É neste vídeo que Marc Raibert, fundador da Boston Dynamics, fala sobre robôs: BigDog, Spot, SpotMini, Atlas. Com base neste vídeo e em outros vídeos em que Marc se apresentou, descreverei brevemente as tecnologias de robôs e os planos futuros da empresa.
Marc Raibert fundou a Boston Dynamics há 25 anos, mas ela ainda não colocou seus robôs em produção. O fundador explica isso com o fato de que a empresa trabalha todo esse tempo para um desenvolvimento mais rápido, além do horizonte das capacidades da robótica atual. No entanto, em seus robôs, a empresa atingiu o nível em que foi possível fabricar um pequeno robô elétrico com quatro pernas, capaz de se movimentar independentemente em terrenos e edifícios irregulares. Portanto, eles começarão a produção em massa do robô SpotMini em meados de 2019, no valor de 1000 peças por ano.
Atualmente, 10 robôs estão sendo testados por clientes em potencial, outros 100 serão entregues dentro de um ano para testes.
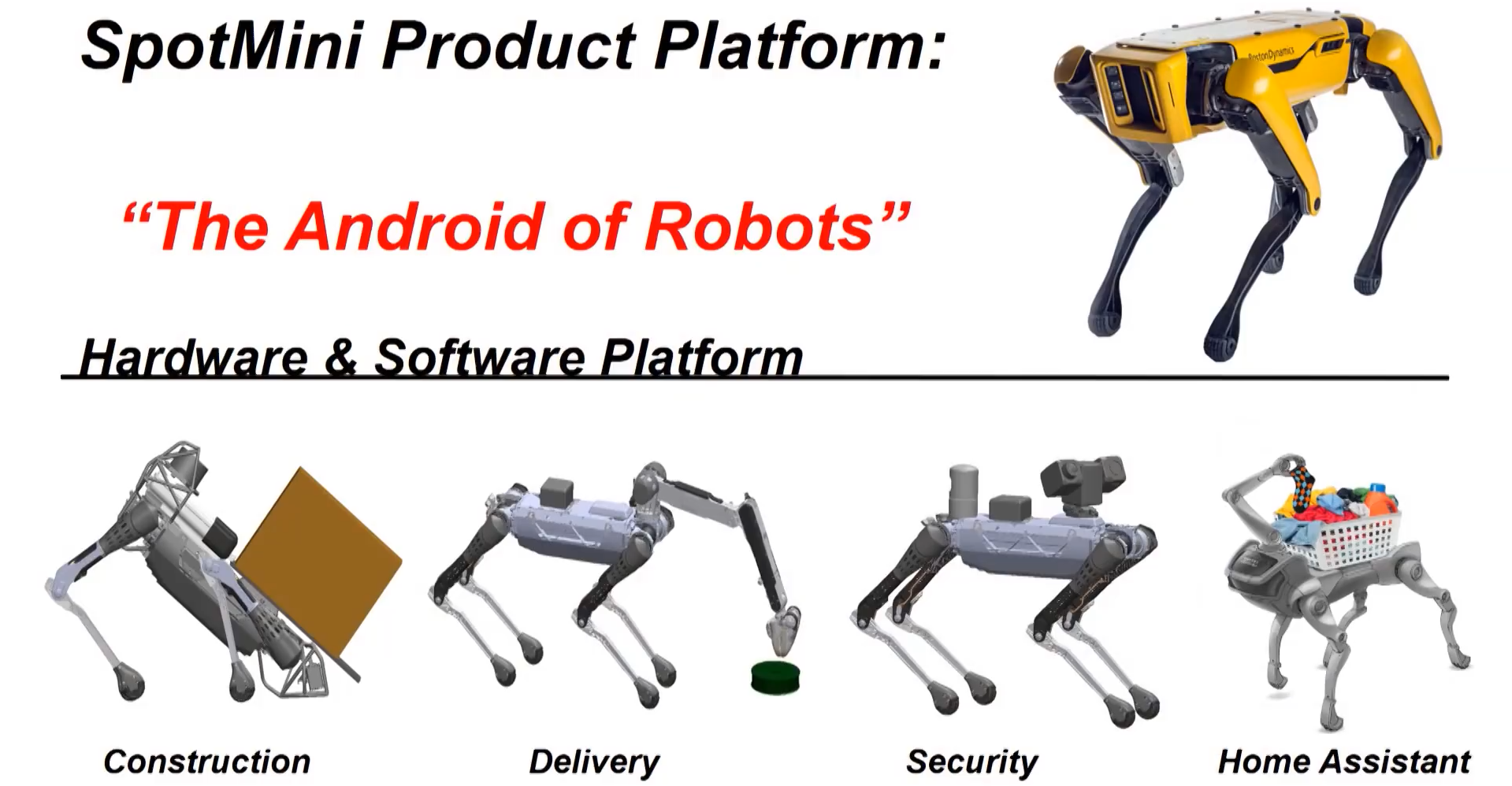
O robô será vendido como uma plataforma na qual você pode instalar sua mão. Possui uma API com a qual desenvolvedores de terceiros poderão gravar seus aplicativos e usar a funcionalidade básica do robô. Existem várias demos de tais aplicativos no vídeo.
Entende-se que o Boston Dinamics estabeleceu a funcionalidade básica do robô, e apenas comandos de alto nível, como chegar lá a essa velocidade, podem ser dados ao operador do robô ou a um desenvolvedor de terceiros, envie uma lata de Coca-Cola.
Marc afirma que o robô pode agir ao lado de uma pessoa e é essencialmente colaborativo, o que justifica no vídeo, de modo que o robô pesa apenas 27 kg e, portanto, não pode causar danos aos seres humanos.

O SpotMini pode detectar uma lata de Coca-Cola, pegá-la e transferi-la para outro local ou entregá-la às pessoas. A foto acima é apenas um exemplo de aplicativo para um robô que executa essa tarefa.
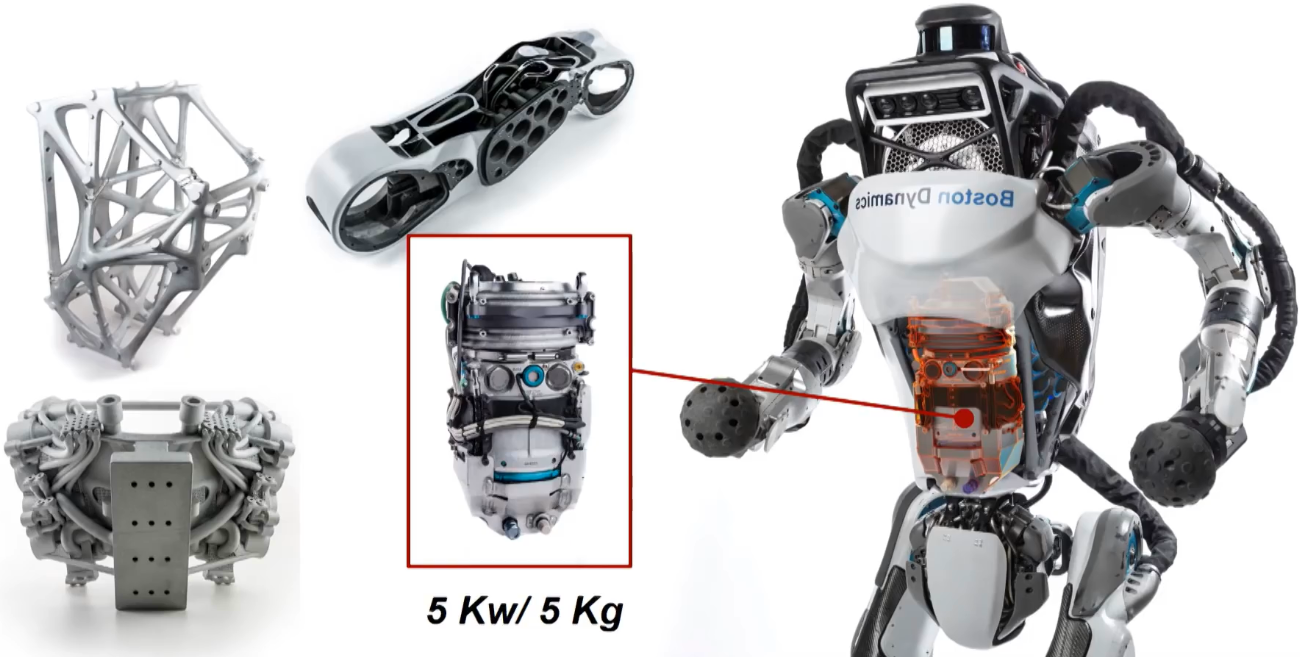
Também interessante é a história sobre as tecnologias usadas no robô Atlas. O peso inicial do robô foi reduzido de 170 kg para 75 com a mesma relação de potência. Ao mesmo tempo, o robô se tornou muito mais ágil e capaz. Isso foi alcançado devido a novos métodos de design e impressão 3D. O vídeo mostra uma perna de robô impressa em uma impressora, que pesa várias vezes menos com a mesma força.
Especialmente digno de nota sobre a usina. No vídeo, Marc diz que eles conseguiram se encaixar nele: um motor, uma bomba, um filtro, um coletor e uma jaqueta de calor com uma bateria no estômago do robô, enquanto o peso de toda a estrutura era de 5 kg com uma potência de 5 quilowatts. Mais uma vez, ele diz que isso não seria possível sem técnicas avançadas de design e impressão 3D.


Em outro vídeo, ele fala sobre o robô Handle, que é planejado como um robô logístico que pode transportar cargas rapidamente por longas distâncias, porque, em vez de pernas, possui rodas.
Uma pequena engenharia reversa minha:
No vídeo, Marc Raibert diz que o robô usa 5 módulos de câmera, dois na frente e um na esquerda, direita e traseira. Aparentemente, eles recusaram o laser lidar na versão comercial. A foto mostra que o módulo da câmera é de alguma forma fora do padrão; no total, você pode ver 5 câmeras no módulo, talvez várias delas sejam uma câmera infravermelha com um receptor. Também é visto que as duas câmeras são pequenas e aparentemente em ângulo entre si. Se alguém souber o que é este módulo, escreva nos comentários. De tudo isso, podemos concluir que o robô só pode fazer com câmeras estéreo, possivelmente com uma câmera de profundidade infravermelha. O algoritmo de posicionamento e localização provavelmente é um SLAM visual, o que não está claro. Em geral, a empresa Boston Dinamics é bastante fechada e não fala muito sobre o software de seus robôs, mas nos fóruns as pessoas que trabalham nela escrevem que têm seu próprio código proprietário, principalmente em C ++ e um pouco em Python. Há menção ao uso de Drake. Talvez no robô Atlas, o ROS tenha sido parcialmente usado em competições.
Na mecânica e no cálculo do movimento dos membros dos robôs, a pesquisa de Marc Raibert está em andamento desde que ele fundou o laboratório de movimentação de pés em 1980 e escreveu o livro Legged Robots that Balance em 1986. Além disso, a partir dos estudos do MIT que descrevi em um artigo anterior sobre o robô cego da chita, podemos concluir que métodos semelhantes também são usados no SpotMini, pois Marc Raibert era professor do MIT.
De fato, será o primeiro robô suficientemente funcional e complexo que será usado diariamente ao lado de uma pessoa. Enquanto ele só pode pegar uma lata de Coca-Cola e bolsas femininas, ainda haverá :)