Em uma publicação anterior, apresentei uma visão geral da história dos projetistas de engenharia da fischertechnik de 1965 a 2017 e agora, de acordo com os desejos dos leitores, publico uma visão geral do conjunto 524328 ROBOTICS TXT Discovery.

O Construtor 524328 é destinado a meninos e meninas interessados em mecânica, automação, programação, visão computacional ou, como dizem agora, em robótica.
A caixa de papelão contém peças mecânicas, motores, um controlador TXT programável, uma câmera de vídeo, o software ROBO Pro, instruções de montagem e um pequeno livro em formato PDF com material educacional.
Além disso, para trabalhar com o designer, precisamos de uma bateria 34969, que inclui uma bateria e um carregador NiMH.
No entanto, antes de passar para uma descrição detalhada do kit, sugiro que você se familiarize com a história do primeiro designer fischertechnik dedicado à robótica.
Antecedentes
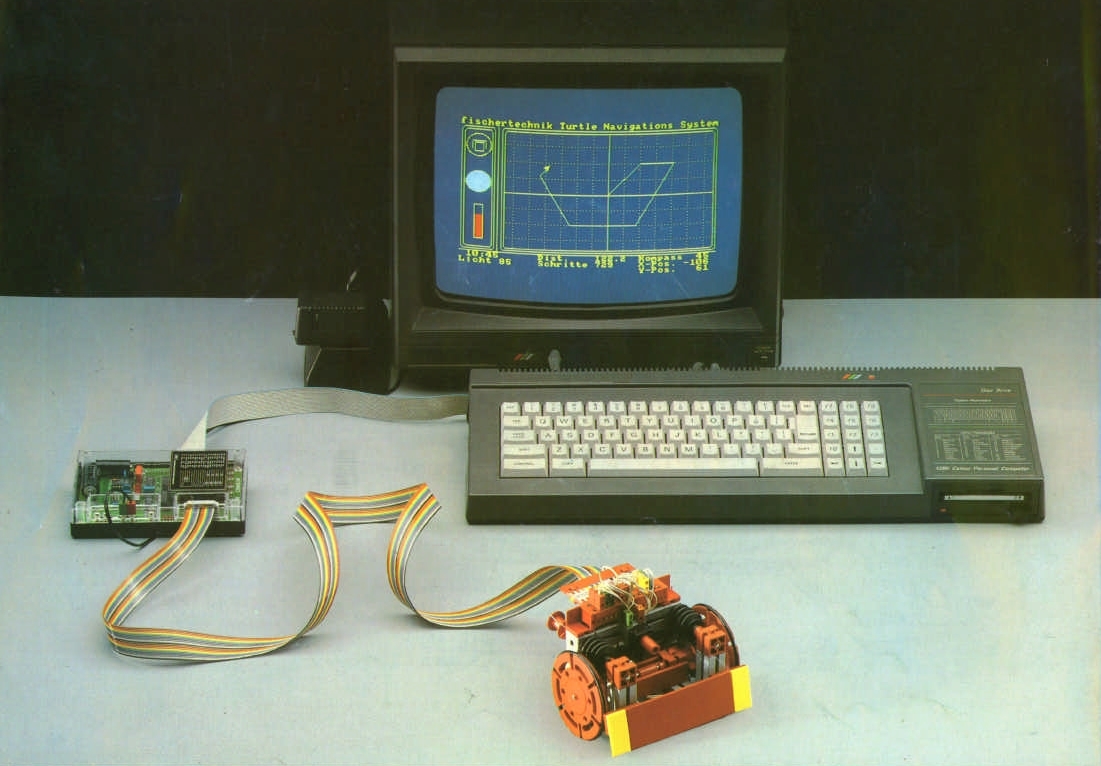
O primeiro designer de fischertechnik dedicado à robótica móvel apareceu em 1983 como parte de um projeto educacional experimental realizado na época no Reino Unido.
A empresa Economatics, trabalhando no projeto, chamou a atenção para o trabalho de um jovem cientista do MIT Seymour Peypert (1928-2016), que, prevendo a magnitude da revolução iminente no campo da tecnologia da computação, sugeriu começar a introduzir crianças em computadores desde tenra idade, usando o treinamento desenvolvido por sua equipe. linguagem de programação Logo .
Uma característica importante do Logo foi a interface amigável do ambiente de tempo de execução e a presença nesse ambiente de um objeto de controle virtual - uma “tartaruga” gráfica que, de acordo com os comandos do programa compilado, podia se mover pela tela do computador, deixando um rastro. A propósito, este trabalho do Sr. Peypert se transformou muitas vezes e sobreviveu até hoje na forma de um ambiente de programação de aprendizado chamado Scratch (falaremos sobre isso mais adiante).
Portanto, na solução proposta como resultado, foi proposto substituir a tartaruga virtual por um objeto muito real - um carrinho móvel. Assim, os alunos têm a oportunidade não apenas de se familiarizar com as tecnologias de programação, mas também de aprender o básico da robótica. Então, o primeiro conjunto da BBC Buggy apareceu:
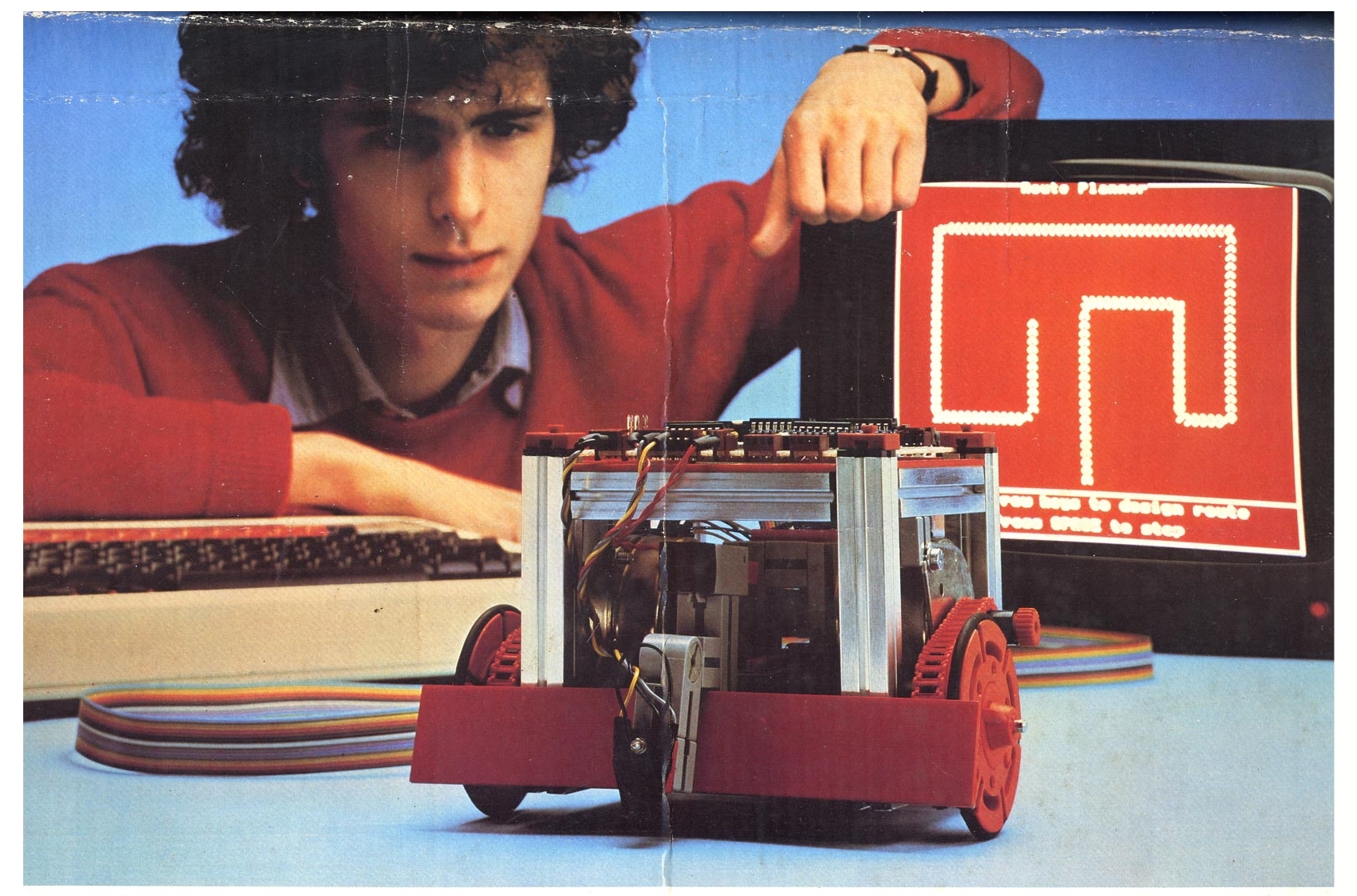
O kit incluía peças da fischertechnik para a montagem do carrinho, um painel de controle, uma transportadora com exemplos de programas de controle e instruções para tarefas de treinamento. A placa de controle foi conectada ao computador usando um cabo plano. Podemos dizer que foi um projeto conjunto fischertechnik + Economatics.
A Fischertechnik lançou o primeiro kit experimental de robô totalmente proprietário em 1987 - o 39502 Computing-Experimental. A partir do conjunto, foi possível construir várias variantes de máquinas automáticas e experimentar os algoritmos de controle de programação
Isso foi seguido pela próxima geração de designers e conjuntos adicionais para expansão funcional, mas essa é uma história que requer um artigo separado. Hoje, sugiro dar uma olhada no conjunto atual - 524328 ROBOTICS TXT Discovery set
524328 ROBOTICS TXT Discovery set
O Designer 524328 consiste em 310 peças, das quais 14 modelos para experimentos podem ser construídos. Além das instruções de montagem e de um CD com o software ROBO Pro, a caixa também contém espaços em branco para montar um campo de testes para testar robôs móveis. Tradicionalmente, o conjunto é acompanhado por um mini-livro em formato PDF, no qual você pode obter informações básicas no campo da robótica.
Aparência da embalagem:

Dentro da caixa de papelão, as peças são armazenadas em duas lojas de plástico em compartimentos separados. Se desejar, você também pode adquirir um sistema de armazenamento proprietário e usar substratos para classificar as peças que são facilmente cortadas com tesoura nas instruções de montagem.
Para uso em canecas e escolas, esse designer é embalado em recipientes de plástico Gratnells mais convenientes e duráveis e tem outro número de pedido - 533018.

Além de elementos estruturais simples, a lista de peças inclui dois servomotores com codificadores embutidos, um motor DC convencional com uma caixa de engrenagens externa, um fototransistor, um termistor, barramentos, LEDs e uma bola laranja para experimentos com um sistema de visão computacional:

(clicando na imagem - hirez)
Controlador programável TXT
A unidade de controle no designer 524328 é fabricada na forma de um computador compacto construído com base no processador ARM Cortex A8 e uma placa de entrada / saída integrada no ARM Cortex M3. Para interagir com o usuário, a unidade possui uma tela sensível ao toque colorida de 2,4 polegadas, 320x240 com luz de fundo. Além disso, o computador possui um alto-falante embutido e RTC com energia de reserva de uma bateria de lítio.
Controlador TXT:

O controlador TXT é executado no SO do kernel Linux. Se desejar, você pode inicializar seu sistema operacional a partir de um cartão de memória micro-SD plug-in.
A memória
- 128 MB de RAM DDR3
- 64 MB FLASH
- Micro sd
- Dispositivo de armazenamento em massa USB
Comunicações
As interfaces do controlador têm as seguintes interfaces:
- Bluetooth 2.1 EDR + 4.0
- WLAN 802.11 b / g / n
- Mini conector USB para conectar a um computador
- Conector USB-A com função de controlador host para conectar uma câmera USB, unidade flash USB e outros dispositivos.
- Fotodetector de infravermelho para o controle remoto do kit “kit de controle remoto”
- Interface I2C
- Interface UART
- Interface CAN
Entrada-saída
- Entradas universais: 8 peças digitais / analógicas 0-9V ou 0-5 kOhm
- Contando entradas: 4 peças (0-9V Fin <1 kHz)
- Saídas universais (PWM 9V / 0,25A): 8 peças
Por precaução, o interior do controlador TXT pode ser visto na figura abaixo:
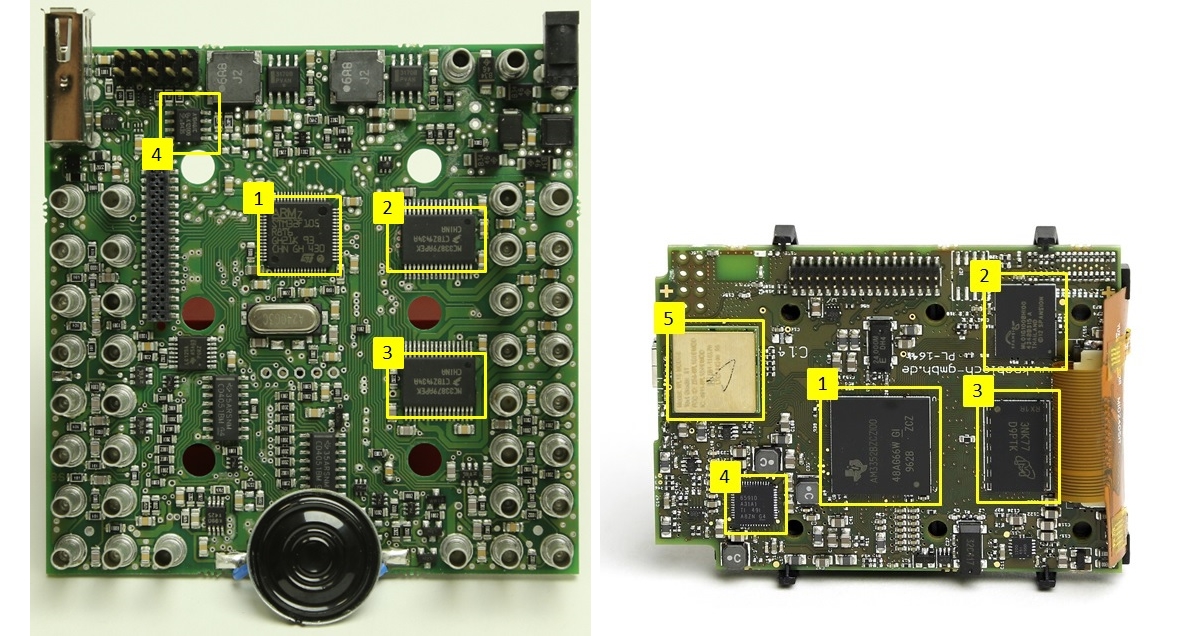
Na placa de circuito esquerda:
- ST STM32F105R8T6 - microcontrolador ARM Cortex-M3.
- MC33879 - driver de saída.
- MC33879 - driver de saída.
- TJA1040 - Driver serial do barramento CAN.
Na placa de circuito direita:
- TI AM3352B - Microcontrolador ARM Cortex-A8.
- Spansion ML01G100 - SLC NAND FLASH 64MB.
- Memória: DDR3L 1600 DRAM 128 MB
- TPS65910 - módulo de gerenciamento de energia.
- WL18MODGB (5) combo WiFi + módulo Bluetooth.
Uma característica importante deste kit é a disponibilidade de hardware e software para experimentos com visão computacional. Para isso, o kit possui uma câmera de vídeo com uma interface USB e o software da ferramenta ROBO Pro possui uma biblioteca de funções de visão computacional e um configurador para instalação e comissionamento.

A biblioteca de visão computacional contém as seguintes funções básicas para o processamento de quadros de vídeo:
- Cálculo do brilho médio de uma determinada região de um quadro de vídeo.
- Pesquise uma sequência de elementos raster da mesma cor para uma determinada região de um quadro de vídeo.
- Procure uma figura geométrica, cálculo de coordenadas e tamanhos.
- Um detector de movimento em uma região de um quadro de vídeo.
O configurador do subsistema de visão computacional incluído no software ROBO Pro:

Software de ferramentas ROBO Pro
Para desenvolver programas de controle para o controlador TXT, propõe-se o uso do software de ferramenta educacional ROBO Pro, que inclui um editor de diagramas de blocos de algoritmos, uma biblioteca de elementos básicos do programa, uma biblioteca de funções de aplicativos, ferramentas para comissionamento e controle remoto. O software ROBO Pro faz parte do kit de design. Separadamente, não é necessário comprá-lo.
Normalmente, a janela do editor se parece com a imagem abaixo:
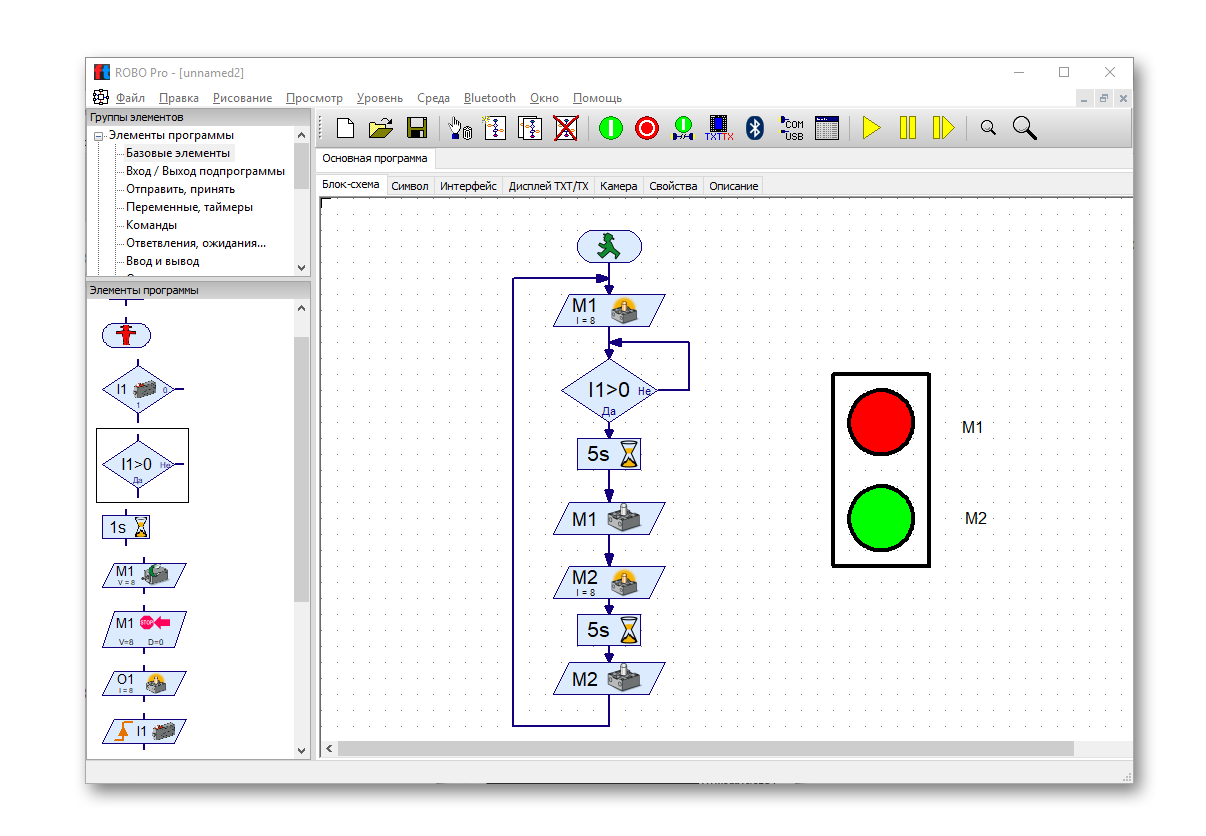
Os algoritmos de controle são compilados na forma de fluxogramas clássicos convencionais - como é habitual na literatura especializada em TI e na documentação técnica. Obviamente, você pode me perguntar: - e o Scratch? Por que está na documentação dos algoritmos MK ATMEL ou PLC SIMATIC, representados na forma de fluxogramas, e não na forma de circuitos temporários? Aqui, mal posso responder-lhe razoavelmente. No entanto, meu engenheiro interno está encantado com a oportunidade de usar uma ferramenta visual geralmente aceita de maneira natural para o primeiro conhecimento de crianças com tecnologias de controle automático.
Por precaução, os algoritmos da documentação técnica :

Os fluxogramas compilados no editor podem ser executados em dois modos - localmente na máquina instrumental ou remotamente, fazendo o download na máquina de destino. O primeiro método é conveniente para depuração. durante a execução do algoritmo, você pode usar a execução passo a passo e destacando a etapa atual do algoritmo.
Para usuários avançados, o ROBO Pro possui suporte a algoritmos multithread. A decomposição de algoritmos em procedimentos também é suportada e também existem elementos da interface do usuário que podem ser colocados diretamente nas folhas dos fluxogramas.
A biblioteca de elementos da interface do usuário possui um gravador / osciloscópio, medidores de discagem e campos para entrada e saída de valores digitais. Esse é um recurso muito importante para usuários iniciantes e avançados. A capacidade de registrar dados em tempo real e análises subsequentes simplifica bastante o estudo de novos algoritmos de controle e reduz significativamente o tempo de configuração.
É assim que a janela do editor se parece com um projeto mais complexo:
Conjuntos adicionais
A funcionalidade do kit 524328 pode ser expandida com kits adicionais da série ROBOTICS:
Eles diferem do construtor 524328 na ausência de um controlador TXT. Supõe-se que a transição para esses conjuntos ocorra após a solução de todos os problemas do conjunto 524328.
Exemplos de Projetos
Eu preparei vários vídeos que revelam algumas (mas de nenhuma maneira todas) as possibilidades do construtor padrão TXT Discovery definido sem detalhes adicionais. Todos os projetos dos exemplos estão no github . Ficarei feliz em responder suas perguntas nos comentários.
Dois algoritmos simples de semáforo:
Controle remoto usando elementos da interface do usuário e transmissão de vídeo no ROBO Pro:
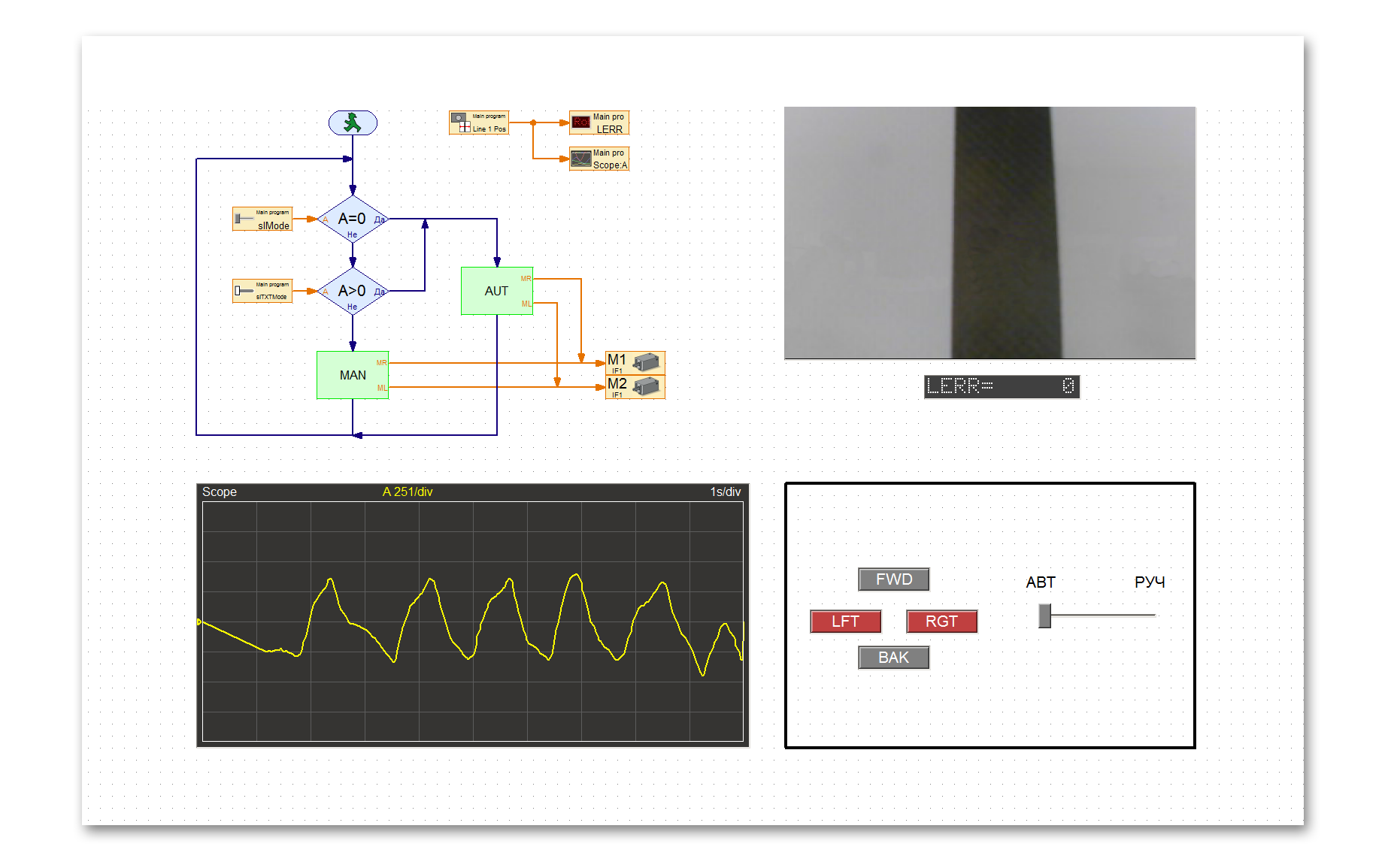
Controle automático do carrinho com feedback baseado em visão computacional. A lei proporcional da regulamentação é usada. O ganho do link proporcional KP = 3.5. Pode-se ver que o carrinho está se movendo instável ao longo da rota - ele balança e eventualmente sai da pista. Preste atenção ao registrador de parâmetros. Permite quantificar o valor da superação após a interrupção do movimento:
O motivo do comportamento instável é que, quando o carrinho gira, surgem forças de inércia que continuarão girando o carrinho, mesmo que a ação de controle do link proporcional seja zero. Como resultado, vemos como o carrinho desliza na linha e começa a girar na direção oposta - ocorrem oscilações no sistema dinâmico. Esse comportamento reduz bastante a qualidade do controle e, em alguns casos, pode levar à falha.
Para combater as forças de inércia, um elemento diferenciador é adicionado à estrutura do controlador, que forma um sinal proporcional à alteração na incompatibilidade na entrada do controlador. Defina o coeficiente KD = 6.0 e veja como o carrinho se comporta:
Agora, o robô passa constantemente pela pista. Preste atenção ao sinal verde no gravador - este é o sinal de saída do link diferencial do regulador, que ajuda a "desacelerar" a volta do robô quando ele retorna à trajetória.
Conclusão
Acima, dei vários exemplos do uso do conjunto 524328 ROBOTICS TXT Discovery para organizar exercícios práticos sobre a teoria do controle automático. Os exemplos dados eram muito secos e desprovidos de cálculos teóricos. Penso que em uma das publicações a seguir poderei compartilhar minhas melhores práticas em relação à organização de aulas práticas em automação usando construtores fischertechnik. Você estaria interessado nisso?
Como de costume, para os amantes de engenharia que dominaram toda a publicação, um desconto de 15% no código gktms1712 até 31/12/2017, inclusive na loja Pakpak . Glória aos robôs!
Referências
- A história da Buggy Training Turtle da BBC em 1983
- Seymour Papert - inventor da linguagem Logo
- Compilação personalizada do SO para o controlador TXT
- Arranhão para o controlador TXT
- Controlador Python para TXT