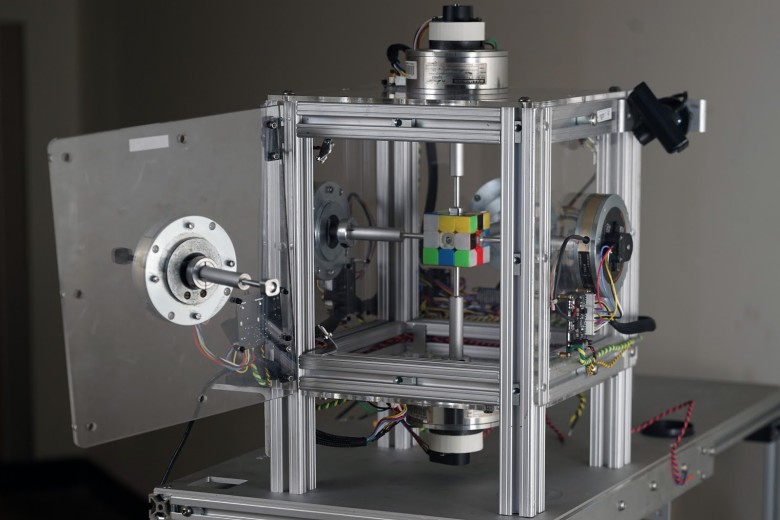
 Robô recordista desenvolvido no Laboratório de Robótica Biomimética do Instituto de Tecnologia de Massachusetts
Robô recordista desenvolvido no Laboratório de Robótica Biomimética do Instituto de Tecnologia de MassachusettsExistem jogos em que a IA derrota uma pessoa. Mas há tarefas em que uma pessoa geralmente não é considerada um concorrente. Aqui, os robôs competem apenas entre si. Montar um cubo de Rubik é uma tarefa típica.
Em novembro de 2016, o robô Infineon Technologies AG estabeleceu um novo recorde mundial na montagem do Cubo de Rubik:
montou em 0,637 segundos , quebrando o recorde anterior de 0,89 s. Mas os engenheiros europeus foram superados por estudantes
do Laboratório de Robótica Biomimética do Instituto de Tecnologia de Massachusetts. O robô deles completou a tarefa em
incríveis 0,38 segundos . Este é um momento "sujo", que inclui pressionar a tecla "Iniciar", reconhecimento de imagem e calcular a sequência de ações. A parte mecânica da tarefa em si levou aproximadamente 335 milissegundos. Resolvendo um problema em um
programa baseado em
min2phase e enviando instruções - 45 milissegundos.
O vídeo em tempo real foi gravado claramente, não para os olhos humanos. Para que os órgãos sensoriais imperfeitos de uma pessoa consigam consertar o processo de montagem e o cérebro humano lento para perceber o que está acontecendo, é necessário desacelerar a reprodução do vídeo pelo menos várias dezenas de vezes. A uma velocidade de 0,03x do real, algo se torna claro.
Os desenvolvedores têm certeza de que a máquina é capaz de lidar com mais rapidez, mas isso exige uma otimização cuidadosa do tempo dos movimentos mecânicos capturados em uma câmera de alta velocidade. No vídeo a uma velocidade de 0,03x (desaceleração de 33 vezes), é notável que após cada movimento as faces da inércia do cubo se movem para frente e para trás antes de finalmente parar. Assim, na realidade, uma rotação de 90 ° é concluída em cerca de 10 milissegundos, mas o robô faz o próximo movimento em 15 milissegundos. É nesta parte que o processo pode ser significativamente otimizado. Mas o robô quase dobrou o recorde mundial anterior quase duas vezes e, devido a erros de otimização, um cubo quebrou ou transistores de efeito de campo explodiram. Então, decidimos deixar como está. Mas, se necessário, os alunos podem "cortar" outros 100 milissegundos do registro.
O design usou os seguintes detalhes:
- 6 motores da série Kollmorgen ServoDisc U9 (quatro N9M4T com ímãs de neodímio e dois UD9-E - eles têm as mesmas características e desempenho). Dois deles foram retirados de um projeto antigo de um braço mecanizado , o restante foi comprado mais barato no eBay. Um sensor óptico US Digital 2000, também com o eBay, está conectado a cada mecanismo. Embora esses sensores forneçam resolução excessiva para esse experimento, eles conseguiram ser comprados por US $ 14 cada - novo, que é apenas um ótimo preço. É verdade que, para conectar os sensores aos motores, tive que mexer um pouco.

- 6 drivers de motor de 12 volts personalizados. Os controladores STM32F303K8 funcionam aqui. As placas são montadas em transistores de 100 volts. Mas, por alguma razão, a 60 volts, um deles explodiu duas vezes quando o cubo ficou preso. Firmware para controladores .

A sincronização / coordenação dos movimentos entre os seis controladores é realizada por uma placa lógica simples (AND Board), que recebe um sinal de cada mecanismo sobre o início / fim do movimento e envia um sinal sobre uma partida segura para o próximo mecanismo na fila.

- 2 câmeras PlayStation Eye gravam três faces cada. O vídeo é processado a 187 FPS no Linux com uma latência muito baixa em comparação com as webcams convencionais. Essas câmeras foram capazes de comprar por US $ 7. É verdade que havia um problema com uma clara diferença entre os quadrados vermelho e laranja, então os alunos trapaceavam um pouco - e pintavam os quadrados laranja com tinta preta.
- 1 Cubo de Rubik. Um dos mais baratos .
Não foi em vão que os cubos foram retirados baratos, porque durante o experimento várias peças quebraram (veja o vídeo). Os engenheiros escrevem que um dos truques para que tudo funcione bem é fornecer uma compactação realmente rigorosa de todos os detalhes do cubo. Se as peças se afastarem, as partes externas poderão virar para fora quando você tentar girar rapidamente os planos centrais.
A montagem de um cubo bem desmontado geralmente requer 19 a 23 etapas. Algumas soluções são mais rápidas que outras (a mais rápida consiste em 21 etapas). Portanto, se você tiver sorte, a tarefa será resolvida cerca de 30 milissegundos mais rápido.