 Modelos básicos de robolits tomados como base da primeira etapa do estudo (um total de 157 robolits foram estudados). As instâncias são classificadas da esquerda para a direita para aumentar os detalhes. O número na escala corresponde ao número de elementos ausentes, como sobrancelhas ou boca. Ilustração: Universidade de Washington
Modelos básicos de robolits tomados como base da primeira etapa do estudo (um total de 157 robolits foram estudados). As instâncias são classificadas da esquerda para a direita para aumentar os detalhes. O número na escala corresponde ao número de elementos ausentes, como sobrancelhas ou boca. Ilustração: Universidade de WashingtonNa conferência internacional ACM / IEEE sobre a interação de pessoas com robôs em março de 2018 (HRI 2018)
, são apresentados os resultados de um estudo em larga escala “Caracterizando o espaço de design das faces de robôs renderizados”. É imediatamente difícil para uma pessoa não iniciada entender do que se trata. Que outra renderização?
O fato é que, recentemente, os criadores de robôs humanóides (e não apenas) instalam telas de computador em vez de faces de ferro. Na tela, o robô pode demonstrar toda a gama de sentimentos - sorria ou sobrancelhas sobrancelhas franzidas - e para isso você não precisa montar dezenas de servomotores caros para imitar expressões faciais.
Assim, os cientistas de Washington liderados por Alisa Kalegina estudaram pela primeira vez em detalhes como as pessoas reagem às mudanças nas características da face de um robô.
A base do estudo foram os rostos de 157 robôs encontrados na Internet. Para cada amostra foram prescritas as características apropriadas: presença de um ou outro elemento; cor do item; tamanho, forma e localização de cada elemento no rosto. Os pesquisadores também registraram várias outras características úteis, como o nome do modelo do robô e o país do design.
As estatísticas coletadas já nesta fase são muito curiosas. Por exemplo, todo terceiro robô do mundo tem um rosto preto. A maioria dos robôs tem bocas, mas sem nariz, bochechas ou sobrancelhas. O formato dos olhos mais popular é redondo. Apenas 10% dos robôs têm a mesma forma que os humanos. Dois grupos distintos também apareceram:
faces no estilo Baxter e
faces no estilo EVE .
Na primeira etapa, cada um dos 50 entrevistados mostrou as faces de 12 robôs selecionados e solicitou a avaliação de seis parâmetros de face em uma escala de cinco pontos, além de indicar a profissão mais adequada para esse robô.
Os entrevistados mais “amigáveis” consideraram os robôs Yumi, FURo-D, Buddy e Datou. Os menos amigáveis são Jibo e Gongzi.
Os mais inteligentes ficaram impressionados com o amigável FURo-D e o hostil Gongzi. Os mais estúpidos são Sawyer, Buddy e Datou.
Em termos de confiança, o FURo-D venceu e Gongzi foi o menos confiável. Em geral, com relação ao robô Gongzi, muitos entrevistados expressaram uma opinião subjetiva de que ele tem uma "cara de mau".
No estágio seguinte, os pesquisadores tentaram descobrir quais sinais específicos influenciam a impressão de um rosto robótico e como uma mudança nesses sinais muda a percepção de uma pessoa.
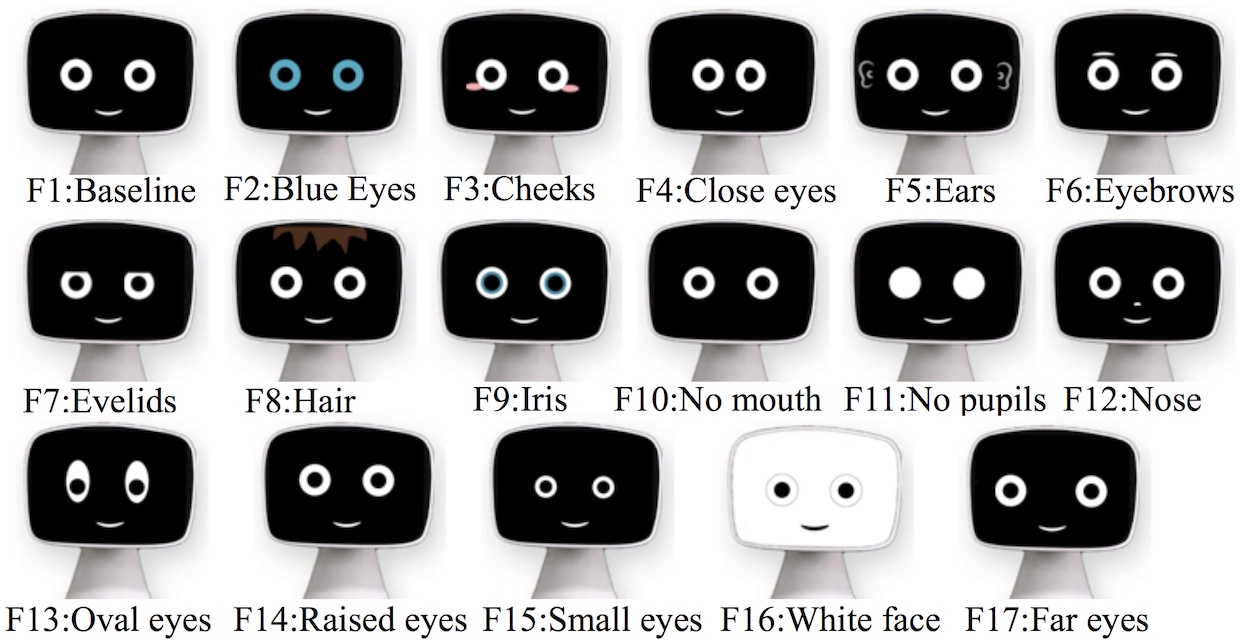 O conjunto de indivíduos utilizados na segunda fase do estudo. A pessoa no canto superior esquerdo é aceita como base ou "pessoa do meio". Todas as outras pessoas diferem ligeiramente da base devido a uma alteração em um atributo. Ilustração: Universidade de Washington
O conjunto de indivíduos utilizados na segunda fase do estudo. A pessoa no canto superior esquerdo é aceita como base ou "pessoa do meio". Todas as outras pessoas diferem ligeiramente da base devido a uma alteração em um atributo. Ilustração: Universidade de WashingtonComo se viu, nenhum dos rostos alterados mostra visivelmente mais amizade do que a pessoa base. Houve uma diminuição acentuada da simpatia em pessoas com a boca ausente, pupilas ausentes e pálpebras levemente caídas na frente dos olhos.
O sinal de "sobrancelhas" é mais correlacionado com inteligência. Nesse caso, as sobrancelhas são projetadas para serem baixadas próximas aos olhos, de modo a não criar o efeito do rosto de uma criança. Nesse caso, ao avaliar a inteligência, o efeito oposto é observado. Um efeito estúpido semelhante é criado por pessoas com olhos fechados, sem boca e bochechas (F3).
Os resultados do estudo deixam claro como os designers devem projetar o rosto dos robôs, dependendo de suas responsabilidades. Por exemplo, se você estiver criando um guarda de segurança, verifique se ele não tem boca no rosto e pálpebras. Os robôs dos atendentes se beneficiariam de ter sobrancelhas, e os robôs da indústria do entretenimento deveriam ter mais detalhes do que outras máquinas humanóides.
O artigo científico foi
publicado na coleção de materiais da conferência HRI 2018, realizada de 5 a 8 de março de 2018 (doi: 10.1145 / 3171221.3171286).