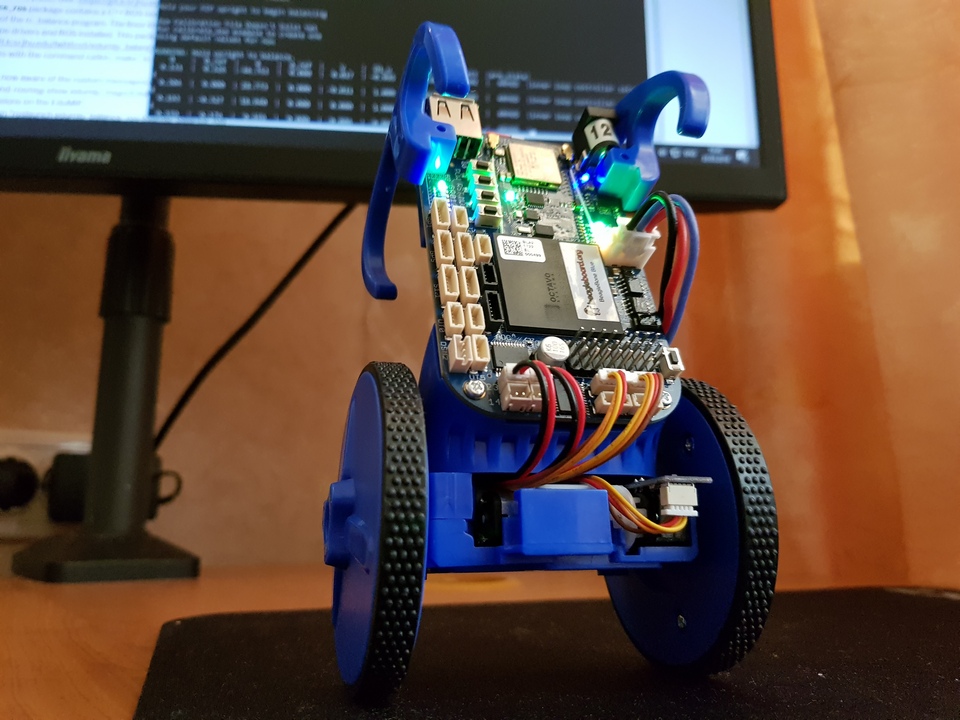
O robô pode se equilibrar sobre duas rodas, dirigir rápido. A bordo do linux completo, há wifi. Você pode programar através da interface da web. Existem instruções e fontes para executar o ROS nele. Em geral, muitas oportunidades para criatividade.
Há muito tempo, queria brincar com um robô com giroscópio, acelerômetro, bússola e sim para aprender ROS. Eu não queria soldar e mexer em nada como antes. Portanto, o BeagleBone possui um PC pago com uma placa de expansão integrada para os robôs BeagleBone Blue, que possui os sensores e drivers de motor necessários. Depois de algum tempo, o kit para montagem do robô EduMip nos estados foi finalizado para ele e eles escreveram instruções para iniciar o ROS nele com as fontes. Em geral, peguei fogo.
O que está incluído no kit:
- distância entre eixos com motores / engrenagens / rodas / codificadores / fios
- LiPo de 2 células 1400 mAh
- Carregador de 12 volts
- Osso Beagle azul
O EduMIP foi criado no laboratório de robótica UC SAN DIEGO COORDINATED ROBOTICS LAB. Utilizado em cursos online, universidades e círculos de robótica.
EduMIP é uma plataforma de aprendizado:
- Modelagem dinâmica e controle de feedback de sistemas instáveis.
- Planejamento de movimentos de robôs e prevenção de colisões.
- Controle de motor CC através de pontes H e codificadores.
- Avaliação de orientação via IMU e Barometer.
- Comunicação via WiFi (802.11 b / g / n) e Bluetooth (4.1 / BLE).
- Carregar, equilibrar, proteger e monitorar a bateria de célula LiPo 2 (incluída).
- Programação C multithread, orientada a eventos, no Debian Linux.
O EduMIP é compatível com Python, ROS, MATLAB & Simulink e LabVIEW.
O chassi do EduMip foi desenvolvido em colaboração com a WowWee.
O EduMIP é fácil de expandir com a impressão 3D, há uma extensa biblioteca de software para milhões de sensores e dispositivos de comunicação padrão via: USB, I2C, SPI, CAN, UART (GPS, DSM2), PWM (servos, ESCs), GPIO, ADC.
Mesmo assim, tive que comprar outro ferro de soldar para soldar os fios dos motores, por esse dinheiro que poderíamos soldar imediatamente. O restante do kit é de alta qualidade e bem embalado.
Coletado em uma noite. Motores e rodas são na minha opinião mole. Fico feliz que não foi necessário praticamente soldar todos os eletrônicos em uma placa. A bateria é carregada através da placa; no script, você pode ver a voltagem da bateria.
Uma vantagem indubitável para mim é que o BedgleBone possui wi-fi embutido e linux completo. O Cloud9 IDE está disponível imediatamente e você pode programar o robô através do ar em python e outras linguagens de programação. A placa possui 4 gigabytes de memória incorporados nos quais o Linux Debian já está gravado, para que você possa iniciar e programar sem uma unidade flash. Somente para ROS, você precisa gravar a imagem em um cartão de memória.
Na próxima parte, analisarei como programá-lo, enquanto estou preso em como instalar bibliotecas adicionais desse robô no Debian.