Este post descreve como em uma noite um foco de rastreamento para um espelho foi feito de merda e paus. Vídeo do que aconteceu:
Prefácio
Framboesas são redundantes aqui, sem dúvida. Mas se estamos falando de um dispositivo mais complexo no qual o foco de rastreamento é apenas uma das funções, por que não?
Não inventei nada de novo, apenas peguei e fiz em uma noite. Gostei do resultado, então quero compartilhar com a comunidade.
Mecânica, montagem
Para mim, a mecânica é sempre uma pedra de tropeço. Encontrar merda e paus debaixo dos braços que sejam compatíveis entre si, enquanto ainda permite que você atinja seu objetivo - pode ser difícil. Mas desta vez eu tive sorte.
O protótipo é mais ou menos assim:
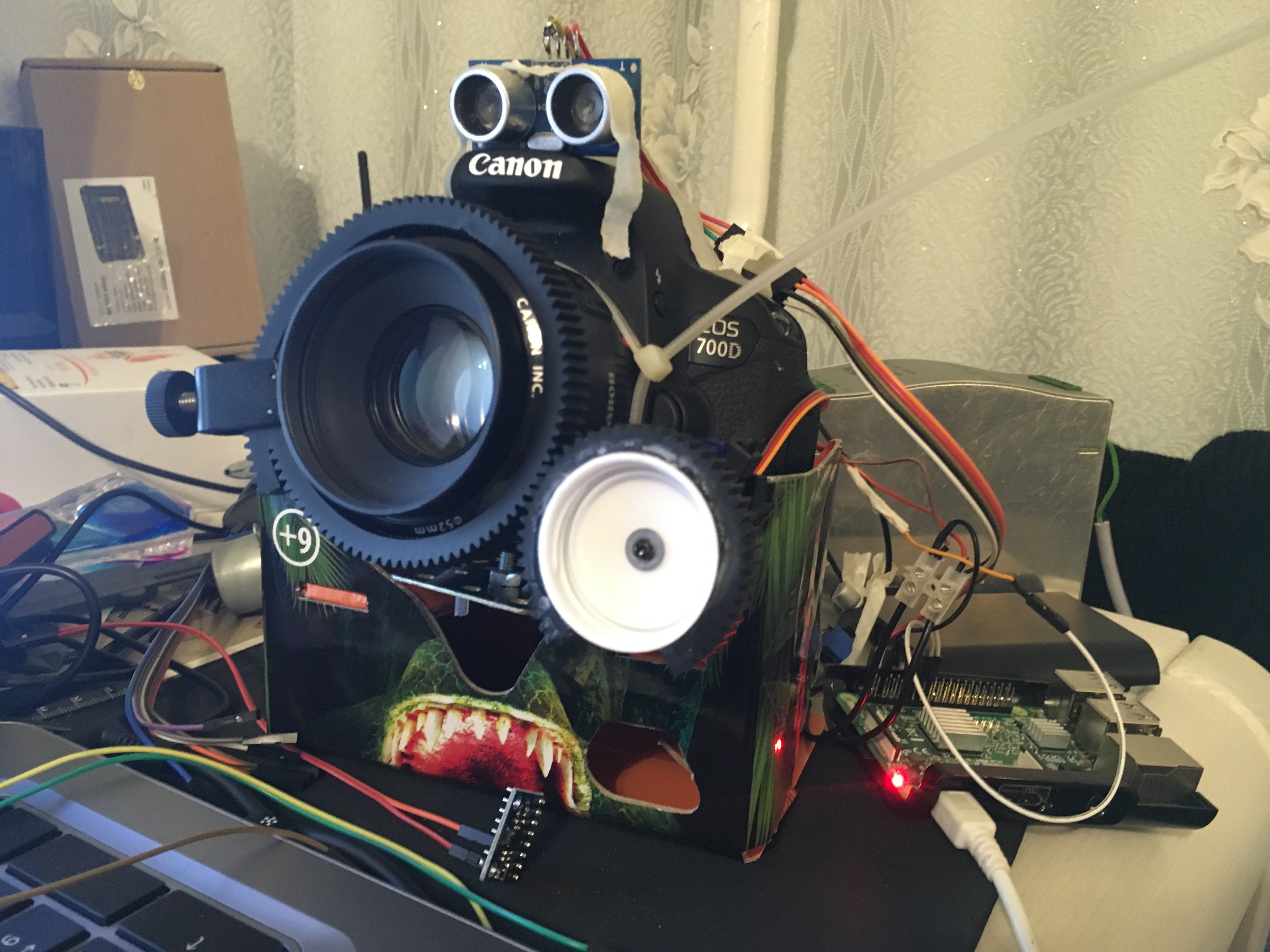
Como uma engrenagem no eixo do servidor, usei a tampa da caixa de leite na qual colei o restante do colar da engrenagem para a lente SLR. A tampa do leite, no meu caso, acabou sendo o diâmetro ideal para o ajuste em uma lente de 50 mm. Colei o “equipamento” com a ajuda do cianoacrilato com refrigerante em um dos braços do balancim fornecido com o servo e parafusei-o. Para conectar a estrutura à DSLR, você precisa de um parafuso com uma rosca de polegada. Encontrei um de um tripé de polvo.
Em geral, o design de alguma forma se incorporou na realidade:

Hoje é difícil sem mesas. A fita azul terminou e eu tive que montar o sensor na fita de papel.
Eletrônicos
Eu uso o Raspberry Pi 3 como meu cérebro.Ligo o servo com uma fonte de alimentação separada de 24VCC com um conversor DC-DC Step Down em um microcircuito LM2596 com saída de 7.2V.
O algoritmo de trabalho é simples de desonrar. Há feedback sobre a distância ao objeto do telêmetro ultrassônico HC-SR04, que é convertido em um ângulo de rotação do servo SG-90. Uma “engrenagem” é fixada no eixo dos servos, que gira a lente através da engrenagem do pinhão, definindo a distância focal.
Código
A conexão de um sensor ultrassônico é descrita
aqui . O controle servo é feito usando hardware PWM, tirei as configurações
aqui .
O código acabou sendo muito modesto, mas este é apenas o começo e não há limite para a perfeição.
Para determinar a correspondência do ângulo de rotação do servo com a distância focal, fiz várias medidas de calibração, como resultado, obtive uma dependência linear da área de interesse (40-70 cm), o restante foi levado como foco para o infinito.
Conclusão
Na minha opinião, mesmo os servidores SG-90 mais baratos são capazes de muito, uma haste de 1,2 kg / cm para um bebê assim e mesmo com essa velocidade - isso é legal, especialmente por um preço de 1,5 dólar. O mesmo vale para o telêmetro ultrassônico.
P.S. O servidor pode ser controlado separadamente do sensor, por exemplo, faça transições rápidas de um objeto para outro com diferentes distâncias focais. Além disso, para melhorar o sistema, você pode adicionar um filtro que compensará as deficiências na medição do sensor ultrassônico.