 Uma das opções para músculos artificiais pode ser vista na parte superior da foto (dois tubos). Eles levantam um pneu de carro pesando 22 kg. Foto: Instituto de Tecnologia de Massachusetts
Uma das opções para músculos artificiais pode ser vista na parte superior da foto (dois tubos). Eles levantam um pneu de carro pesando 22 kg. Foto: Instituto de Tecnologia de MassachusettsOs "músculos" artificiais afirmam ser unidades seguras e poderosas para muitos dispositivos diferentes: de máquinas convencionais a eletrônica e robótica implantáveis. Mas muitas vezes o design e a produção desses "músculos" são muito complexos e caros, o que limita seu uso. Um grupo de cientistas do Instituto de Tecnologia de Massachusetts e da Universidade de Harvard desenvolveu um
projeto de unidade biocompatível
extremamente simples que custa
menos de um dólar , enquanto é poderoso o suficiente para um dispositivo tão primitivo.
As unidades podem ser fabricadas com diferentes materiais e tamanhos diferentes, usando um design publicado no estilo origami. Eles trabalham no ar, debaixo d'água, no vácuo.
O conceito básico do novo dispositivo inclui apenas uma estrutura compressível, um invólucro externo (“pele”) e um material de enchimento, que pode ser qualquer material fluido, como ar ou água.
As experiências demonstraram que essas unidades podem comprimir até 10% do seu comprimento máximo, suportam cargas de até 600 kPa e a potência específica máxima excede 2 quilowatts por quilograma. Isso corresponde aproximadamente ou excede o poder específico dos músculos humanos.
 Projeto, processo de fabricação e unidades de múltiplas escalas resultantes
Projeto, processo de fabricação e unidades de múltiplas escalas resultantesO trabalho dos músculos artificiais, bem como o processo barato de sua produção, são mostrados na ilustração acima.
Legend(A) Acionamentos lineares em miniatura usando estruturas de origami em zigue-zague feitas de polieterétercetona (PEEK) como molduras e filme de PVC como uma “capa”. Devido ao uso de materiais biocompatíveis, essas unidades são adequadas para uso em implantes médicos e eletrônicos vestíveis. (B) Uma unidade grande e poderosa montada em uma moldura em zigue-zague feita de chapas de impressão de nylon. A “pele” é feita de nylon revestido com poliuretano termoplástico. Uma roda de carro pesando 22 kg sobe a uma altura de 20 cm em 30 segundos (
vídeo ). (C) O princípio de operação do inversor. A contração muscular ocorre principalmente devido à força de tensão da "pele". Essa força é criada pela diferença de pressão entre o fluido interno e o meio externo. A remoção de fluido do atuador aumenta temporariamente a pressão interna. (D) processo de produção. Uma unidade padrão pode ser produzida rapidamente em três etapas simples: criando um chassi usando qualquer um dos vários métodos de produção; preparação da "pele"; selagem de uma camada impermeável apertada.
 Acionamentos em zigue-zague linear feitos por diferentes métodos e diferentes materiais
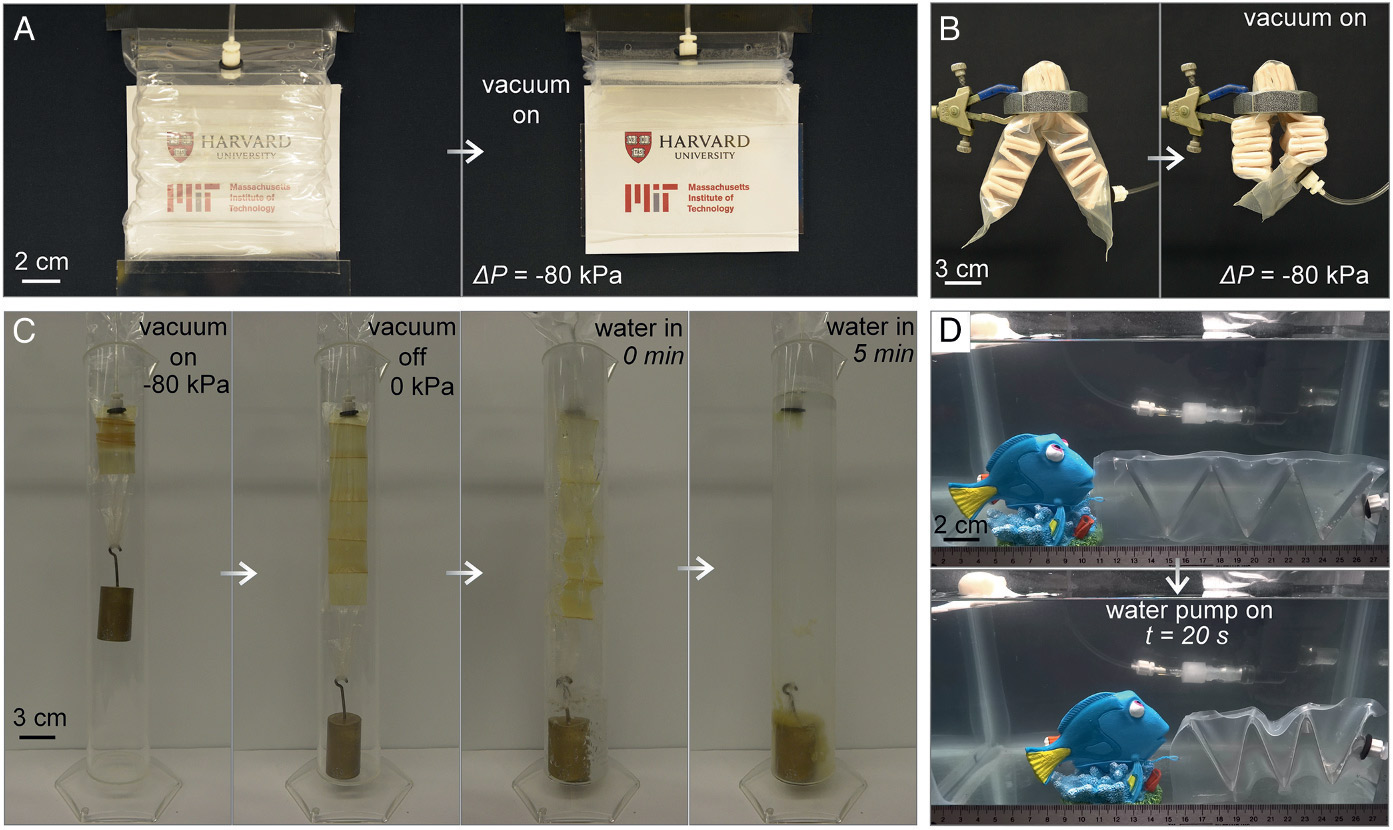
Acionamentos em zigue-zague linear feitos por diferentes métodos e diferentes materiaisParte A mostra uma unidade transparente fina que levanta uma placa de acrílico. Aqui, a estrutura é feita de uma folha de poliéster transparente com 0,254 mm de espessura por corte a laser e dobragem manual. Couro: película transparente de PVC (vinil) com 0,102 mm de espessura. Material fluido: ar.
Na Figura B, uma unidade linear flexível funciona bem mesmo quando travada em uma porca de metal. Armação e couro: borracha de silicone e poliuretano termoplástico 0,24 mm. Material fluido: ar.
Na Figura C, uma unidade solúvel em vácuo se dissolve em água quente a uma temperatura de cerca de 70 ° C em cinco minutos. A armação e o couro são feitos de acetato de polivinila. Material fluido: ar.
Finalmente, a última ilustração mostra que um passeio com água em vez de ar como material fluido em uma estrutura de aço trabalha com sucesso debaixo d'água, em particular, move um peixe de 3,5 cm.
"Atuadores como músculos artificiais são uma das tarefas mais importantes em geral na engenharia", diz o doutor Rob Wood, um dos quatro autores do trabalho científico. "Agora, criamos unidades com características semelhantes aos músculos reais, para que você possa imaginar a fabricação de praticamente qualquer robô para praticamente qualquer tarefa".
O artigo científico foi
publicado em 27 de novembro de 2017 na revista
Proceedings da National Academy of Sciences (doi: 10.1073 / pnas.1713450114,
pdf ).