No último
post, falamos sobre quais projetos de robótica intelectual são de interesse do Sberbank. Hoje vamos analisar as cobots: história, classificação, como elas podem ser obtidas ou usadas para resolver seus problemas.
 Fonte: Universal Robots
Fonte: Universal RobotsParte 1. O que é um cobot
Apenas chamar seu robô de colaborador não é suficiente. Ele deve atender aos requisitos das normas internacionais, a principal delas é a
ISO / TS 15066: 2016 (análogo americano
ANSI / RIA TR R15.606: 2016 ). Embora seja mais correto dizer que isso não é um padrão, mas uma especificação técnica. Há uma diferença: a ISO às vezes desenvolve especificações técnicas antes que os padrões oficiais finais sejam emitidos. Este é um reconhecimento do fato de que o estado atual da robótica colaborativa é dinâmico e evoluirá com o tempo.
O formato das especificações técnicas é necessário para corrigir o estado do “aqui e agora” para que a comunidade possa trabalhar, sabendo que haverá mudanças no futuro.
De acordo com a ISO, um
cobot (abreviação de
robô colaborativo ) é um robô projetado para interação direta com uma pessoa dentro de um determinado espaço conjunto.
Um robô colaborativo
pode ser usado para colaboração (
ISO 10218 ).
Colaboração é um estado no qual um sistema robótico especialmente projetado e um operador trabalham dentro da estrutura de uma área de trabalho conjunta.
Espaço conjunto - um espaço de trabalho protegido no qual um robô e uma pessoa podem executar tarefas simultaneamente durante uma operação de fabricação.
Provavelmente você tem perguntas:
- O robô se tornará colaborativo se eu remover a cerca de proteção de um robô industrial convencional? Não
- O robô se tornará colaborativo se eu limitar a força e a força do manipulador? Não porque um objeto pontiagudo, mesmo com pouca força, pode causar danos a uma pessoa
- Se o robô é colaborativo, isso significa que eu não preciso fazer uma avaliação de risco? A avaliação de risco precisa ser feita.
Simplificando, este é um robô que pode executar tarefas em um espaço comum com uma pessoa, sem causar danos a ela, ou seja,
encontrar uma pessoa na área de trabalho de um cobot é absolutamente seguro . Diferenças do cobot em relação ao robô industrial usual:
- muitos deles são mais baratos que o robô industrial usual: US $ 24 mil em vez de US $ 40 + mil;
- mais fácil de instalar e configurar (os robôs pesam cerca de 30 kg, você só precisa de um soquete de 220v, existe uma GUI);
- é flexível, é fácil alterá-lo (interfaces de programação intuitivas, não é seguro para humanos e para o meio ambiente.
Anteriormente, os meios de proteger as pessoas consistiam em separá-las do equipamento robótico com dispositivos de proteção física, por exemplo, células.

 Pixabay.comControleng.com
Pixabay.comControleng.comCom o advento dos sistemas robóticos colaborativos, esse paradigma mudou: agora você pode trabalhar juntos.

 www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freePor que isso é bom?
www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freePor que isso é bom? Porque obtemos uma sinergia de forças do robô (alta velocidade e precisão ao executar operações de rotina) e humanos (pensamento criativo, trabalham em situações fora do padrão). Isso aumenta a produtividade na indústria, o que significa que tem um efeito positivo na economia como um todo.
A ISO / TS 15066: 2016 é a primeira especificação do mundo de requisitos de segurança para robôs colaborativos. O documento foi desenvolvido por um comitê (que incluía especialistas de 24 países e principais empresas de manufatura) da ISO desde 2010. Destina-se a complementar os requisitos e recomendações para a operação conjunta de um robô industrial descrito na ISO 10218-1 e ISO 10218-2 (“Requisitos de segurança para robôs industriais”), a ISO / TS 15066 define os requisitos de segurança para a operação conjunta de sistemas robóticos industriais e um sistema operacional. Quarta-feira. O documento fornece orientação para quem realiza avaliações de risco quando pessoas e robôs trabalham juntos.
De acordo com a ISO / TS 15066, existem 4 formas de colaboração:- Parada controlada (parada monitorada com classificação de segurança) ;
- Orientação manual;
- Monitoramento de velocidade e separação ;
- Limitação de potência e força
Vamos considerar cada um deles com mais detalhes.
Parada monitorada com classificação de segurançaEsse formulário é usado quando o robô age principalmente por si só, mas às vezes uma pessoa precisa entrar no espaço de trabalho. Por exemplo, um robô processa uma peça de trabalho, mas no meio do processo tecnológico, uma pessoa deve executar uma operação com ela que o robô não pode executar. Se uma pessoa entrar em uma zona de segurança predeterminada, o robô irá parar de se mover. Ao mesmo tempo, a energia dos motores não desaparece - eles fazem uma pausa. Este é um ponto muito importante, porque depois que uma pessoa sai da zona de segurança, o robô retoma imediatamente o trabalho. Isso permite que você não perca tempo com uma reinicialização completa do programa de trabalho, como é o caso de uma parada completa do robô. Se as pessoas passassem constantemente pelo robô, ele simplesmente não teria tempo para trabalhar.
- Uma parada é fornecida sem perda de potência do motor (pausa, não parada).
- O operador pode interagir com o robô.
- O trabalho automático pode retomar quando uma pessoa sai da área de trabalho.
- Em um momento, uma pessoa ou um robô pode se mover.
- Pode ser usado com robôs industriais comuns, mas você precisa adicionar barreiras de segurança à luz (telémetros a laser, fotodetectores).
Orientação manualEssa forma de colaboração é usada para operações precisas com objetos pesados (por exemplo, instalação de portas de carros). Esse formulário pode ser usado para trabalhar com robôs industriais comuns, mas com um dispositivo adicional que "detecta" as forças que o trabalhador aplica ao manipulador, esse geralmente é um sensor de torque no flange do robô.
- O operador está em contato direto com o robô.
- O robô está sob controle manual.
- Tanto humanos quanto robôs podem se mover simultaneamente (os movimentos são controlados por humanos).
- Robôs industriais comuns podem ser usados.
- É necessário equipamento adicional (sensor de torque).
Monitoramento de velocidade e separaçãoAqui, o ambiente do robô é controlado por barreiras de segurança leves, que rastreiam a posição das pessoas, como na primeira forma de colaboração. A diferença está no cenário: se, na primeira forma, a principal tarefa do robô é parar, então aqui está o trabalho simultâneo de uma pessoa e um robô. O comportamento do robô dependerá das zonas pré-configuradas em seu programa de controle: quando uma pessoa se aproxima, o robô reduz a velocidade de seus movimentos e, se uma pessoa chega tão perto que uma colisão é inevitável, ocorre uma parada. À medida que uma pessoa se afasta, o robô retoma o trabalho e acelera.

- A velocidade do robô diminui à medida que uma pessoa se aproxima.
- O robô para quando ocorre uma colisão com uma pessoa.
- Uma pessoa e um robô podem se mover simultaneamente.
- Pode ser usado com robôs industriais comuns, mas você precisa adicionar barreiras de segurança à luz (telémetros a laser, fotodetectores).
- Utilizado para operações que exigem presença frequente de pessoal.
Imagem: Roberta Nelson Shea - “Introdução à ISO / TS 15066”Todas as três formas de colaboração descritas acima podem ser usadas com robôs industriais convencionais, sujeitos à disponibilidade de dispositivos adicionais. Tais soluções são chamadas de
sistemas robóticos colaborativos . A diferença entre um
robô colaborativo é que ele pode não usar dispositivos de segurança adicionais (externos) - eles já estão embutidos nele. Outra diferença importante entre sistemas robóticos colaborativos e robôs colaborativos é que, ao trabalhar juntos, o contato com uma pessoa é excluído. Mas um robô colaborativo pode estar em contato com o corpo humano sem causar danos a ele. Isso é alcançado limitando poder e esforço.
Limitação de potência e forçaA maioria das pessoas, representando o cobot, quer dizer um robô que usa essa forma específica de colaboração. Portanto, consideramos isso com mais detalhes.
Nas "juntas" do robô existem sensores de torque que podem determinar o fato de uma colisão com uma pessoa. Se os sensores detectarem um excesso de forças permitidas, o robô parará. Esses robôs também são projetados para dispersar forças em uma superfície ampla, em caso de impacto - é por isso que os detalhes de seu corpo costumam ser feitos com formas arredondadas. A funcionalidade para limitar poder e força, como regra, está incluída no software padrão.
- A força e a potência do robô são controladas para que o contato acidental entre o robô e o operador não cause danos.
- Uma pessoa e um robô podem se mover simultaneamente.
- Possíveis medidas de redução de risco:
- fatores de projeto do robô (por exemplo, formas arredondadas, materiais maleáveis);
- uma escolha adequada de aplicações e o design da célula do robô (por exemplo, garra, peça de trabalho, trajetória etc.).
O contato no PFL pode ser de dois tipos: transitório (transitório) e quase-estático (quase-estático) .
| Contato de transição
| Quase-estático
contato
|
Descrição do produto
| Evento de contato "curto" (<50 ms).
Parte do corpo humano geralmente pode saltar.
| O contato pode ser longo.
Parte do corpo humano pode ser capturada.
|
Critérios de limite (o que precisa ser gerenciado)
| Esforço de impulso, pressão, tensão.
Transferência de energia, potência específica.
| Forças de pico, pressão, tensão
|
Acessibilidade no projeto / controle
| Posição do robô, carga útil.
Velocidade (relativa).
Área de contato, duração.
| Força (torques de ligação, posição).
Área de contato, duração.
|
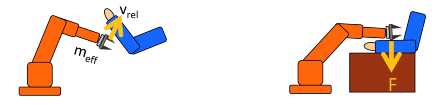 Imagem: Bjoern Matthias - “Robôs colaborativos que limitam o poder e a força”Medidas de redução de risco
Imagem: Bjoern Matthias - “Robôs colaborativos que limitam o poder e a força”Medidas de redução de risco | Contato de transição
| Contato quase estático
|
Construção civil
| Diminuição do peso efetivo.
Maior área de contato.
Maior duração do contato.
| Maior área de contato.
|
Gerência
| Diminuição da velocidade relativa.
Diminua a massa efetiva com a seleção de posição adequada.
| Reduzindo torque e potência máximos.
Tempo de contato reduzido.
|
A configuração final é o equilíbrio entre segurança e desempenho.A especificação técnica ISO / TS 15066 inclui uma tabela desenvolvida pela Universidade de Mainz no estudo do limiar de dor, que fornece uma lista de níveis de força e pressão para projetar os esforços do robô (100 limiares de dor foram estudados em 29 pontos de dor).


 Fonte: ISO / TS 15066: 2016, Fig. 4, Fig A.1
Fonte: ISO / TS 15066: 2016, Fig. 4, Fig A.1 Fonte: ISO / TS 15066: 2016.Fonte: R. Nelson Shea, apresentação do NRSC 2016. Usado com permissãoLembre-se: segurança é a ausência de lesões.
Fonte: ISO / TS 15066: 2016.Fonte: R. Nelson Shea, apresentação do NRSC 2016. Usado com permissãoLembre-se: segurança é a ausência de lesões.Parte 2. A história dos cobots
O primeiro cobot foi desenvolvido em 1996 por
J. Edward Colgate e
Michael Peshkin da Northwestern University (EUA). Em comparação, os robôs industriais convencionais já eram fabricados há mais de 30 anos. No entanto, o termo "cobot" foi cunhado como resultado de uma competição pelo melhor nome por outra pessoa da mesma universidade - Brent Gillespie. O Wall Street Journal gostou tanto do termo que o colocou na lista
Palavras do Amanhã e concedeu um prêmio de US $ 50
A primeira patente do cobot foi registrada nos Estados Unidos em fevereiro de 1996 (
US 5.923.129 ) e a patente usando o termo cobot em outubro de 1997 (
US 5.952.796 ).
Fotos das primeiras cobots podem ser vistas aquiO desenvolvimento de cobots na Northwestern University foi apoiado pelos fundos corporativos General Motors e Ford, bem como pela US National Science Foundation. No mesmo ano de 1996, os cientistas fundaram a empresa Cobotics (em 2002 ela foi absorvida pela Stanley Assembly Technologies).
As cobots ganharam sua popularidade atual graças ao surgimento da empresa Universal Robots (Dinamarca) em 2005. A idéia de um robô barato e fácil de configurar e operar (comparado a um industrial) chegou aos fundadores em 2003. Tendo feito vários protótipos, em 2008 a empresa lançou o primeiro protótipo em série do robô UR5 (o mais popular até o momento) e recebeu investimentos do governo dinamarquês. Em 2012, a empresa lançou um segundo robô (UR10) e, em 2015, foi adquirido pela americana Teradyne por US $ 285 milhões.
Foi após o sucesso da Universal Robots que as cobots começaram a ser feitas por corporações que ocuparam o mercado de robôs industriais por muito tempo e com sucesso (FANUC, ABB, KUKA, BOSCH e outros), e surgiram startups semelhantes:
Repensar a Robótica , Doosan Robotics, Techman Robot. Entre os jovens projetos, também existem imigrantes dos países da CEI - a startup bielorrussa Rozum Robotics.
Parte 3. Onde e como são usadas as cobots
Quantas cobots no mundo? Apesar da crescente popularidade dos cobots, eles ainda não foram destacados em uma classe separada no estudo anual da World Robotics, que conduz a principal fonte de dados do setor, a Federação Internacional de Robótica (IFR).
Atualmente, cerca de 2 milhões de peças de robôs industriais são usadas no mundo (previsão IFR para 2017). Quantos deles são colaborativos não é exatamente conhecido. Há uma avaliação da pesquisa do Barclays, segundo a qual em 2017 havia 32 mil cobots em operação, a grande maioria dos quais produzidos pela
Universal Robots .
Há alguns anos, os cobots eram considerados exclusivamente equipamentos de laboratório, que não têm lugar na produção, mas a possibilidade de configuração flexível e custos mínimos de integração nos permitiram superar a barreira psicológica. Agora, os robôs dessa classe são usados na indústria leve, alimentícia e até na indústria automotiva tradicionalmente ocupada por robôs clássicos.
A Barclays Research
estima o mercado em 2017 em US $ 800 milhões.Há evidências de que até um terço das cobots são
vendidas na China . A IFR avaliou o mercado de robôs industriais em 2017 em US $ 13,1 bilhões.
Previsão para anos futuros:
O IFR prevê o tamanho total do mercado de robôs industriais em 2020 em US $ 23,2 bilhões. Se compararmos as estimativas do Barclays e do IFR, obteremos um aumento notável na participação de cobots no total: de 6,1% em 2017 para 13,5% em 2020 - bastante dinamicamente.
O que o cobots pode fazer:- Pick & Place: carregamento da correia transportadora de descarga.
- Carga / descarga de peças em máquinas.
- Teste e classificação de peças: verificação ou classificação de objetos aleatórios no transportador como parte do controle de qualidade ou outras necessidades.
- Embalagem: coleta e colocação de itens em contêineres para transporte ou armazenamento.
- Fácil montagem: montagem de eletrônicos e eletrodomésticos.
- Operações de acabamento: remoção do excesso de plástico ou metal das peças.
Drivers de crescimento da Cobot nos próximos anos:1. Cobots são mais baratos que os robôs industriais comuns (~ US $ 25 mil em vez de ~ US $ 50) -> o limiar de entrada para pequenas e médias empresas (PMEs) é reduzido.
2. Cobots são mais fáceis de configurar: não é necessário poder programar. Após um dia de treinamento, o trabalhador poderá configurar o robô para executar tarefas de média complexidade.
Você pode tentar você mesmo . Ou seja, não há necessidade de contratar engenheiros de serviço ou integradores de sistemas -> o limite de entrada para as PME diminui novamente.
3. Kobotov é mais fácil de mover: eles são mais fáceis do que os industriais, não precisam de uma infraestrutura local na forma de uma gaiola -> a atratividade para as PME está aumentando, pois a produção pode ser rapidamente redefinida.
4. O
aumento do custo do trabalho manual devido ao envelhecimento da população e uma
diminuição no número de pessoas saudáveis (taxa de trabalhadores por hora: 40 euros na Alemanha, 12 euros nos EUA, 11 euros na Europa Oriental e 9 euros na China. O custo do cobot é de US $ 6 / hora) .
5. A restauração da sinergia dos fatores anteriores leva ao fato de que os EUA e a UE estão devolvendo a produção da China para sua terra natal. Isso pode ajudar a reduzir os custos de envio e melhorar a qualidade do produto.
6. Programas estaduais voltados à automação e robotização da produção. Eles podem estimular e apoiar (inclusive financeiramente) a aquisição e o uso de robôs:
- "Indústria 4.0" na Alemanha;
- "Made in China 2025" na China;
- "Iniciativa Nacional de Robótica 2.0" nos EUA.
Parte 4. Quem produz as cobots
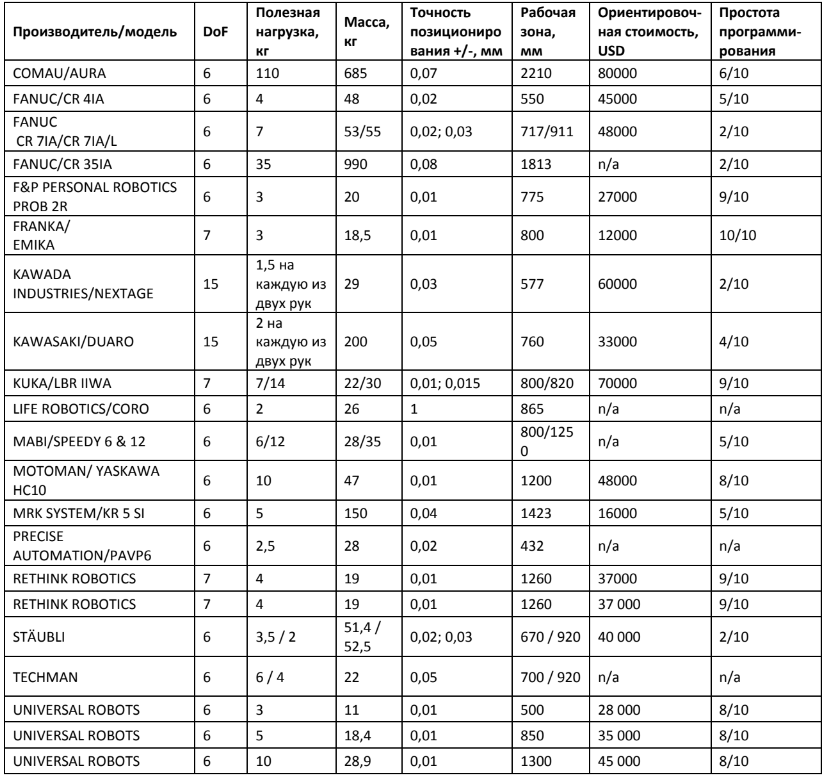 Download da tabela
Download da tabelaParte 5. Como você pode ganhar com cobots e como usá-los para resolver seus problemas
Como ganhar dinheiro com cobots:
Para usar o cobots na solução de seus problemas, é necessário identificar processos (tarefas) potenciais para automação. Ideal para a primeira automação serão tarefas repetitivas com um alto grau de certeza (previsível).
| Apenas
automatizar
| Difícil
automatizar
|
As tarefas
| Movendo objetos, seguindo uma trajetória sem esforço
ou com esforço constante
| Controle de força, por exemplo, polimento ou montagem de precisão
|
Itens
| Uma pequena variedade de itens (tamanhos, massa,
material), formas conhecidas e comuns (cilindro, caixa)
| Uma grande variedade de itens, formas complexas,
objetos deformáveis e frágeis
|
Disposição dos sujeitos
| Itens empilhados uniformemente: em uma caixa, pilha ou palete
| Os itens são despejados em uma caixa / cesta ou seguem em frente
transportador rápido
|
Integração com outros equipamentos
| Usando as interfaces que uma pessoa usa:
botões, canetas
| Conexão e configuração de sensores, integração de software
com máquinas-ferramentas
|
Programação
| Movimentos repetitivos em uma sequência (sem
condições e árvores)
| Lógica complexa e muitas condições, dependendo da
informações de sensores
|
Aqui você pode calcular o ROI do seu projeto de robótica.O artigo utilizou a tradução das seguintes publicações:
- Carole Franklin - “Visão geral ISO / TS 15066: 2016”
- Roberta Nelson Shea - “Introdução à ISO / TS 15066”
- Bjoern Matthias - "Robôs colaborativos Limitação de força e força"
- blog.robotiq.com/what-does-collaborative-robot-mean
- Robotiq - “Cobot eBook”, “Introdução aos robôs colaborativos”, “ISO / TS 15066 Explained”
O texto foi preparado por Albert Efimov e Denis Zatyagov do Laboratório de Robótica Sberbank