Os círculos de robótica são definitivamente um sucesso nos dias de hoje. Lego, arduino, arranhões e muito mais estão disponíveis para crianças modernas (tenho certeza que muitos, como eu, têm inveja do garoto atual a esse respeito). Como professor de robótica, decidi compartilhar algum material que acumulei ao longo de alguns anos de trabalho, a saber, um robô bastante simples e várias atividades com ele.
Uso essas unidades na sala de aula para explicar às crianças os princípios de operação do motorista do motor, sensor de linha e telêmetro. As crianças que são surpreendidas pelo estudo deste robô já desaprendem como regra há um ano e têm idéias mínimas sobre Arduino, motores e engenharia elétrica em geral. Existem muitos projetos na Internet com esses componentes, mas duas coisas me motivaram a desenvolver minha máquina - eu queria usar um compartimento para 4 pilhas AA e poder conectar com segurança quase qualquer sensor ao robô (existem vários orifícios de montagem adicionais para isso no design).

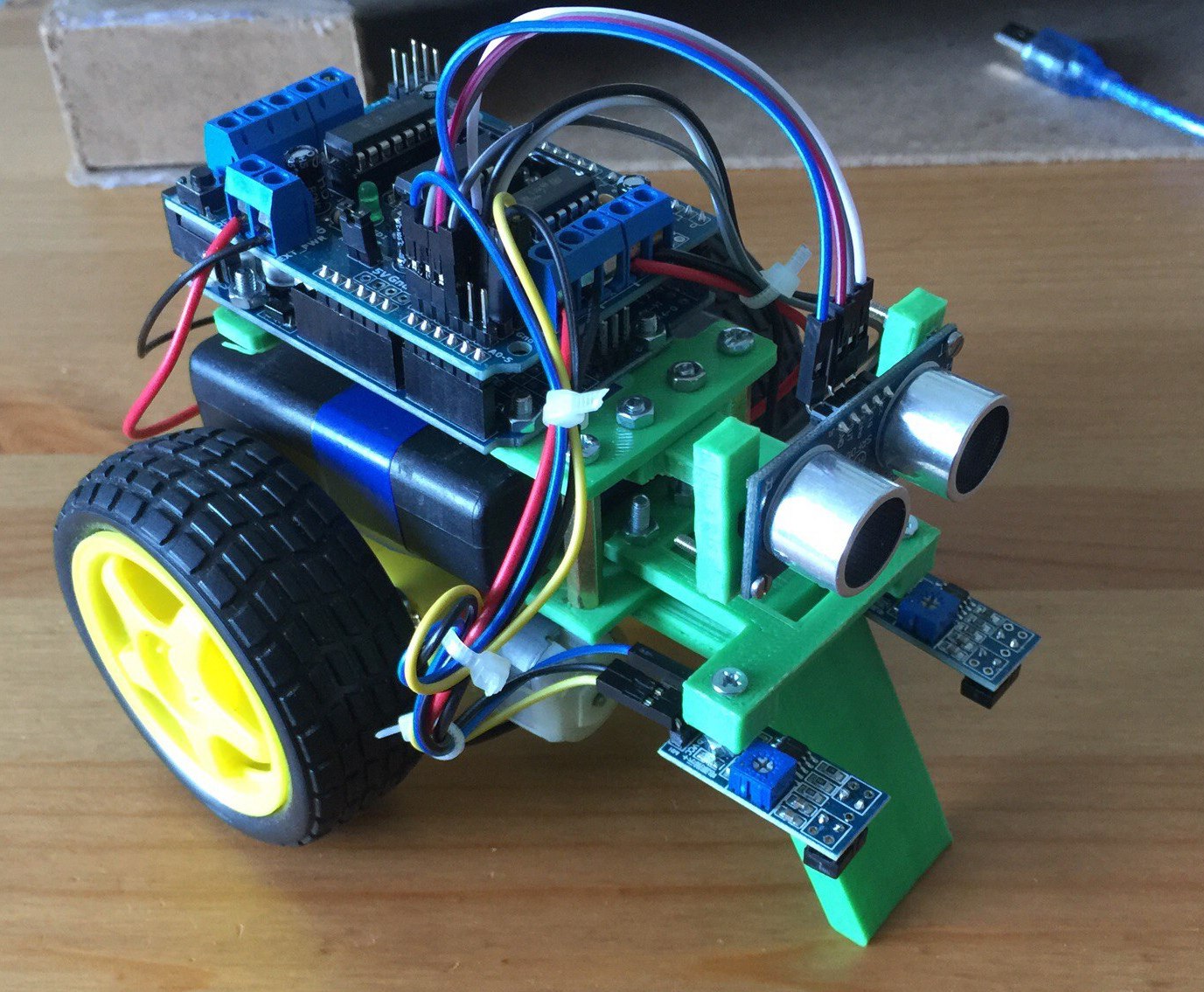
O robô é controlado por uma placa Arduino Uno com blindagem do motor l293d, a partir dos sensores que instalei o telêmetro HC-SR04 e dois sensores de linha tcrt5000 (com saída digital e analógica).
O corpo do robô consiste em 3 partes (sem contar as montagens opcionais para sensores), impressas em uma impressora 3D. Para montagem, você precisará de fixadores M3, descrevi todos os elementos necessários em um documento que contém arquivos para uma impressora 3D.
O robô é programado, tanto no ambiente padrão do Arduino IDE (crianças mais velhas) quanto no programa miniBloq (para grupos mais jovens). Para o ambiente padrão, é usada a biblioteca AFMotor, necessária para trabalhar com a proteção dos drivers do motor. No miniBloq, para funcionar, você precisa selecionar o equipamento do robô “ta-bot v1” usando o mesmo driver na seção.
Com um telêmetro e sensores de linha a bordo, o robô é adequado para participar de competições em várias disciplinas, mas foi criado apenas para treinamento, não funcionará para ganhar prêmios.
Classes que podem ser realizadas com ele:
- Trabalhe com o motorista do motor. Rotação da roda em diferentes direções e em diferentes velocidades.
- Manobras simples. Cavalgando em círculo, cavalgando na figura oito (nessas classes, em regra, você deve escolher o tempo e a velocidade necessários muitas vezes para obter uma determinada figura).
- Sensor de linha. O princípio do trabalho. Transmissão de leituras de sensores para um computador (monitor de porta).
- Montando em uma linha com um sensor de linha.
- Montando uma linha com dois sensores de linha.
- Range finder. O princípio do telêmetro. Transferência do telêmetro para o computador.
- Andando pela sala com um telêmetro. O robô avança para encontrar um obstáculo, assim que se aproxima da parede, vira.
- Procure o inimigo (como no robosumo). Dois robôs são colocados em um círculo e começam a girar no lugar, procurando o inimigo com um telêmetro.
Na pasta com os detalhes, você também pode encontrar várias classes concluídas na lista acima.