
Eu continuo o tópico da imitação de levitação. Para quem ainda não leu a primeira publicação, pode seguir o
link . Em contraste com a primeira publicação, neste artigo, demonstrarei a pseudo-levitação de bolhas de ar na água.
No início do videoclipe, são mostradas todas as variantes de pseudo-levitação que testei e, a partir de
3:17 minutos, começam breves explicações. Quem está cansado de assistir à demonstração pode ir diretamente para a parte explicativa.
Esta demonstração usa o mesmo estroboscópio, mas um pouco simplificado, pois não possui um eletroímã. Em vez de um eletroímã, desta vez eu uso uma bomba de aquário pulsada. Que bombeia ar. A bomba opera a partir de uma rede de 220V a uma frequência de 50Hz. A bomba é conectada através de um diodo retificador. Assim, o diodo passa apenas por meio-ciclo positivo.
Para sincronizar as bolhas com flashes de luz, o estroboscópio deve estar sintonizado em qualquer frequência múltipla de 12,5-25-50-75-100 Hz. Consequentemente, com um aumento na frequência do estroboscópio em duas ou mais vezes, a distância entre as bolhas também diminui em um múltiplo. No vídeo, você pode ver um fragmento aos
57 segundos , no qual a frequência é aumentada em relação a 50 Hz e as bolhas são mantidas a uma distância muito curta uma da outra.
Esquema estroboscópico
Eu uso o esquema do
arduino do projeto anterior porque é mais fácil e rápido para mim. E para aqueles que desejam repetir o projeto sem o arduino, eles podem fazer o cronômetro habitual no chip NE555.
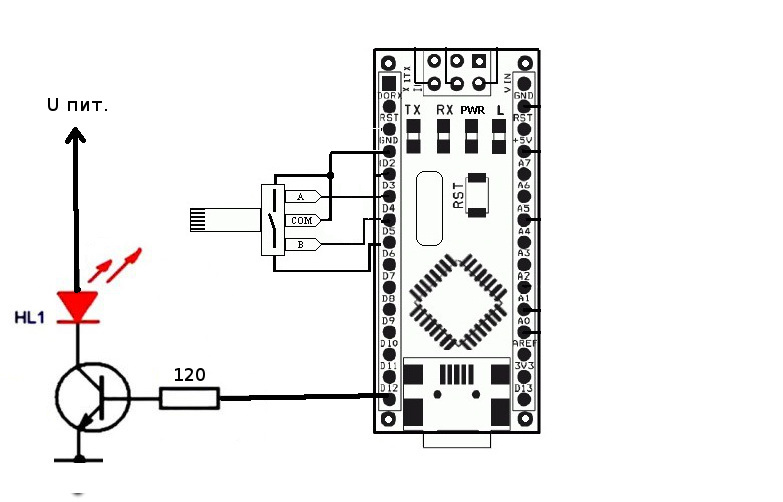
Componentes utilizados no circuito:
Arduino nano - 1 unid.
Codificador - 1 pc.
Placa de desenvolvimento - 1 pc.
Lâmpada LED antiga - 1 pc.
Transistor KT972 - 1 unid.
Bomba de aquário - 1 unid.
Resistor de 120 ohm - 1 pc.
Explicações de acordo com o esquema:
O elemento LED, como eu disse, foi usado a partir de uma lâmpada LED com defeito. Em que o motorista não funcionou.
De acordo com a tensão de queda no elemento LED, descobri que sua tensão operacional é de 48V. Para reduzir a tensão de alimentação do elemento para 24 V, dividi o elemento em duas partes, cortando uma faixa e paralelizando essas duas matrizes de LEDs.
Como o elemento LED é alimentado por pulsos curtos e a tensão de alimentação é igual à tensão de queda nos LEDs, não limitei a corrente. Porque o elemento LED ainda funciona no modo não saturado.
O elemento LED é comutado por uma chave no transistor KT972. Este é um transistor composto, ou também é chamado de transistor Darlington, um par Darlington. Foi possível usar o MOSFET, mas para uma corrente tão pequena, há muito CT972.
O resistor na base do transistor limita a corrente de saída do controlador para que a saída do controlador não falhe. De acordo com a folha de dados, essa corrente não deve exceder 40mA. Um cálculo aproximado, sem levar em conta a queda de tensão na junção do transistor, será o seguinte: 5V / 0,04A = 125 Ohms. Como essa classificação não existe na linha de resistência, colocamos 120 Ohms. Se considerarmos a queda de tensão na junção do transistor, a corrente ainda não excederá 40mA.
Um codificador opera usando apenas uma interrupção do controlador INT1. Ao mesmo tempo, não há necessidade de lidar com a rejeição de contatos no hardware, pois o código lida com isso, sem atrasos desnecessários.
Quando o codificador gira sem pressionar, a frequência muda. Por padrão, a frequência no código é 50Hz. Quando o codificador é girado pressionando, a duração do flash estroboscópico muda. A bomba, como escrevi acima, funciona com AC 220V a uma frequência de 50 Hz.
Software estroboscópio
Não editei o código do último projeto, deixei tudo como está
Code for Arduino// #define CLK 3 // Clock INT1, #define DT 4 // #define SW 5 // switch #define Min 1 // #define Max 20000 // #define led_pin 12 // #define coil_pin A0 #define step_freq 1 // 0,1 #define step_timelght 100 // volatile int freq = 500; // 10, volatile uint32_t paus, time_light=2000; // uint32_t oldcount; boolean DT_last; // void setup() { pinMode(CLK,INPUT_PULLUP); // Clock INT1, pinMode(DT, INPUT_PULLUP); // pinMode(SW, INPUT_PULLUP); // pinMode(led_pin, OUTPUT); // pinMode(coil_pin, OUTPUT); attachInterrupt(1, encoderTick, CHANGE); // DT_last = digitalRead(CLK); // CLK } void loop() { paus=5000000/freq; digitalWrite(coil_pin, 1); digitalWrite(led_pin, 1); oldcount = micros(); while( (micros() - oldcount) < time_light){} // digitalWrite(led_pin, 0); while( (micros() - oldcount) < paus){} // digitalWrite(coil_pin, 0); oldcount = micros(); while( (micros() - oldcount) < paus){} // } // void encoderTick() // { uint8_t DT_now = digitalRead(CLK); // CLK if (DT_now != DT_last && digitalRead(SW)) // , { if (digitalRead(DT) != DT_now) // DT CLK, { if( freq < Max ) freq += step_freq; // } else { // DT CLK, if( freq > Min ) freq -= step_freq; // } } else if (DT_now != DT_last && !digitalRead(SW)) // { if (digitalRead(DT) != DT_now) // DT CLK, { if( time_light < paus ) { time_light += step_timelght; } // } else if( time_light > 0 ) time_light -= step_timelght; // / } DT_last = DT_now; // CLK }
Vou explicar como funciona
Uma bomba com uma frequência de 50 Hz cria pressão no tubo, liberando uma porção de ar no pulso. O ar doseado na forma de bolhas sai do tubo com a mesma frequência de 50 Hz e sobe.
Ao ajustar o estroboscópio para uma frequência múltipla, uma frequência de 50 Hz, veremos bolhas suspensas na água, pois as frequências serão sincronizadas. E as bolhas se substituirão, no momento inativo do estroboscópio. Nossos olhos não perceberão essa falsificação, pois captura apenas a cena iluminada. Por razões físicas, o olho só pode ver a luz refletida e o que faz no escuro, não vê.
Conclusão
Espero que você tenha gostado deste artigo e, se quiser ver novas publicações e não sentir falta delas, assine. É possível que, no futuro próximo, eu ainda colete levitas mini-chuvas. E eu vou te mostrar o que eu fiz.
Se você ainda tiver dúvidas, pergunte, terei prazer em respondê-las.
PS
Outro vídeo que não fará parte de uma série de minhas publicações, mas ainda será baseado no efeito estroboscópico.