Primeiro, escrevi uma longa introdução de onde veio essa tarefa e depois me pareceu entediante e a apaguei.
Então, a tarefa: a criação de um UAV autônomo para monitorar o status das linhas de energia (linhas de energia).
Desde:
- este é um projeto de hobby e posso cometer um grande erro em meus cálculos
- objetos voadores representam um perigo para os seres vivos e suas propriedades,
este artigo deve ser tomado apenas como um horizonte de expansão, e não como um guia de ação.
Lista de defeitos para detecção em linhas de energia.
Requisitos de UAV
- Decolagem e aterrissagem verticais (sem catapultas e paraquedas), ou seja, um helicóptero
- Capaz de decolar, voar em determinados pontos, retornar e pousar automaticamente
- Você pode editar uma missão de vôo, dar um comando para decolar e pousar de qualquer lugar do mundo
- Transmita telemetria e vídeo em tempo real pela Internet
- Upload de fotos e vídeos da câmera de bordo para o servidor durante ou após o voo
- Carregue ou substitua mecanicamente a bateria sem intervenção humana.
E também dois requisitos conflitantes:
- Eletrônicos confiáveis (se ele cair em algum lugar, considere perdido)
- O custo relativamente baixo do experimento (se ele cair em algum lugar, considere perdido)
O grau de autonomia, idealmente, é fantástico: o drone voa por uma rota pré-planejada, carrega uma foto no servidor, o software no servidor identifica defeitos na foto e faz uma solicitação à equipe de reparo com as coordenadas dos locais de trabalho. O drone em si não deve exigir a atenção de uma pessoa antes do final da vida útil de qualquer peça, por exemplo, uma bateria ou rolamentos.
É claro que essa tarefa não dura um ano, mas eu começarei e talvez alguém continue e continue.
Por exemplo, versões industriais finalizadas de complexos autônomos:
um ,
dois ,
três ,
quatro ,
cinco ,
seis ,
sete ,
oito ,
nove ,
dez ,
onze ,
doze ,
treze ,
quatorze . Escrevi pedidos para todos, como um potencial comprador, para descobrir os preços. Deles prontos para venda: 2; pronto para venda na Rússia: 0.
Escolhendo um controlador de vôo
Como preciso transmitir vídeo e telemetria pela Internet, imediatamente me ocorre colocar um microcomputador com modem 4G e uma câmera no drone e fazer um webcast a partir deste kit. Tais soluções foram encontradas:
uma ,
duas ,
três . Estas são placas únicas comuns com um modem e câmera USB 4G externos. Para codificação e transmissão de vídeo, o
gstreamer é usado. Mas essas coisas em si não sabem como controlar o drone, elas precisam ser usadas em conjunto com o controlador de vôo.
O controlador de vôo é o cérebro do drone. Ele monitora o status dos sensores de posição (giroscópio, acelerômetro, bússola), coordenadas GPS, a posição das alças no painel de controle e, com base nesses dados, controla os motores para travar em um ponto ou voar para algum lugar. O controlador de vôo precisará estar conectado de alguma forma ao computador de bordo para que você possa carregar a tarefa de voo ou indicar um ponto arbitrário para onde voar e quando ligar a câmera.
À venda, você pode encontrar diversos controladores muito diferentes entre si em preço e funcionalidade. Alguns deles trabalham em seu próprio software, e outros usam software de código aberto, como o
Ardupilot e seu garfo
PX4 .
Com o Ardupilot, joguei em
atmegs de 8 bits que não tinham um gerenciador de inicialização USB, mas eles foram costurados no programador. Desde então, eu não o encontrei e fiquei agradavelmente surpreendido quando descobri que agora ele pode trabalhar em computadores Linux de 64 bits, ele tem uma enorme comunidade de usuários, hobbies e profissionais, uma longa lista de sensores suportados e prontos para o uso.
planos para 2018-2019 . Durante esse tempo, ele conseguiu se transformar em um projeto
DroneCode e depois se
desconectar dele.
À primeira vista, implementou todas as funções necessárias: decolagem e pouso automáticos, carregamento de tarefas de voo, aplicativos de desktop e móveis para todas as principais famílias de sistemas operacionais. Os programas de controle (GCS - Ground Control Station) se comunicam com o controlador de bordo via mensagens curtas através do
protocolo MAVLink aberto através de um conjunto de modems de rádio (o drone envia telemetria, o GCS envia comandos de controle). Suspeito que essas mensagens possam ser lançadas pela Internet.
Dê uma olhada na
lista de controladores suportados e escolha algo. Há uma dúzia de opções lá, de pequenas a grandes e com características diferentes.
Entre toda a variedade de controladores, gostei de várias opções:
| Controlador de voo | Erle PXFMini | Borda Emlid | Navio 2 | Erle Brain 3 | PixHawk 2 Cube |
| Computador adicional | Raspberry Pi Zero W | não | Raspberry pi 3 | não | Raspberry pi 3 |
| | | | | |
| Definir peso, g | 84 | 97 | 98 | 145 | 150 |
| CPUs, total | 1 | 2 | 2 | 1 | 3 |
| SO executando simultaneamente | 1 | 1 | 1 | 1 | 2 |
| Sensores IMU, kits | 1 | 2 | 2 | 1 | 3 |
| Sensor de pressão de ar | 1 | 2 | 1 | 1 | 1 |
| Redundância de energia | não | 2x | 3x | não | 2x |
| GPS, Glonass | módulo externo
com magnetômetro adicional | módulo externo
com magnetômetro adicional | receptor embutido, antena externa | módulo externo
com magnetômetro adicional | módulo externo |
| Entrada de vídeo | CSI em Framboesa | HDMI | CSI em Framboesa | CSI | CSI em Framboesa |
| Wifi | está ai | está ai
Longo alcance 2km
+52 g | está ai | está ai | está ai |
| | | | | |
| O custo do kit, US $ | 212 | 700 | 215 | 341 | 331 |
O kit mais leve (84 g) é obtido no microcomputador
Raspberry Pi Zero W (9 g), no controlador
Erle PXFMini (15 g), no módulo GNSS externo nativo (46 g) e em um
hub USB adicional (14 g).

Há apenas um processador em funcionamento neste kit - no Raspberry Pi. Nela está o controle PWM dos reguladores do motor, lendo as leituras dos sensores, o sistema operacional Linux com toda a coragem e decodificando o vídeo da câmera. Como o Pi Zero não possui portas USB, nesta opção você deve usar um hub externo. Sensores IMU e entrada de energia sem redundância.
O próximo conjunto (97 g) de uma empresa de Hong Kong com nomes russos na equipe de desenvolvimento é o controlador
Emlid Edge (59 g) com um módulo GNSS (38 g). O módulo GNSS opera de acordo com o protocolo
UAVCAN e também é equipado com um magnetômetro e um sensor de pressão de ar. Aqui, um processador ARM Cortex-M3 separado é responsável pelo PWM, o Linux OS está girando no quad-core principal do ARM Cortex-A53.

O controlador possui uma entrada de vídeo HDMI, que permite conectar diretamente a ela qualquer câmera com essa saída, por exemplo, GoPro 4 ou 5. O custo relativamente alto é explicado pelos transceptores wifi de longo alcance no kit (até 2 km com transmissão de vídeo em HD). O peso do módulo de bordo (52 g) não está incluído na tabela geral, pois eu preciso de comunicação 4G, no entanto, você pode ter esta opção em mente: a partir de um wifi de longo alcance, você pode criar um canal de comunicação de backup através de um roteador estacionário com Internet com fio.
A próxima opção (98 g) consiste no famoso microcomputador
Raspberry Pi 3 (45 g) com um controlador de blindagem
Navio 2 (23 g) do mesmo Emlid e uma antena GNSS externa (30 g). O controlador possui um processador Cortex-M3 separado para controlar o PWM em 14 canais e descriptografar os sinais SBUS e PPM de entrada do receptor. Por sua vez, é controlado através do driver no kernel do Linux, que roda no Raspberry.

O controlador está equipado com um par de sensores IMU separados (acelerômetro, giroscópio, magnetômetro) MPU9250 e LSM9DS1, um sensor de pressão de ar e módulo GNSS
U-blox NEO-M8N , que vê GPS, Glonass e BeiDou com uma antena externa através do conector MCX.
Você pode alimentar essa “torta” de 5 volts ao mesmo tempo em três lados, que funcionam como fontes independentes que se duplicam: o conector de alimentação principal na blindagem, saídas PWM servo, micro-USB no Raspberry.
O controlador
Erle Brain 3 (100 g) com um módulo GPS externo (45 g) por seu peso, preço e um conjunto de sensores é exibido na tabela para que eu nem insira uma foto aqui.
Em seguida, temos o mais confiável e mais conjunto difícil de (150 g), que consiste no controlador de vôo populares
PixHawk Cube 2 (80 g) com uma arquitetura aberta e computador Raspberry Pi 3. Framboesa Em vez disso, neste caso, você pode usar qualquer odnoplatnik luz, por exemplo,
ODROID XU4 ,
NVIDIA Jetson ou qualquer outro com as interfaces corretas e o peso certo.

O próprio PixHawk possui 2 processadores instalados: o primeiro STM32F427 Cortex M4 de 32 bits - o principal que executa o
NuttX OS em tempo real (RTOS) e o segundo STM32F103 de 32 bits à prova de falhas. O controlador é feito na forma de módulos: processadores e sensores IMU são instalados no cubo (em uma montagem antivibração e mesmo com aquecimento), e a energia e os conectores de toda a periferia são trazidos para a base. Supõe-se que o básico possa ser diferente e todos possam desenvolver seus próprios para atender a requisitos específicos, nos quais você poderá colocar o cubo final. A propósito, existe uma versão pronta com um conector para instalar o microcomputador
Intel Edison . Mas, como a Intel não lança mais esses computadores, o Raspberry também estará neste kit como um computador de bordo.
O Raspberry é usado como um computador adicional para conectar-se à Internet e você pode executar qualquer tarefa com muitos recursos (por exemplo, reconhecimento de padrões no OpenCV), sem medo de que falhas neste processo “pesem” funções críticas, como controle do motor.
Portanto, considerando o peso, as especificações e o preço, o primeiro lugar para mim é o kit Navio 2 + Raspberry e o segundo Pixhawk 2 Cube + Raspberry (+52 g). Agora, se no Pixhawk houvesse uma base no conector para o pequeno Raspberry Zero e até uma saída USB, seria mais interessante. Mas você ainda não pode comprar um, mas ainda não é interessante fazê-lo.
Escreverei em notas que o aumento da confiabilidade custa 52 gramas adicionais e US $ 110. De acordo com o resultado total dos cálculos, esses números podem ser insignificantes.
Carregamento autônomo
Como você pode ver nas versões concluídas acima, existem várias abordagens para a preparação de um drone autônomo para o próximo voo: carregar a bateria por meio de blocos de contato, carregamento por indução sem contato e substituição mecanizada da bateria com o carregamento subsequente na estação.
Cada método tem seus prós e contras, escreverei sobre eles separadamente, mas, de qualquer forma, para o seu funcionamento, o drone deve ser capaz de pousar no ponto desejado com precisão quase centimétrica.
Desembarque "direto ao ponto"
Para um pouso exato, você pode usar a câmera do computador de bordo padrão, os marcadores visuais e o OpenCV para reconhecê-los. Aqui está
uma solução que você pode pesquisar no Google.
Outro novo apareceu quando escrevi este artigo. Mas o reconhecimento de padrões é um processo demorado para o Raspberry, e você não deseja fazer o download sem necessidade especial. Além disso, a qualidade do reconhecimento dependerá muito do material do qual o marcador é feito e das condições de iluminação. É desejável que este seja um sensor separado e forneça coordenadas prontas para o ponto visual desejado, independentemente da presença e ângulo de incidência da luz. E isso está na lista de equipamentos Ardupilot suportados, chamados
IR-Lock .
 Airobotics
Airobotics da lista acima também usa esta solução. É baseado no
módulo de câmera de código aberto
Pixy CMUcam5 . Este módulo está equipado com uma câmera e um processador e pode ser "ensinado" a reconhecer certas imagens de objetos e, na saída, obter coordenadas prontas desses objetos na imagem.
Conhecendo as coordenadas da imagem reconhecida na imagem e a distância, o controlador de vôo calcula até que ponto e em qual direção o drone precisa ser movido.
A modificação do IR-Lock consiste no fato de que uma
lanterna infravermelha dos LEDs é usada como um marcador a ser reconhecido, e na câmera as lentes convencionais são substituídas por aquelas que transmitem apenas luz infravermelha. Como resultado, em qualquer luz, a câmera vê a luminescência da lâmpada em branco sobre um fundo preto (e nada mais), o que aumenta muito a precisão do reconhecimento.
Para a operação normal desse sensor, também
é necessário um
telêmetro , que medirá a altura acima do solo. Os desenvolvedores recomendam o uso de um telêmetro a laser, por exemplo,
LightWare LW20 (20 gramas e US $ 299, mede até 100 m) ou um
VL53L0X barato e curto (menos de 1 grama e US $ 10, mede até 2 m), que foi
suportado nas versões mais recentes do Ardupilot. Por alguma razão, o sensor ultrassônico para fins de pouso não merece a confiança dos desenvolvedores do IR-Lock.
A propósito, os drones DJI pousam automaticamente usando câmeras de ultrassom e estéreo.
Pendure como um homem morto
Para que o drone fique no mesmo lugar e não “nade”, o GPS sozinho não é suficiente. Infelizmente, devido à atmosfera, as coordenadas dos receptores de GPS podem flutuar a dezenas de metros, e
os sistemas de correção
GPS RTK devem ser usados para obter uma precisão de centímetro. Este sistema usa uma estação estacionária terrestre como padrão para desvios de coordenadas e comunicação via rádio com a placa para enviar os valores desses desvios para lá. Isso é necessário para fotografar planos fotográficos, seguido de colá-los em cartões grandes e, com o objetivo de ficar no lugar, vou me limitar ao sensor óptico
PX4Flow por
enquanto .
Funciona com o mesmo princípio de um mouse óptico. Ao contrário do IR-Lock, ele não reconhece uma imagem específica e no Ardupilot eles funcionam em diferentes modos de vôo. A imagem da câmera é analisada em um deslocamento de 400 vezes por segundo, e os valores calculados de deslocamento podem ser lidos pelo controlador usando o protocolo I2C. O sensor (
hardware aberto ) pesa 15 gramas e tem tudo o que você precisa em sua placa: uma CPU Cortex M4F de 168 MHz (128 + 64 KB de RAM), um sensor óptico 752 × 480 MT9V034 e um giroscópio de 3 eixos L3GD20. Para sua operação normal, também é recomendável usar um telêmetro a laser, em vez de um ultrassônico. Embora o próprio módulo forneça um conector apenas para o sensor ultrassônico.
Kit Eletrônico Mínimo
Aqui está o que reuniu:
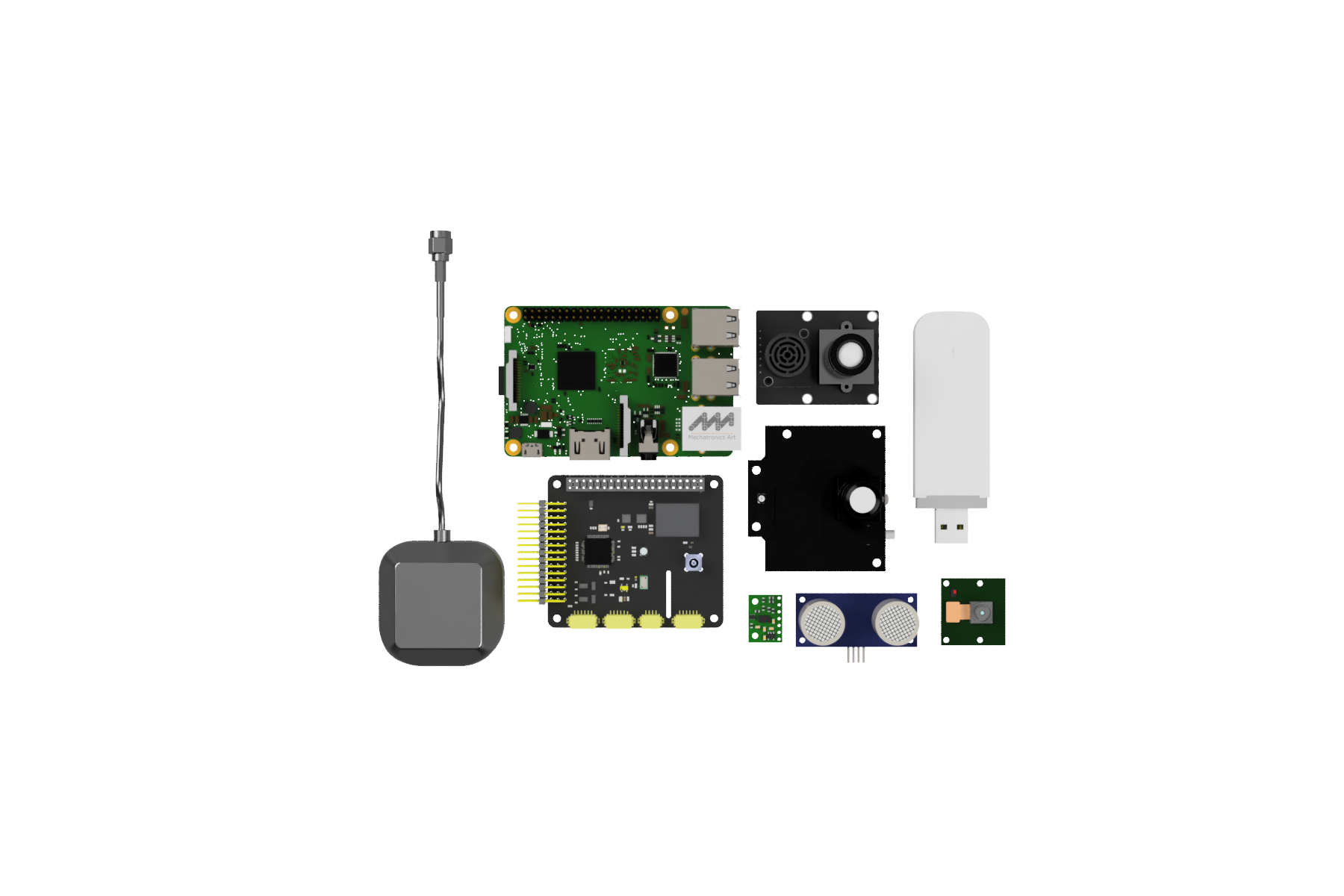
O peso total é de 199 G. Todos os componentes trabalham de 5 volts e consomem quase 2 ampères (10 watts) no modo de transmissão de vídeo.
O kit contém um sensor de distância ultra-sônico que abordará o assunto de obstáculos. Deixei a visão estéreo e os lidares circulares para mais tarde, se uma necessidade real surgir neles.
Carga útil
Como a câmera nativa da Raspberry tira fotos com qualidade média e também não sabe como capturar fotos ao mesmo tempo que o vídeo, ela será usada apenas para webcasting e, como câmera principal, você precisa de uma câmera adequada para detectar defeitos nas linhas de energia.
A GoPro Hero 5 Session , o
Parrot Sequoia multiespectral, o
Sentera Double 4K duplo e o
FLIR Vue Pro infravermelho
são adequados para a maioria dos itens da lista de defeitos detectados. Cada um deles pesa cerca de 100 g.
Para estabilizar a câmera, a fim de melhorar a qualidade das imagens, uma suspensão axial de 2 ou 3 entra na carga com ela.
 As
As suspensões
simples de 3 eixos pesam cerca de 160 ge são alimentadas por 12 volts, possuem uma corrente de trabalho nessa voltagem de cerca de 50 mA e uma corrente máxima de 700 mA quando os motores atolam.
Nutrição
Para alimentar todos os componentes eletrônicos, são necessárias fontes de 5 Volts (mínimo 2,2 Amperes) e 12 Volts (mínimo 1 Amperes). Dada a energia de backup do controlador de vôo, você precisa de duas fontes independentes de 5 volts. Você pode criar um sistema de energia a partir de módulos individuais de valor nominal adequado ou encontrar um "3 em 1" pré-fabricado, por exemplo,
como (24 g, tensão de entrada máxima de até 28 Volts, saídas 3A). Um
sensor de corrente (22 g) será conectado a ele para que seja possível medir o consumo de mAh na bateria.
Kit de eletrônicos + câmera + suspensão + sistema de energia pesam 505 g.
Motores e hélices
Em muitos drones profissionais, eu vi motores e hélices da
T-Motor . Aparentemente não é casual. Na documentação do Ardupilot, eles também são
recomendados como um sistema de propulsão para drones profissionais. Portanto, procuraremos motores adequados para eles.
Para que o drone voe por um longo tempo, são necessários motores com a máxima eficiência. A eficiência dos conjuntos de motores e hélices é medida pela quantidade de empuxo em gramas por 1 Watt de energia consumida.
Para descobrir qual motor é o mais adequado, você precisa conhecer o peso total do drone totalmente montado, levando em consideração a estrutura, a bateria e os próprios motores com parafusos. A bateria é necessária para durar 30 minutos. A estrutura é necessária para que tudo caiba nela e os parafusos não toquem em nada.
Muitas incógnitas, então usarei a
calculadora on-line
para os quadcopters E-calc .
Tendo jogado na calculadora, escolhi os
motores Antigravity 4004 KV300 (53 g) com parafusos
15x5 (27 g). No modo ideal, com uma tensão de alimentação de 24 Volts, esse kit puxa 474 gramas a uma corrente de 1,4 A. A eficiência é de 14,11 g / W, a razão de tração / peso morto = 5,9: 1. Em velocidade máxima, o impulso é de 1311 gramas a uma corrente de 7,5 A. O helicóptero estará com quatro motores, ou seja, um quadriciclo. Peso ideal de decolagem = (474 g * 4 motores) = 1896 g, máximo (levando em consideração a relação peso / empuxo de 2: 1) = (1311 g * 4 motores) / 2 = 2622 g.
Os motores são controlados por controladores de velocidade. A tensão de alimentação dos motores = 24 Volts, a corrente máxima de operação = 7,5 A, então você precisa de um regulador para essa tensão e com uma corrente de trabalho, levando em consideração a margem de pelo menos 10A. O T-Motor possui o regulador mais leve (7 g sem fios) para essa tensão - é
FPV 35A-32bit 3-6S . É feito com base no popular firmware
BLHeli-32 , com código fechado, mas com configurações amplas e um
grande número de análogos .
Subtotal:O VMG (grupo hélice-motor), composto por motores, hélices e reguladores (4 peças cada), pesa 346 g.
Juntamente com a eletrônica e uma carga útil (346 + 505), obtém-se 851 g, considerando os elementos de fixação, fios e conectores (vamos estimar +100 g) = 951 g.
Com o peso ideal, a estrutura e a bateria permanecem (1896 - 951) = 945 g. Com um máximo (2622 - 951) = 1671 g.
Moldura
Calculamos o tamanho mínimo do quadro para que as hélices de 15 polegadas selecionadas não interfiram entre si para criar tração. As dimensões dos fabricantes de chassis indicam a distância entre os eixos dos motores localizados na diagonal um do outro.
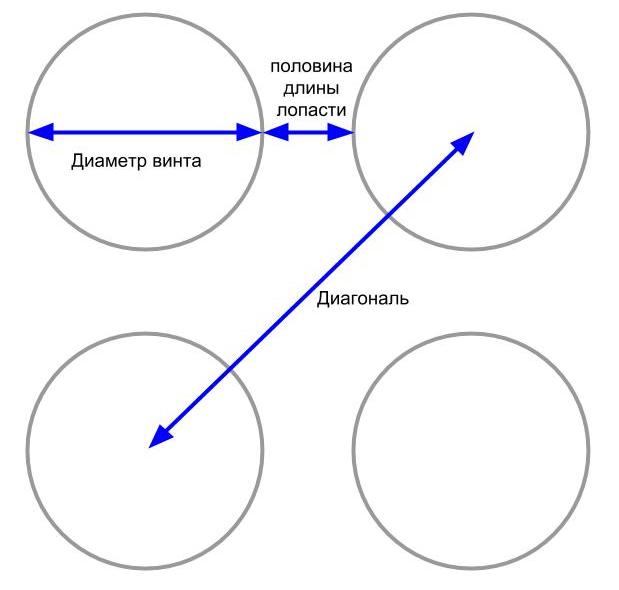
Na figura, é possível encontrar a hipotenusa, calculada a partir da perna, igual à soma do diâmetro do parafuso e da distância entre as hélices. As pás da hélice adjacentes de 15 polegadas girarão 1 milímetro de distância em uma estrutura diagonal de 540 mm. Adicione um pouco de espaço e o tamanho de uma moldura adequada será de aproximadamente 600-700 mm.
Você pode encontrar muitos à venda, por exemplo, uma vez : 600mm e 750g, dois : 650mm e 450g, três : 690 e 675g, quatro : 650mm e 750g. Todos eles se destacam pelo desempenho e pela presença de elementos dobráveis (chassi, vigas) para facilitar o transporte.Adiarei a seleção de uma instância específica para minhas necessidades, para mais cálculos, lembrarei do peso do chassi de 450 G.Permanece uma bateria pesando 495 g para o peso ideal e 1221 g para o máximo.Bateria
Para selecionar uma bateria, você precisa saber o que ela deve fornecer atual.Em velocidade máxima, os motores “comerão” 30A (7,5A * 4 motores) e os componentes eletrônicos em torno de 0,45A (10 watts). Dada a pequena margem, arredondamos a corrente mínima da bateria operacional de 35A. Para baterias Li-Po com alta saída de corrente a 30 ° C, a capacidade mínima será de 1,2 Ah (35/30), e para Li-Po e Li-Ion mais leves com saída de corrente a 10 ° C, a capacidade mínima é de 3,5 Ah (35/10) .Como opção, a montagem do 6S2P do Li-Ion Sony VTC6com um BMS, pesa aproximadamente 630 g (com capacidade de 6 Ah). Com esta bateria, o drone pesará 2031 g, que é 135 g a mais do que o ideal, mas dentro do máximo. Agora vamos calcular quanto tempo o helicóptero pode congelar sob condições ideais. Com um peso total de 2031 g, cada motor possui 508 G. Vamos dar uma olhada nas características do motor e encontrar o consumo atual com esta tração. Será aproximadamente igual a 1.6A. 4 motores e componentes eletrônicos fornecerão um total de 6,85A (1,6 * 4 + 0,45). Levando em conta a descarga da bateria em até 20%, ela ficará (6 Ah * 80% / (6,85 A)) = 0,7 horas ou 42 minutos.Layout
 Enquanto escolhia uma moldura adequada e pensava em como colocar tudo isso e como corrigi-la, cheguei à conclusão de que seria mais fácil desenhar alguns detalhes e solicitar a impressão 3D em plástico e a moagem em carbono. Um par de peças acabadas de ferro e hardware pode ser encomendado no Aliexpress.
Enquanto escolhia uma moldura adequada e pensava em como colocar tudo isso e como corrigi-la, cheguei à conclusão de que seria mais fácil desenhar alguns detalhes e solicitar a impressão 3D em plástico e a moagem em carbono. Um par de peças acabadas de ferro e hardware pode ser encomendado no Aliexpress.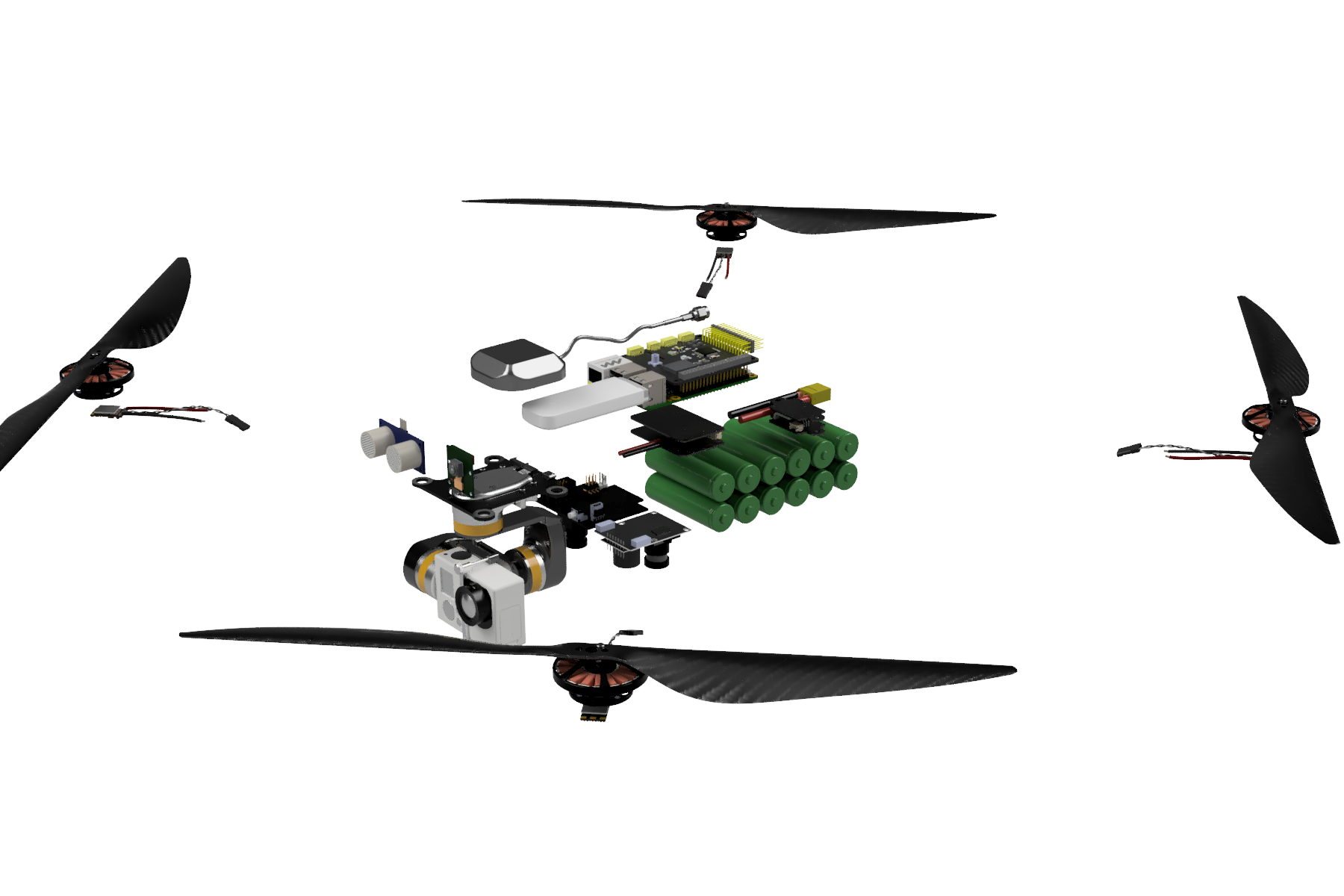 Depois de experimentar um pouco o layout e o centro de gravidade, obtivemos essa estrutura:
Depois de experimentar um pouco o layout e o centro de gravidade, obtivemos essa estrutura: consiste em tubos e chapas de carbono, peças de alumínio e fixadores de titânio. O peso estimado do quadro é de 350 g com uma diagonal de 700 mm. Modelo de quadro 3D e lista de peças .Um modelo totalmente montado (sem fios):
consiste em tubos e chapas de carbono, peças de alumínio e fixadores de titânio. O peso estimado do quadro é de 350 g com uma diagonal de 700 mm. Modelo de quadro 3D e lista de peças .Um modelo totalmente montado (sem fios): O peso total do helicóptero com componentes eletrônicos, uma bateria de íon de lítio 6S2P e os fios deve ser 1931.Sim, também me pareceu que o drone estava vazio demais para uma versão autônoma e que a chuva fina facilmente molharia os eletrônicos a bordo. Portanto, adicionei um pouco de plástico:
O peso total do helicóptero com componentes eletrônicos, uma bateria de íon de lítio 6S2P e os fios deve ser 1931.Sim, também me pareceu que o drone estava vazio demais para uma versão autônoma e que a chuva fina facilmente molharia os eletrônicos a bordo. Portanto, adicionei um pouco de plástico: modelo 3D do quadro . Lista de detalhes do quadro .Montagem do modelo 3D . Lista de componentes .O peso de uma moldura vazia com uma caixa de 384 g, peso total de 2020 g, tempo estimado de suspensão com uma carga (descarga da bateria até 20%): 44 minutos.
modelo 3D do quadro . Lista de detalhes do quadro .Montagem do modelo 3D . Lista de componentes .O peso de uma moldura vazia com uma caixa de 384 g, peso total de 2020 g, tempo estimado de suspensão com uma carga (descarga da bateria até 20%): 44 minutos.Caixa para carregar
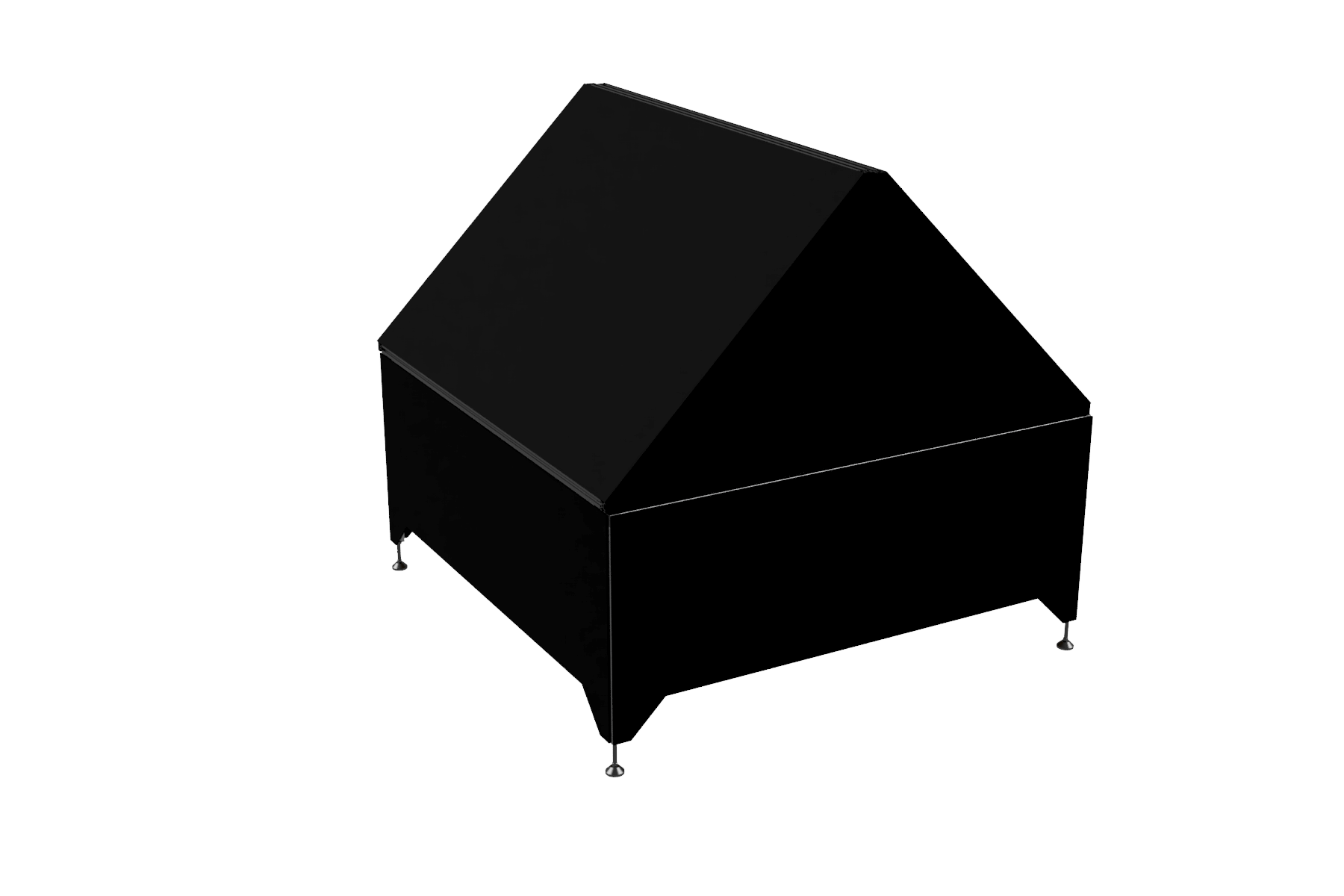
 A caixa de carregamento será feita de um perfil de alumínio, material de montagem e painéis sanduíche de alumínio. Ele terá um roteador, um computador, sensores climáticos e uma câmera com vista para a zona de pouso. Decidi fazer um telhado inclinado de duas asas para que no inverno não acumulasse neve e não interferisse na abertura. O mecanismo para abrir as válvulas ainda não está totalmente pensado e o sistema de carregamento ainda não está definido (preciso de dicas).
A caixa de carregamento será feita de um perfil de alumínio, material de montagem e painéis sanduíche de alumínio. Ele terá um roteador, um computador, sensores climáticos e uma câmera com vista para a zona de pouso. Decidi fazer um telhado inclinado de duas asas para que no inverno não acumulasse neve e não interferisse na abertura. O mecanismo para abrir as válvulas ainda não está totalmente pensado e o sistema de carregamento ainda não está definido (preciso de dicas). No próximo artigo, mostrarei como configurar e lançar um drone via Internet usando a GUI ou a linha de comando, sobre os sistemas de carregamento dos quais estou escolhendo atualmente, software para controlar a aeronave e analisar imagens e por que meu primeiro voo pela Internet não durou tanto tempo:
No próximo artigo, mostrarei como configurar e lançar um drone via Internet usando a GUI ou a linha de comando, sobre os sistemas de carregamento dos quais estou escolhendo atualmente, software para controlar a aeronave e analisar imagens e por que meu primeiro voo pela Internet não durou tanto tempo:
Para continuar ...Parte 2 sobre software.