
Continuamos a revisar robôs militares. Na
primeira parte, examinamos amostras de empresas QinetiQ (Grã-Bretanha), Boston Dynamics (EUA) e Izhevsk Radio Plant OJSC (Rússia). Desta vez, robôs capazes de trabalhar sobre e debaixo d'água foram adicionados aos do solo.
iRobot, EUA
A empresa foi fundada por três cientistas no Instituto de Tecnologia de Massachusetts em 1990. Robôs militares produzidos, financiados pela DARPA. Também é conhecida pela produção de robôs domésticos:
aspirador de pó robótico
Roomba , esfregão robótico Braava e
robô de limpeza de piscina Mirra. Em 2016, a iRobot decidiu se concentrar no uso pacífico da robótica e vendeu seu negócio de desenvolvimento de produtos militarizados para a
Arlington Capital Partners . Mas antes disso, o iRobot conseguiu produzir muitos robôs para fins militares.
O PackBot é o primeiro robô militar da empresa financiado pela DARPA (contrato concedido em 1998). De fato, esta é uma plataforma robótica na qual você pode instalar várias ferramentas, dependendo da tarefa. A versão básica do PackBot Scout tinha cinco compartimentos para dispositivos. O PackBot Explorer está equipado com câmeras (incluindo infravermelho), um ponteiro laser e sensores de áudio. A configuração do PackBot 510 tornou-se a mais comum - este robô pode ser equipado com dispositivos para limpeza de dispositivos explosivos, sistemas REDOWL para detecção de franco-atiradores e até kits para detectar contaminação por radiação. A versão moderna do PackBot 510 com um manipulador pesa 10,89 kg, tem uma velocidade de até 9,3 km / h e pode trabalhar autonomamente de 4 a 8 horas, dependendo da intensidade de uso. Os robôs PackBot têm sido amplamente utilizados pelos militares dos EUA no Iraque e no Afeganistão. Vários PackBot também estiveram envolvidos em operações de busca e salvamento após o ataque terrorista de 11 de setembro de 2001 nos Estados Unidos.
 110 FirstLook
110 FirstLook é um robô de rastreamento compacto e multifuncional desenvolvido em 2011. O principal objetivo é ajudar na detecção de perigo potencial durante a execução de uma operação militar. É equipado com quatro câmeras com iluminação infravermelha e um meio de comunicação. Pode cair com segurança de uma altura de 4,5 m sobre uma superfície dura. Além disso, se rolar, poderá retornar à sua posição original graças às nadadeiras rotativas. Exemplo de uso: é jogado manualmente na janela e transfere a imagem para o painel de controle. O robô pesa 2,4 kg, seu comprimento é de 25,4 cm, sua velocidade máxima é de 5,5 km / h, trabalha até 6 horas a uma distância de até 200 m do operador. Dependendo da tarefa, pode ser adicionalmente equipado com um manipulador para o descarte de dispositivos explosivos, um termovisor, bem como meios de reconhecimento bacteriológico, químico e de radiação. Temperaturas de operação - de -20 ° C a +55 ° C. Em 2012, a Organização Conjunta de Derrotas Improvisadas contra Ameaças (JIDO) adquiriu uma centena desses robôs e, mais tarde, o Pentágono ordenou que outras 500 trabalhassem no Afeganistão.

é uma plataforma robótica projetada principalmente para mover objetos potencialmente perigosos (por exemplo, material bélico não explodido). Se necessário, pode ser usado para limpar o caminho, extinguir um incêndio ou reconhecimento. Graças ao braço robótico, ele também pode levar soldados feridos do campo de batalha, agarrando-os pelas roupas. É equipado com câmeras de vídeo e vários sensores. O peso da plataforma sem um manipulador é de 165,6 kg, com um manipulador - 226,8 kg. O manipulador pode ser estendido até uma distância de 192,2 cm, em uma posição totalmente estendida, opera com uma carga de até 31,6 kg, em uma posição fechada - com uma carga de até 136,1 kg. O robô supera obstáculos de até 47 cm de altura e pode descer ladeira abaixo até 45º. Funciona de 4 a 10 horas e é controlado a uma distância de até 800 m do operador.
O Seaglider é um veículo subaquático autônomo e desabitado, que de fato foi desenvolvido pela Universidade de Washington, mas ganhou popularidade depois que o iRobot em 2008 adquiriu o direito de fabricar o veículo. Ele estuda as propriedades físicas, biológicas e químicas da água e pode transmitir os dados usando um transmissor e uma antena de cauda. Para fazer isso, o dispositivo aparece para que a cauda fique acima da superfície da água. A aparência do robô se assemelha a um foguete. Vida útil da bateria (dependendo da missão) - até 10 meses com uma reserva de energia de 4600 km. Com um peso de 52 kg, o robô mergulha a uma profundidade de 1000 me se move a uma velocidade de 0,5 nós. Em maio de 2010, a Seaglider participou da exploração do Golfo do México após a explosão da plataforma de petróleo Deepwater Horizon.
O Ranger é um veículo subaquático não tripulado, também desenvolvido não pela iRobot, mas por uma empresa chamada Nekton Research. Este último foi adquirido pela iRobot e a equipe de desenvolvimento original ingressou na nova empresa. O robô participa de missões expedicionárias, missões de detecção de mísseis, missões de reconhecimento e patrulha. Ao contrário do Seaglider, o Ranger está equipado com uma hélice e foi projetado para tarefas curtas. Com um comprimento total de 0,86 m, pesa pouco menos de 20 kg e se move a uma velocidade de cerca de 15 nós (27,78 km / h).
O Transphibian é um veículo subaquático autônomo e desabitado, projetado para
detecção de minas, operações de reconhecimento e vigilância da água. Utiliza um sistema de navegação híbrido, pelo qual pode executar tarefas tanto em águas rasas quanto em profundidade. Equipado com quatro barbatanas. Em movimento, parece uma pequena tartaruga que não sabe nadar.
O Chembot é um projeto de robô em miniatura flexível patrocinado pela DARPA - eles precisavam de um robô que pudesse se espremer em um buraco com cerca de 30 mm de diâmetro. Conforme planejado, os materiais sólidos devem estar ausentes no design e a “pele” do robô deve consistir em um polímero elástico capaz de expandir e contrair. O robô entrou em movimento devido à mudança da pressão do ar em diferentes partes do seu "corpo". Protótipos separados de robôs foram criados, mas os criadores não descobriram como torná-lo autônomo e se livrar de vários fios responsáveis pela pressão.
LANdroid é um roteador de robô em miniatura. O IRobot venceu uma competição da DARPA por seu desenvolvimento em 2008. Um ano depois, foi lançado o LANdroid Ember, que foi colocado no bolso de uma calça militar. O objetivo do robô é construir rapidamente uma rede sem fio para receber e enviar informações nos campos de batalha. O robô estava equipado com câmeras e antenas. O design também inclui nadadeiras rotativas.
Samsung Techwin (agora Hanwha Techwin), Coréia do Sul
A empresa foi fundada em 1977 sob o nome Samsung Techwin, como subsidiária da Samsung. Em 1979, ela começou a fabricar câmeras de vídeo. Um ano depois, ela mudou para motores a jato para a Força Aérea da Coréia do Sul (fabricada em conjunto com a General Electric). Desde então, a empresa está envolvida na produção de helicópteros, gravadores de vídeo, sistemas de vigilância por vídeo e lentes. Juntamente com outras empresas, ela desenvolveu semicondutores, sistemas de comunicação óptica, participou de atividades de pesquisa na indústria aeroespacial e trabalhou com nanotecnologia. Em dezembro de 2014, a Samsung anunciou a venda da Techwin ao conglomerado sul-coreano Hanwha Group. Em junho de 2015, a aquisição foi concluída e a empresa foi renomeada como Hanwha Techwin.
 A Samsung SGR-A1
A Samsung SGR-A1 é uma torre robótica projetada para apoiar as forças armadas sul-coreanas na zona desmilitarizada coreana. O desenvolvimento começou em 2003 e, em 2006, os primeiros protótipos apareceram. É equipado com um telêmetro a laser, uma câmera termográfica infravermelha, um iluminador infravermelho, uma metralhadora Daewoo K3 de 5,56 mm e uma lançadora de granadas semi-automática Milkor M32 de 40 mm e 40 mm. Ele pode rastrear e rastrear alvos durante o dia (alcance de até 4 km) e à noite (alcance de 2 km). Mas, para o uso de armas letais, é necessário um operador. Peso de construção - 117 kg, altura - 120 cm, alcance - até 3,2 km.
OJSC “766 Produção e gerenciamento de equipamentos tecnológicos”, Rússia
A "766 UPTK" foi criada em 2001 e é especializada no desenvolvimento e produção de robótica militar. Possui seu próprio centro de engenharia e design. Entre outras atividades, estão indicados pesquisa, projeto, trabalho experimental e de teste, bem como o desenvolvimento e produção de certos tipos de materiais e estruturas de construção.
 "Urano-6"
"Urano-6" é um complexo de lagarta robótico para limpar áreas perigosas. Pode trabalhar em áreas urbanizadas, montanhosas e rasas. De fato, isso nada mais é do que uma rede de arrasto controlada remotamente. Quatro câmeras oferecem visibilidade total. São fornecidas cinco ferramentas intercambiáveis para interagir com diferentes tipos de solo. O robô trabalha em uma superfície com uma inclinação de até 20º e supera obstáculos de até 1 m de altura. Pode levantar peso de até 1 t. O robô pesa 6 t, pode trabalhar por 5 horas sem reabastecer (usa diesel). A gestão do complexo é realizada a uma distância de até 800 m. "Uranus-6" participou da limpeza de Palmyra.
"Urano-9" é um complexo robótico de combate multifuncional. A principal missão é o apoio de fogo e reconhecimento. Graças ao sistema modular, ele pode ser equipado com vários tipos de armas. Conjunto padrão: metralhadora Kalashnikov modernizada (PKTM) de calibre 7,62 mm, pistola automática 2A72 de calibre 30 mm, sistema de armas guiadas Ataka e quatro lança-chamas de infantaria RPM PDM-A Shmel-M. Equipado com um sistema de aviso a laser e um sistema de cortina de fumaça. Também é equipado com sensores de temperatura, um telêmetro a laser, câmeras diurnas e noturnas. Em ordem de marcha, pesa 12 toneladas e pode viajar a velocidades de até 35 km / h. Em um posto de gasolina, o motor diesel pode funcionar por 6 horas seguidas. A gestão do complexo é realizada a uma distância de 4 km. Atinge alvos a uma distância de até 5 km durante o dia e até 3,5 km à noite.
 "Urano-14"
"Urano-14" é um complexo robótico de combate a incêndios. Projetado para extinguir incêndios em locais perigosos ou inacessíveis para pessoas, por exemplo, em um armazém em chamas com munição. Pode ser usado para reconhecimento de incêndios, inclusive ocultos - graças ao sistema de imagem térmica de videovigilância. Funciona em superfícies com uma inclinação de até 30º. O peso-meio-fio é de 14 toneladas, a velocidade máxima é de 10 km / h, o alcance do fluxo de água é de 50 M. É controlado remotamente a uma distância de até 1 km.
NITI Progress OJSC, Rússia
Este instituto de pesquisa e desenvolvimento foi criado em junho de 1959 para acelerar o desenvolvimento e a produção do míssil balístico líquido R-17 de estágio único. Por sua contribuição para a criação de novas tecnologias de foguetes, o NITI Progress recebeu a Ordem da Bandeira Vermelha do Trabalho em 1982. Além de pedidos da indústria de defesa, o instituto está desenvolvendo equipamentos para processar minérios de ouro, imprimir dinheiro, revestimentos de proteção de enrolamento, fabricar pneus, reparar redes de aquecimento, trabalhar madeira e outros campos de atividade.
 Platform-M
Platform-M é um sistema rastreado robótico multifuncional. Projetado principalmente para unidades de apoio ao fogo em missões de batalha e reconhecimento. Você pode "pendurar" uma camada de mina ou uma rede de arrasto em um robô - então ele poderá executar tarefas de mineração ou desminagem. O robô está equipado com uma metralhadora Kalashnikov com um tanque modernizado (PKTM) de calibre 7,62 mm com 400 cartuchos de munição, quatro metralhadoras AGS-30 de calibre 30 mm e o sistema de mísseis anti-tanque Kornet. Trabalha em superfícies com uma inclinação de até 25º. Com seu próprio peso de 800 kg, o robô se move a uma velocidade de até 12 km / h e
pode transportar cargas de até 300 kg. Fontes de energia próprias são suficientes para 10 horas de movimento contínuo. O design do robô também inclui câmeras de vídeo, um telêmetro, um termovisor e a estação de radar Fara.
 O CPP
O CPP é um robô compacto que pouco se sabe. É equipado com duas câmeras de vídeo e, devido ao seu pequeno tamanho, pode realizar missões de reconhecimento. Por exemplo, ele pode ser jogado manualmente na janela de um prédio e transmitir ao operador uma imagem do que está dentro. Funciona em esteiras de lagarta.
Expoente, EUA
A empresa foi fundada como Failure Analysis Associates em abril de 1967. Ele participa de investigações de desastres e outros incidentes: de incêndios e acidentes de avião a derramamentos de petróleo e bombardeios. Ele também está estudando os efeitos dos danos. Seguindo instruções da NASA em 1986, a empresa se envolveu no estudo do acidente com o ônibus Challenger. Conhecido por pesquisa e desenvolvimento em mais de 20 campos científicos. Renomeado expoente em 1998.
 O MARCbot
O MARCbot é uma plataforma robótica com rodas projetada para detectar dispositivos explosivos. Foi criado em 2004 e foi desenvolvido como uma versão barata do robô para uso no Iraque. É equipado com uma câmera de vídeo em uma barra retrátil para verificar vários objetos (por exemplo, carros) quanto a dispositivos explosivos. Este é um dos robôs mais pequenos e mais usados no Iraque. De acordo com o ensaio do cientista político P.V. Cantor "Robôs em guerra: o novo campo de batalha", alguns soldados do Exército dos EUA no Iraque anexaram uma mina de fragmentação anti-pessoal M18A1 Claymore ao MARCbot para enviar o robô para frente se houver suspeita de uma emboscada. O peso da estrutura é de 15 kg, comprimento - 61 cm, altura - 34 cm. Funciona até 6 horas seguidas com uma única carga de bateria. É controlado a uma distância de até 300 m do operador.
Robótica aplicada SKTB MSTU. N.E. Bauman, Rússia
Um departamento especial de design e tecnologia data de 1972 - por ordem do reitor do então MVTU im. N.E. Bauman criou um laboratório estudantil de sistemas de transporte na Faculdade de Engenharia Mecânica. Em sua base, foram desenvolvidos modelos de planet
rovers e penetrômetros para instalação em um rover lunar e um
rover . Em 1986, ficou conhecido como o Bureau de Design da Special Robotics MVTU im. N.E. Bauman, em 1999 - SKTB aplicou robótica MSTU. N.E. Bauman. Agora ela se transformou na SKTB LLC de robótica aplicada. Mais de 30 anos especializados no desenvolvimento de sistemas robóticos móveis e equipamentos adicionais. Também desenvolve manipuladores médicos.
 O MRK-27
O MRK-27 é um complexo robótico móvel desenvolvido em 1994. Usado para executar uma ampla variedade de tarefas. Uma modificação separada foi criada para cada um. O MRK-27-VT e o MRK-27-VU estão equipados com manipuladores e são projetados para trabalhos explosivos e o movimento de dispositivos explosivos. MRK-27-MA -
para trabalhos em condições de aumento da radiação . MRK-27-X - para trabalhos nas condições de infecção química; ele pode analisar o ar e colocar objetos quimicamente perigosos em um recipiente especial. MRK-27-GP - para verificações de terreno usando um analisador de gases. Uma variante do MRK-27-BT ("ponto de combate") é destinada às unidades de suporte de incêndio. Está equipado com uma metralhadora Pecheneg de calibre 7,62 mm, duas granadas de assalto RShG-2, dois lança-chamas RPM-A "Bumblebee" e seis lança-granadas KRAAG. Além disso, cada uma das modificações do robô pode realizar um reconhecimento visual. A plataforma base é executada em um chassi de seção única com geometria variável da lagarta. O manipulador tem cinco graus de liberdade. Além disso, pode ser equipado com um disjuntor hidráulico, um dispositivo de rolamento, ferramentas elétricas e um kit blindado de proteção. A massa da plataforma MPK-27 não ultrapassa 210 kg, comprimento - 112 cm, altura - 65 cm e funciona em superfícies com uma inclinação de até 20º. É equipado com baterias, que duram 4 horas de operação contínua. Executa tarefas em temperaturas de -30 ° C a +40 ° C.

- um sistema robótico móvel em um chassi de lagarta. É equipado com câmeras de televisão, um sistema de iluminação e um manipulador. Destinado à detecção e reconhecimento de dispositivos explosivos. Com um peso morto de 186 kg, o robô pode trabalhar em superfícies com uma inclinação de até 40º. Um gafanhoto é associado a uma história notável. Em junho de 1997, uma reação nuclear descontrolada começou no Centro Nuclear Federal Russo de Arzamas-16 devido a um erro. As pessoas foram evacuadas da instalação. Para impedir o segundo Chernobyl, eles enviaram um robô alemão
MF-4 da Telerob - ele teve que retirar um recipiente com plutônio-239. Mas ele não suportava a radiação e falhou. Um Kuznechik MRK-25 voou imediatamente para substituí-lo de Moscou, que retirou não apenas um recipiente com plutônio, mas também um robô alemão inoperante.
 MOBOT H-HV
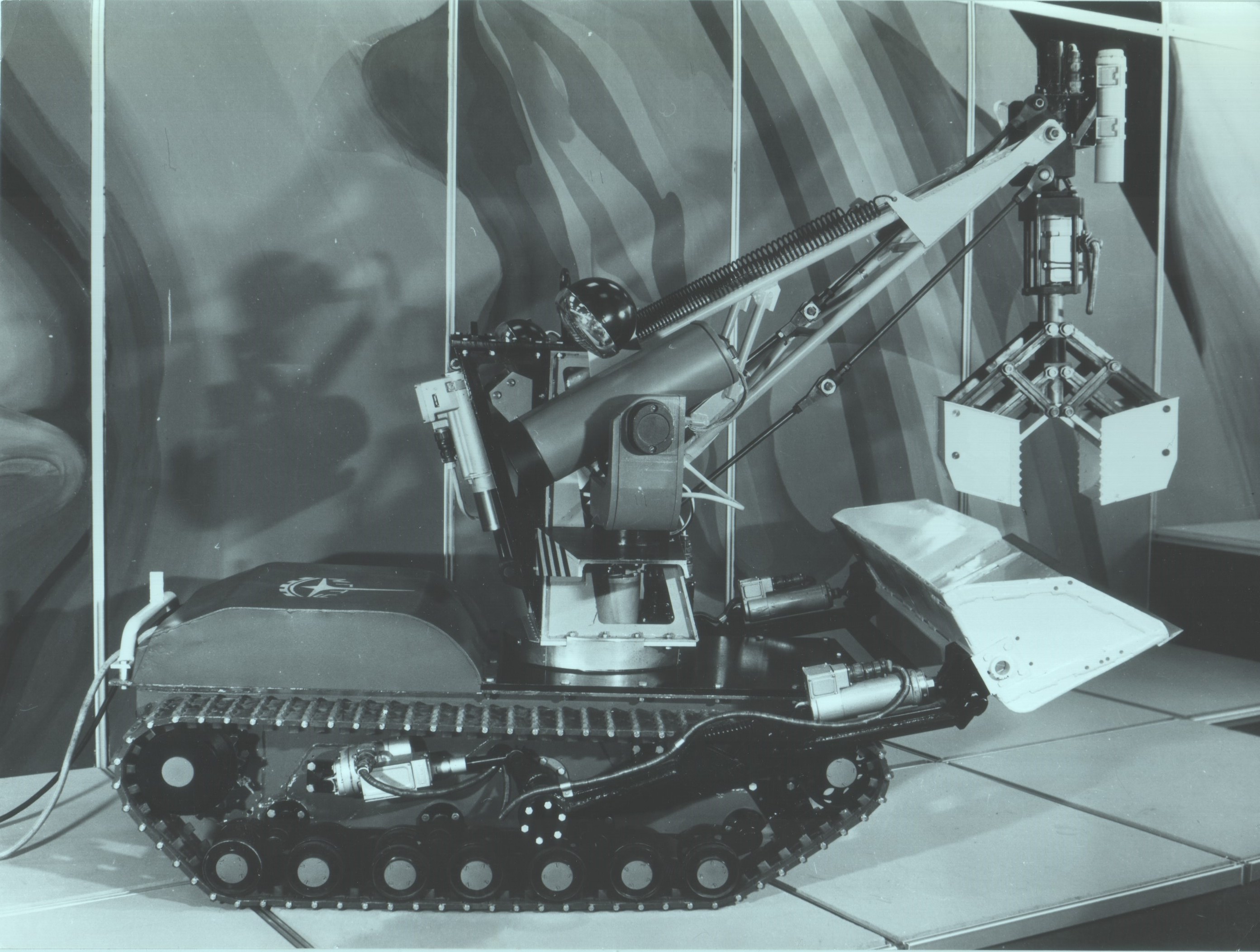
MOBOT H-HV - um robô móvel projetado para eliminar acidentes na usina nuclear de Chernobyl. "Mobot" significa "robô móvel", "H" significa "Chernobyl" e "XV" significa "tropas químicas". Foi sob as instruções do chefe de forças químicas do Ministério da Defesa da URSS em agosto de 1986 que este robô foi desenvolvido. Ele realizou reconhecimento dosimétrico, removeu detritos radioativos, desmontou os canos, ergueu a cofragem do telhado da zona “M”, colocou faróis e realizou outros trabalhos. Era equipado com um chassi da lagarta com trilhos de poliuretano, uma camada de cabos, um manipulador, um carregador frontal e duas câmeras de televisão. Mais tarde, foi finalizado e equipado com uma britadeira, um dispositivo de ancoragem, um novo braço de dois dedos e um sistema de comunicação acústica. O peso total do robô atingiu 430 kg.
Roboteam, Israel
A empresa foi fundada em 2009, está sediada em Tel Aviv e tem sede em Geitensberg (uma cidade nos EUA).
Projeta e fabrica plataformas robóticas multiuso para forças armadas, agências de aplicação da lei, forças especiais e missões de manutenção da paz. MTGR- um robô de tamanho pequeno projetado para engenhos explosivos de minas, reconhecimento, detecção de contaminação química, bacteriológica ou por radiação. É equipado com 8 câmeras, oferecendo uma visão de 360 graus, com duas câmeras localizadas diretamente no manipulador. Pode descer ladeira abaixo a 45 °. Velocidade máxima - 3,5 km / h, duração da bateria - 3 horas, peso morto - 9,4 kg. Carrega cargas de até 10 kg. O manipulador é capaz de levantar cargas de até 5 kg em um estado totalmente endireitado (neste caso, seu comprimento será de 49 cm). Opera em temperaturas de -20 ° C a +60 ° C. Controlado pelo operador a distâncias de até 500 m.
MTGR- um robô de tamanho pequeno projetado para engenhos explosivos de minas, reconhecimento, detecção de contaminação química, bacteriológica ou por radiação. É equipado com 8 câmeras, oferecendo uma visão de 360 graus, com duas câmeras localizadas diretamente no manipulador. Pode descer ladeira abaixo a 45 °. Velocidade máxima - 3,5 km / h, duração da bateria - 3 horas, peso morto - 9,4 kg. Carrega cargas de até 10 kg. O manipulador é capaz de levantar cargas de até 5 kg em um estado totalmente endireitado (neste caso, seu comprimento será de 49 cm). Opera em temperaturas de -20 ° C a +60 ° C. Controlado pelo operador a distâncias de até 500 m. A íris- robô leve do tipo "fundido" em uma plataforma com rodas. Pode trabalhar na areia, lama, água e pedras (o desenvolvedor fica calado sobre a neve). É equipado com duas câmeras PTZ e foi projetado para missões de reconhecimento. O robô pesa 1,85 kg e pode transportar 1 kg de carga. Possui 23 cm de comprimento e 11 cm de altura. Acelera até 5 km / he trabalha até 2 horas com uma única carga de bateria. É controlado remotamente - a uma distância de até 200 m do operador. Opera na faixa de temperatura de -20 ° C a +60 ° C.
A íris- robô leve do tipo "fundido" em uma plataforma com rodas. Pode trabalhar na areia, lama, água e pedras (o desenvolvedor fica calado sobre a neve). É equipado com duas câmeras PTZ e foi projetado para missões de reconhecimento. O robô pesa 1,85 kg e pode transportar 1 kg de carga. Possui 23 cm de comprimento e 11 cm de altura. Acelera até 5 km / he trabalha até 2 horas com uma única carga de bateria. É controlado remotamente - a uma distância de até 200 m do operador. Opera na faixa de temperatura de -20 ° C a +60 ° C. PROBOT- plataforma robótica para o terreno destinada ao transporte de mercadorias. Pode participar de operações de busca e salvamento ou evacuar os feridos do campo de batalha. Câmeras (incluindo visão noturna) são instaladas no robô, proporcionando uma visão de 360 graus. Em alguns casos, equipados com sensores para reconhecimento bacteriológico, químico e de radiação. A plataforma em si pesa 410 kg, mas pode transportar até 700 kg de carga útil. Ele acelera até 9,6 km / h e pode se mover autonomamente por até 8 horas seguidas. Suas dimensões são impressionantes: 150h120h60 ver.
PROBOT- plataforma robótica para o terreno destinada ao transporte de mercadorias. Pode participar de operações de busca e salvamento ou evacuar os feridos do campo de batalha. Câmeras (incluindo visão noturna) são instaladas no robô, proporcionando uma visão de 360 graus. Em alguns casos, equipados com sensores para reconhecimento bacteriológico, químico e de radiação. A plataforma em si pesa 410 kg, mas pode transportar até 700 kg de carga útil. Ele acelera até 9,6 km / h e pode se mover autonomamente por até 8 horas seguidas. Suas dimensões são impressionantes: 150h120h60 ver. TIGR- Um robô para qualquer clima projetado para trabalhos com sapadores. É equipado com um manipulador com cinco graus de liberdade, capaz de levantar 19 kg quando dobrado e 7 kg em estado estendido. É equipado com módulos para visão diurna e noturna (cinco câmeras coloridas e uma térmica), o que permite usá-lo como escoteiro. O fabricante afirma que o robô opera a temperaturas de -32 ° C a +49 ° C. O peso da plataforma é de 74 kg, comprimento - 91,2 cm, altura - 35,3 cm. É equipado com um sistema de reconhecimento humano que funciona sem erros durante o dia a uma distância de até 600 m e à noite - a uma distância de até 300 m.
TIGR- Um robô para qualquer clima projetado para trabalhos com sapadores. É equipado com um manipulador com cinco graus de liberdade, capaz de levantar 19 kg quando dobrado e 7 kg em estado estendido. É equipado com módulos para visão diurna e noturna (cinco câmeras coloridas e uma térmica), o que permite usá-lo como escoteiro. O fabricante afirma que o robô opera a temperaturas de -32 ° C a +49 ° C. O peso da plataforma é de 74 kg, comprimento - 91,2 cm, altura - 35,3 cm. É equipado com um sistema de reconhecimento humano que funciona sem erros durante o dia a uma distância de até 600 m e à noite - a uma distância de até 300 m.General Robotics, Israel
Empresa privada fundada em 2009. Ele se dedica à pesquisa, desenvolvimento e produção de plataformas robóticas para os mercados de defesa de diferentes países. DOGO é um robô de reconhecimento em miniatura equipado com armas letais. É usado não apenas no reconhecimento, mas também em operações de assalto, quando é necessário identificar e eliminar a ameaça. Para este efeito, está equipado com uma pistola Glock26 de 9 mm, calibre automático e um apontador laser. O peso do robô é de 10 kg. 8 câmeras com iluminação infravermelha são responsáveis pela revisão. Em 13 de novembro, a empresa lançou um módulo "menos letal" para o DOGO. Nele, em vez de uma pistola, uma lata de gás de pimenta é instalada para neutralizar o alvo.
DOGO é um robô de reconhecimento em miniatura equipado com armas letais. É usado não apenas no reconhecimento, mas também em operações de assalto, quando é necessário identificar e eliminar a ameaça. Para este efeito, está equipado com uma pistola Glock26 de 9 mm, calibre automático e um apontador laser. O peso do robô é de 10 kg. 8 câmeras com iluminação infravermelha são responsáveis pela revisão. Em 13 de novembro, a empresa lançou um módulo "menos letal" para o DOGO. Nele, em vez de uma pistola, uma lata de gás de pimenta é instalada para neutralizar o alvo. Burro- robô multifuncional dobrável para rápida implantação no chão. Projetado para reconhecimento, planejamento de rotas, transporte de carga. Graças à estrutura modular, ele pode ser equipado com um manipulador, o que o torna adequado para trabalhos com sapadores. Ele pesa 40 kg, pode transportar cargas de até 70 kg. Tem um curso silencioso graças a quatro motores elétricos - um para cada roda. Velocidade máxima - 16 km / h, alcance de cruzeiro - 40 km. Pode trabalhar em superfícies com uma inclinação de até 30º.
Burro- robô multifuncional dobrável para rápida implantação no chão. Projetado para reconhecimento, planejamento de rotas, transporte de carga. Graças à estrutura modular, ele pode ser equipado com um manipulador, o que o torna adequado para trabalhos com sapadores. Ele pesa 40 kg, pode transportar cargas de até 70 kg. Tem um curso silencioso graças a quatro motores elétricos - um para cada roda. Velocidade máxima - 16 km / h, alcance de cruzeiro - 40 km. Pode trabalhar em superfícies com uma inclinação de até 30º.Guardbot, EUA
Esta é uma empresa de engenharia americana localizada em Stamford, perto de Nova York. Especializada no desenvolvimento de sistemas robóticos esféricos anfíbios. No entanto, até agora ela criou apenas um produto - ele repete o nome da empresa. Segundo os criadores, o projeto Guardbot foi originalmente concebido para uma missão em Marte .https://youtu.be/v6IZTY4__ScGuardbot- um sistema esférico robótico cujo objetivo principal é procurar dispositivos explosivos e monitorar o território ou a área da água. No coração do motor está um mecanismo patenteado com um pêndulo. O robô se move alterando o centro de gravidade. Além disso, ele é capaz de trabalhar em terra, areia, água e neve. Velocidade de movimento em terra - até 20 km / h, na água - 6,5 km / h. O kit inclui câmeras diurnas e noturnas, um sensor de detecção de ADM, um scanner a laser. A estrutura pesa 26 kg, o diâmetro na parte fina é de 60 cm, na parte larga é de 91,5 cm, é equipado com dois motores elétricos e pode funcionar de forma autônoma por até 25 horas. Apesar da construção esférica, supera inclinações de até 30º. Funciona a temperaturas de -30 ° C a +40 ° C.A frente é a terceira parte.