O BigDog foi o primeiro robô do Boston Dynamics a se tornar amplamente conhecido. De muitas maneiras, foi ele quem “fez o nome” do criador da empresa. Um robô militar, abandonado pelos militares, e o primeiro robô do Boston Dynamics, que os desenvolvedores chutaram a câmera.
Agora o projeto pôs fim a isso, mas tornou-se a base para desenvolvimentos subseqüentes da empresa - Cheetah e o novo Spot, vídeos com os quais rapidamente se tornaram virais.
Hoje tentaremos entender o dispositivo BigDog pelas palavras de seus desenvolvedores. Os autores publicaram o artigo original em 2008, mas ele ainda não foi traduzido para o russo. Ele fala sobre os principais componentes do robô e os algoritmos que coordenam sua marcha. O objetivo do projeto BigDog é criar dispositivos autônomos com pernas com a capacidade de se mover em terrenos acidentados. Eles devem ser superiores aos veículos com rodas e com esteira existentes. Um sistema ideal deve ir aonde uma pessoa ou animal pode ir, correr por horas e carregar peso na forma de seu próprio combustível e carga útil. Ela é inteligente o suficiente para atravessar o terreno com o mínimo de intervenção e controle humano.
Os robôs criados pelo BigDog ajudaram a dar vários passos para alcançar esses objetivos, embora ainda haja muito trabalho pela frente.
O BigDog possui sistemas integrados que fornecem energia, energia, coleta de dados ambientais, monitoramento e comunicação. A energia é fornecida por um ICE de dois tempos, resfriado a água, que fornece cerca de 15 hp. Ele aciona uma bomba que fornece óleo hidráulico através de um sistema de filtros, coletores, baterias para os atuadores das pernas robóticas. Os atuadores são cilindros hidráulicos de baixo atrito, controlados por servoválvulas de dois estágios. Cada atuador possui sensores que monitoram a posição e a força das articulações. Cada perna possui 4 atuadores hidráulicos que alimentam as articulações. Um trocador de calor montado no corpo do BigDog resfria o óleo e um radiador resfria o motor para uma operação estável.
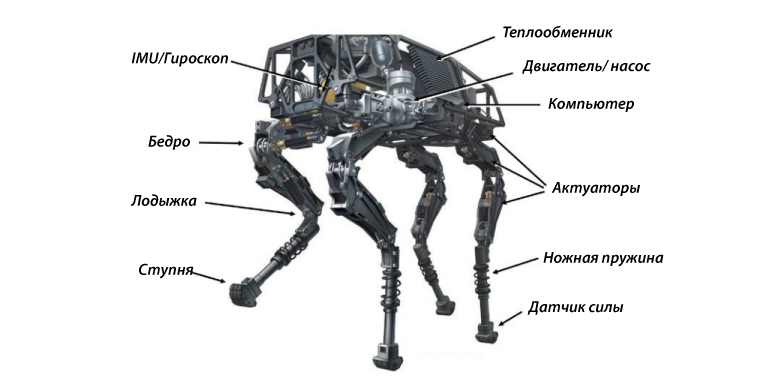 Principais elementos de design do BigDog
Principais elementos de design do BigDogO computador de bordo controla o comportamento do BigDog, controla os sensores e é responsável pela comunicação com o operador remoto. Ele também registra uma grande quantidade de dados de engenharia para análise de desempenho, análise de erros e suporte operacional.
O BigDog possui cerca de 50 sensores. Os sensores inerciais medem a posição e a aceleração do corpo, os sensores articulares medem o movimento e a força dos atuadores articulares. O computador de bordo processa as informações de todos esses sensores para fornecer uma estimativa de como o robô está se movendo. Outro grupo de sensores controla a homeostase do BigDog: pressão hidráulica, vazões e temperatura, velocidade do motor, etc.
O computador de bordo executa funções de monitoramento de nível baixo e alto. Um sistema de baixo nível controla a posição dos servos e a nutrição nas articulações. Alto nível coordena a posição das pernas para regular a velocidade, posição e altura do corpo durante o movimento. Também rastreia o poder da interação com o solo para garantir um movimento constante.
O BigDog tem muitas opções de movimento. Ele pode se levantar, agachar-se, andar com uma marcha rastejante, andar, levantando apenas um pé de cada vez, trotar e galopar. A velocidade com uma marcha de rastreamento é de 0,2 m / s, para um lince - 1,6 m / s, para corrida - 2 m / s (em condições de laboratório, o indicador de velocidade máxima era de 3,1 m / s). Além disso, o robô pode saltar 1,1 metros.
O BigDog geralmente é controlado por um operador humano que trabalha com uma unidade de controle conectada ao robô via rádios IP. O operador fornece controle de alto nível de movimento e velocidade. Ele também pode pedir ao robô que ligue ou desligue o motor, levante-se, sente-se, ande ou corra.
[Sobre como o algoritmo de navegação autônomo do robô foi desenvolvido, você pode ler aqui ]Um sistema de visão estéreo e o lidar foram integrados ao robô. O sistema de visão estéreo desenvolvido pelo Jet Propulsion Laboratory consiste em um par de câmeras estéreo, um computador e software visual. É usado para obter uma forma 3D da paisagem na frente do robô e encontrar seu caminho. O Lidar é necessário para que o BigDog possa seguir uma pessoa sem comandos adicionais do operador.
Controle da marcha
Para se mover na velocidade humana, o BigDog usa uma marcha trotada dinamicamente equilibrada. Ele equilibra usando velocidade e aceleração laterais, determinadas pelo comportamento percebido das pernas em combinação com sensores inerciais.
O sistema de controle BigDog coordena as reações cinemáticas e de terra do robô, respondendo aos comandos posturais básicos. O controlador distribui a carga entre as pernas para otimizar sua capacidade de carga. A carga vertical nos membros é mantida o mais uniforme possível, e as pernas individuais geram reações no solo direcionadas aos quadris para reduzir o atrito.
O algoritmo de coordenação da marcha responsável pela comunicação entre os membros desencadeia o movimento das pernas. É coordenado por um modelo de perna virtual. O esquema geral de controle de caminhada do BigDog pode ser representado da seguinte maneira:
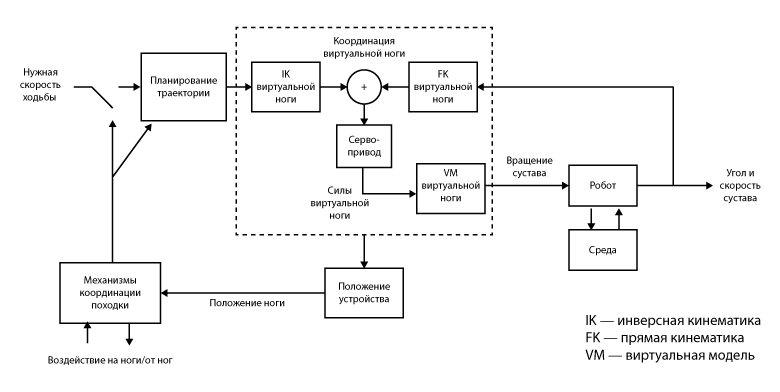 Padrão de controle de caminhada do BigDog
Padrão de controle de caminhada do BigDogDesenvolvemos algoritmos de caminhada para terrenos acidentados e os testamos em modelagem física antes de testar em um robô. Um robô simulado caminha pelas encostas em um ângulo de até 60 graus. O algoritmo de seu movimento varia de acordo com a superfície plana ou em uma inclinação. Além disso, leva em conta obstáculos inesperados no caminho, como pedras ou poços.
Modelagem física foi usada para desenvolver algoritmos de marcha.O sistema de controle utiliza informações do sensor articular para determinar se as “pernas” estão atualmente no chão e determinar a carga em cada membro e acionamento. O algoritmo de estado controla a posição do corpo, coordenando a cinemática dos membros com as forças de reação das pernas em contato com o solo. O algoritmo de estado implementa o movimento correto das pernas em uma superfície irregular. Isso permite controlar as voltas, o passo e a altura do corpo em relação ao solo, permitindo que o BigDog se adapte às mudanças da paisagem sem sensores com um nível mais alto de percepção do terreno.
O BigDog se adapta ao terreno de duas maneiras. Ele regula a altura e a atitude do corpo em relação à paisagem e controla onde colocar os pés. Ao subir e descer das encostas, o corpo do robô se inclina. As encostas íngremes (mais de 45 graus) que o robô supera, corrigindo a marcha e usando passos menores.
No final do artigo, os autores agradecem a todas as 23 pessoas da equipe BigDog e compartilham seus planos para o futuro: fortalecer o corpo do robô, torná-lo autônomo e silencioso (o motor a gasolina faz barulho como uma motocicleta). O último ponto, como o tempo mostrou, permaneceu um problema sério.Mais sobre robótica em robo-hunter.com: