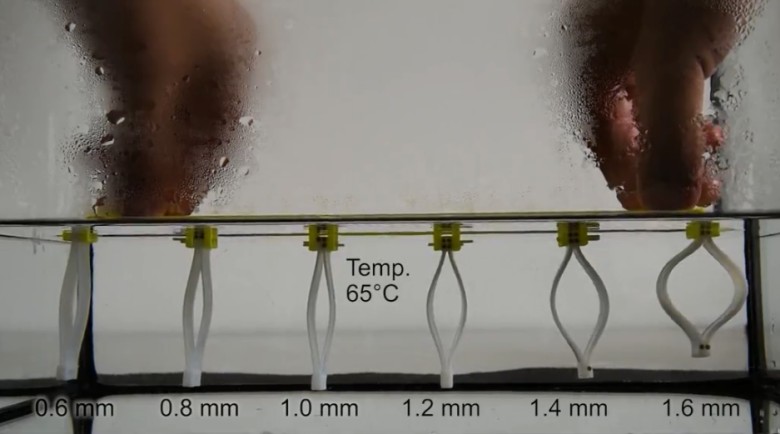
 A reação das tiras de polímeros flexíveis às mudanças de temperatura depende da sua espessura. Aqui são mostradas tiras de 0,6 mm a 1,6 mm quando colocadas em água a 65 ° C. A velocidade de endireitamento varia de 7 a 37 segundos, o que permite programar as ações do robô em uma determinada sequência
A reação das tiras de polímeros flexíveis às mudanças de temperatura depende da sua espessura. Aqui são mostradas tiras de 0,6 mm a 1,6 mm quando colocadas em água a 65 ° C. A velocidade de endireitamento varia de 7 a 37 segundos, o que permite programar as ações do robô em uma determinada sequênciaEngenheiros do Instituto de Tecnologia da Califórnia e colegas da Escola Técnica Superior Suíça de Zurique
criaram robôs que podem se mover de forma independente sem o uso de motores, servos ou fonte de energia. Soa como uma máquina de movimento perpétuo? Na verdade não. O fato é que cada par de remos ou "músculos" é capaz de apenas
um movimento de remos depois que o robô é baixado na água. Mas o destaque é que os músculos e remos podem ser quantos você quiser - e eles podem trabalhar em diferentes intervalos de tempo, um após o outro. Assim, você pode pré-
programar a trajetória do robô e executar várias ações - por exemplo, despejar uma carga seguida por uma manobra de esquiva. A pesquisa foi financiada pelo Escritório de Pesquisa do Exército.
Apesar da aparente simplicidade, esses são os primeiros dispositivos desse tipo que usam deformação do material para ações de temperatura programadas na água. O princípio de operação é mostrado nos
vídeos de demonstração .
Lista de demos em vídeo
- Um golpe . A distância percorrida de um curso corresponde aproximadamente a 1,15 do comprimento do robô.
- A reação dos "músculos" a uma mudança de temperatura depende da espessura das bandas do polímero flexível. O vídeo mostra faixas com uma espessura de 0,6 mm a 1,6 mm quando colocadas em água a 65 ° C. A velocidade do alisamento varia de 7 a 37 segundos.
- Movimento de um robô remador com dois pares de remos . A sequência de golpes é regulada pela espessura dos músculos no primeiro e no segundo pares de remos. A distância percorrida a partir do curso duplo é aproximadamente 1,9 vezes o comprimento do robô.
- Movimento com uma curva à esquerda . O primeiro par de remos move o robô para a frente em cerca de 0,5 do seu corpo, e o remo do segundo estágio gira o corpo em cerca de 21,45 °.
- Movimento com duas voltas . Após o primeiro curso, o robô gira cerca de 21,64 ° para a esquerda e, após o segundo curso, gira cerca de 21,45 ° para a direita.
- Músculos feitos de outro material que se expandem a uma temperatura diferente de 40 ° C. O vídeo mostra que o material anterior não responde a esta temperatura. Assim, os cientistas podem programar o robô para vários movimentos, dependendo da temperatura ambiente.
- Um exemplo de um algoritmo complexo . O robô nada a distância definida, diminui a carga e depois flutua na direção oposta. A primeira condição é fornecida por tiras de polímero mais finas que disparam anteriormente. A carga é protegida por tiras grossas que reagem mais tarde e liberam a carga após o robô percorrer a distância programada.
- O mecanismo interno do atuador mostra como o músculo pressiona e transfere o mecanismo biestável de um estado de equilíbrio para outro.
Segundo os desenvolvedores, este estudo em certo sentido “apaga a fronteira entre materiais e robôs”, uma vez que o próprio material atua como uma máquina no dispositivo: “Nossos exemplos mostram que podemos usar materiais estruturados que são deformados em resposta a sinais ambientais, por controle e movimento de robôs,
diz Chiara Daraio, professora de engenharia mecânica e física aplicada no Departamento de Engenharia e Ciências Aplicadas do Instituto de Tecnologia da Califórnia, uma das autoras de um artigo científico.
O robô é acionado por tiras de polímero flexível, que encolhem quando frio e se estendem quando aquecidas. O polímero é posicionado de modo a ativar um interruptor biestável no corpo do robô, que por sua vez é anexado a um elemento móvel, por exemplo, a uma pá para avançar.
O estudo baseia-se em
trabalhos científicos anteriores sobre as cadeias de elementos biestáveis para transmitir sinais e projetar portas lógicas de uma máquina programável.
Além da temperatura, o robô pode ser programado para executar ações dependendo de outras condições - por exemplo, para responder a alterações na acidez do meio.
O artigo científico foi
publicado em 15 de maio de 2018 na revista
Proceedings da Academia Nacional de Ciências dos Estados Unidos da América (doi: 10.1073 / pnas.1800386115,
pdf ).