulação pode ser muito diversificada, incluindo mudanças na força das sinapses, mudanças na plasticidade, grau de dependência, tempo de atraso sinótico e propriedades metabólicas da célula.O controle usando sinapses moduladoras, bem como o controle da operação do gerador, possibilitou implementar alguns reflexos de proteção, por exemplo, começar a nadar quando o girino toca a cabeça e desviar na direção oposta do contato, o que permite que o girino nade livremente no aquário virtual, navegando de suas paredes.
O tópico da modulação no sistema nervoso é muito extenso, apesar de neste modelo me restringir a controlar o nível do limiar de ativação. Dadas as mudanças que podem ocorrer dinamicamente no sistema nervoso, pode-se dizer que a modulação pode ser muito diversificada, incluindo mudanças na força das sinapses, mudanças na plasticidade, grau de dependência, tempo de atraso sinótico e propriedades metabólicas da célula.O controle usando sinapses moduladoras, bem como o controle da operação do gerador, possibilitou implementar alguns reflexos de proteção, por exemplo, começar a nadar quando o girino toca a cabeça e desviar na direção oposta do contato, o que permite que o girino nade livremente no aquário virtual, navegando de suas paredes.Onde velejar?
O girino aprendeu a nadar e pode escolher livremente uma direção, mas para escolher essa direção ele precisa de um objetivo, e esse objetivo é justificado, talvez comida. Para detectar alimentos, o girino possui dois receptores especiais de olfato, separados por uma linha especial, a “ponte do nariz”, através da qual o receptor não consegue detectar a presença de alimentos. Quanto mais próximo o alimento, mais frequentemente o receptor é ativado, levando em consideração o quadrado da distância. Obviamente, esse modelo de olfato é uma forte simplificação, mas dentro da estrutura da simulação é bastante aceitável.Nos exemplos, os sinais de dois receptores passam primeiro por uma cadeia de neurônios na qual ocorre a supressão mútua e, em seguida, exercem um efeito modulador nos neurônios motores, controlando o movimento do girino.
Obviamente, esse modelo de olfato é uma forte simplificação, mas dentro da estrutura da simulação é bastante aceitável.Nos exemplos, os sinais de dois receptores passam primeiro por uma cadeia de neurônios na qual ocorre a supressão mútua e, em seguida, exercem um efeito modulador nos neurônios motores, controlando o movimento do girino.Pesquisa de Alimentos .gif Necessidades
Queria que o comportamento do girino fosse um pouco mais complexo do que apenas seguir a comida, por isso foi decidido simular os mecanismos das necessidades. Em primeiro lugar, essa é a necessidade de alimentos, a fome é um desejo natural de consumir a fonte de energia necessária para o movimento e o desenvolvimento do corpo. E, naturalmente, a fome deve ter um grau diferente; se o animal estiver cheio, a comida não deve ser de grande interesse para ele. Em segundo lugar, não há uma necessidade menos fundamental de conservação de energia, que nasceu evolutivamente muito cedo e é de importância fundamental no comportamento de todos os animais. Ser preguiçoso é tecido em nossa essência, isso nos permite otimizar nosso comportamento em termos de consumo de energia, quem alcança o resultado com menos desperdício de recursos energéticos é mais bem-sucedido.
Para realizar essas duas necessidades, dois receptores especiais foram introduzidos; quanto maior a necessidade, mais frequentemente eles são ativados. O nível de saturação diminui com o tempo, a taxa dessa diminuição é ajustável pelo usuário e a sensação de fadiga aumenta dependendo da intensidade das contrações musculares.

Nos exemplos de conservação, pode-se observar alguma competição entre essas duas necessidades: a fadiga não pode ser suprimida pela fome intensa, mas a fome severa é mais forte do que a fadiga severa.
Agora, o comportamento do girino se tornou ainda mais animado, depende de motivos e desejos internos:
Comportamento .gif complicado Conclusões
O girino nada e come, e muito mais: responde à luz, ao toque, se você o agarrar pela cabeça, tenta romper (conforme fornecido no simulador), procura e encontra comida, sofre de fome e fadiga e tudo isso sob o controle de neurônios virtuais .
O girino mais complexo possui 63 neurônios e 131 conexões sinápticas; lembro que Caenorhabditis elegans possui 302 neurônios, e o girino biológico requer 1.500 neurônios apenas para nadar normal. Quanto mais desenvolvido o animal, maior a redundância de neurônios na solução de problemas, devido a processos evolutivos e à necessidade de confiabilidade do sistema. Ainda é difícil avaliar a redundância de neurônios em relação ao cérebro humano, mas, na minha opinião, implementar um modelo de computador próximo ao cérebro humano, computadores quânticos ou mainframes, um computador doméstico suficientemente poderoso, não será necessário. Esta é uma afirmação muito ousada, em primeiro lugar, contrária à opinião de muitos especialistas neste tópico, e em segundo lugar, remover a aréola da supercomplexidade dessa tarefa, sem a qual é difícil derrubar fabulosos investimentos dos investidores. O principal agora não é o poder da computação, mas o desenvolvimento da tecnologia e das abordagens corretas.
Planos futuros
O OPENTadpole é um pequeno estágio, em um longo caminho para desenvolver uma ferramenta para modelar sistemas nervosos complexos que, na minha opinião, foi concluída com êxito.
A próxima tarefa: criar um modelo que possa distinguir entre comandos de voz simples, assim como os animais de estimação, para aprendê-los e, se necessário, treinar novamente, com uma compreensão do contexto da equipe. Enquanto trabalho, tentarei compartilhar minhas descobertas com os leitores do GT.
OPENTadpole dowland para WindowsCódigo fonte