Olá querido habuchitel!
Nosso
GPS subaquático recentemente completou três anos. Durante esse período, o sistema tornou-se serial, trouxemos vários outros sistemas e dispositivos ao mercado, mas durante todo esse tempo não deixei a obsessão de levar hidroacústica às massas, para torná-lo acessível a amantes comuns, modeladores, representantes de direções como cidadãos
loucos urbanos e cientistas. outro interessado.
E hoje, em homenagem ao nosso humilde aniversário, explicarei em detalhes e nos dedos como determinar a localização geográfica de um objeto subaquático usando apenas dois transceptores: com código fonte, fotos engraçadas, gráficos e resultados experimentais.
Peço a todos os interessados em um caiaque, nas águas limpas e quentes do reservatório de Volgogrado!
 ATENÇÃO: o artigo contém quantidades vestigiais de matan!
ATENÇÃO: o artigo contém quantidades vestigiais de matan!Para aqueles que não entendem o que está acontecendo, mas não se importam em analisá-lo, sugiro que você se familiarize com nossas publicações anteriores sobre o assunto de hidroacústica e navegação subaquática:
Sessão de transmissão de vídeo de som através da água com exposiçãoGPS subaquático do zero por anoGPS subaquático: continuaçãoSobre o efeito das cianobactérias nas funções de fala do presidenteNavegação debaixo d'água: descoberta de direção - não descoberta de direção, você está fadado ao sucessoE também com um ótimo
artigo de revisão
de akuzmin sobre hidroacústica sobre
suporteIntrodutório
Sob a água, as ondas de rádio não se estendem a nenhuma distância significativa e a comunicação e navegação sem fio mais ou menos decentes ali, diretamente no coração, só são possíveis com a ajuda da acústica.
Existem apenas dois tipos e meio de sistemas de navegação em funcionamento:
- base ultracurta (USB, USBL) - com base na determinação do ângulo de chegada do sinal de farol e na medição da distância (pelo método de solicitação-resposta ou por horas sincronizadas). O ângulo de chegada é determinado usando um conjunto de antenas. A posição desejada é determinada pelo ângulo e alcance (tarefa geodésica direta). Sistema UKB, por exemplo, é o nosso ZIMA
- de longo alcance (DB, LBL) - onde os tempos de chegada do sinal são medidos em vários receptores ou em vários transmissores (nosso GPS subaquático funciona exatamente assim) com uma posição conhecida. Você pode medir distâncias usando o método "solicitação-resposta" (método do telêmetro) ou medir diferenças nos tempos de chegada do sinal (método do telêmetro da diferença), por exemplo, GPS e GLONASS. Uma base longa pode ser flutuante (como o nosso RedWAVE ) ou inferior.
- Base curta (KB, SB) - de fato - os mesmos sistemas de base longa, mas todos os elementos de suporte da base estão localizados na mesma base - por exemplo, em um navio.
Como eu disse, uma base longa pode funcionar com base em “solicitação-resposta”; nesse caso, é necessário resolver o problema da interseção de N esferas ou círculos, se a profundidade do objeto desejado for conhecida.
Ou a base pode funcionar como GPS e GLONASS, esses sistemas também são chamados de hiperbólicos, e aqui está o porquê: se o objeto desejado emite periodicamente um sinal de navegação e os relógios de todos os receptores (elementos básicos) são sincronizados, a distância não pode ser medida diretamente, mas você pode descobrir apenas qual dos elementos de base está mais próximo ou mais longe. Ou seja, apenas diferenças de distância estão disponíveis. E como você
sabe do curso da escola:
“Uma hipérbole pode ser definida como a localização geométrica dos pontos, o valor absoluto da diferença nas distâncias entre as quais dois pontos, chamados focos, é constante”
Em outras palavras, se o objeto subaquático emitiu um sinal e o recebemos em dois receptores cujos relógios estão sincronizados, podemos dizer que nosso objeto está em um hiperboloide (ou em um hipérbole se de repente nos transmitiu sua profundidade). Mais receptores - mais hipérboles! Mais hipérboles - maior precisão de localização
sem palácio - sem palácio .
E se não é o objeto subaquático que irradia, mas os elementos de base, então o objeto subaquático, conhecendo sua profundidade, pode determinar sua localização e, além disso, nesse caso, não incomoda ninguém e pode haver tantos objetos quanto eles - são apenas ouvintes. É assim que o GPS / GLONASS e nosso
RedWAVE são organizados .
E prometi navegação através de dois transceptores, um dos quais é aquele cuja posição precisa ser determinada.
Vamos entender
Distância entre dois pontos
A(xa,ya,za) e
B(xb,yb,zb no espaço tridimensional é determinado (você nunca sabe, de repente alguém se esqueceu) por uma fórmula simples:
dAB= sqrt(xa−xb)2+(ya−yb)2+(za−zb)2
Suponha que tenhamos N estações base. Por razões humanitárias, assumimos que suas coordenadas são conhecidas por nós e medimos as distâncias
dbn de cada uma das estações base
Bn(xbn,ybn,zbn) para o objetivo T. Para maior clareza: T é o alvo e B é a base.
Para que possamos em qualquer ponto
M(x,y,z) escreva uma expressão que mostre como esse ponto se encaixa em nossas medições experimentais. De fato, esta será a soma das diferenças entre a distância do ponto M até a estação base correspondente e a distância medida. Quadraremos cada uma dessas diferenças.
epsilon(x,y,z)= sumNn=0 left( sqrt(x−xbn)2+(y−ybn)2+(z−zbn)2−dTbn right)
Em geral, trata-se do método dos mínimos quadrados, e as coordenadas do ponto desejado devem idealmente ser o mínimo da função ε.
Se estivermos falando sobre o método do telêmetro diferencial, que abordaremos neste artigo completamente indiscriminadamente, e para cada estação base, temos uma distância não medida.
dbn e a hora de chegada do sinal
tOA , então, na expressão da função do erro, não haverá distâncias, mas suas diferenças. A única diferença é que você precisa classificar os pares necessários de estações base, por exemplo, para as estações n-ésima n + 1-ésima:
sqrt(x−xbn)2+(y−ybn)2+(z−zbn)2− sqrt(x−xbn+1)2+(y−ybn+1)2+(z−zbn+1)2−v(tOAn−tOAn+1)
v - aqui significa a velocidade do som, que, aliás, não é constante, mas depende fortemente da densidade do meio, lido, da temperatura, salinidade e pressão. E se você quiser fazer tudo da maneira adulta, precisará medi-lo ou calculá-lo diretamente, mas sobre isso em outro momento.
Observe que a profundidade dos objetos posicionados nos modernos sistemas de navegação por sonar é medida diretamente e com uma precisão bastante alta (0,5-2 cm), o que significa que faz sentido converter a tarefa em uma tarefa plana.
Seria possível informar que agora estamos resolvendo isso por qualquer método de otimização e terminamos aqui.
Mas, primeiro, nem tudo é tão simples e, segundo, nem tudo é tão complicado.Vamos começar com as dificuldades
O fato é que depende muito da disposição das estações base entre si (de alguma forma pode ser influenciada, por exemplo, por métodos administrativos =) e da posição do objeto posicionado, em relação aos elementos da base (é muito mais difícil influenciar isso, em uma ampla gama de tarefas inicialmente a posição do objeto posicionado é conhecida muito aproximadamente e é quase impossível estabelecer uma base com antecedência).
Veja a situação como na Figura 1 - como no bom dia:
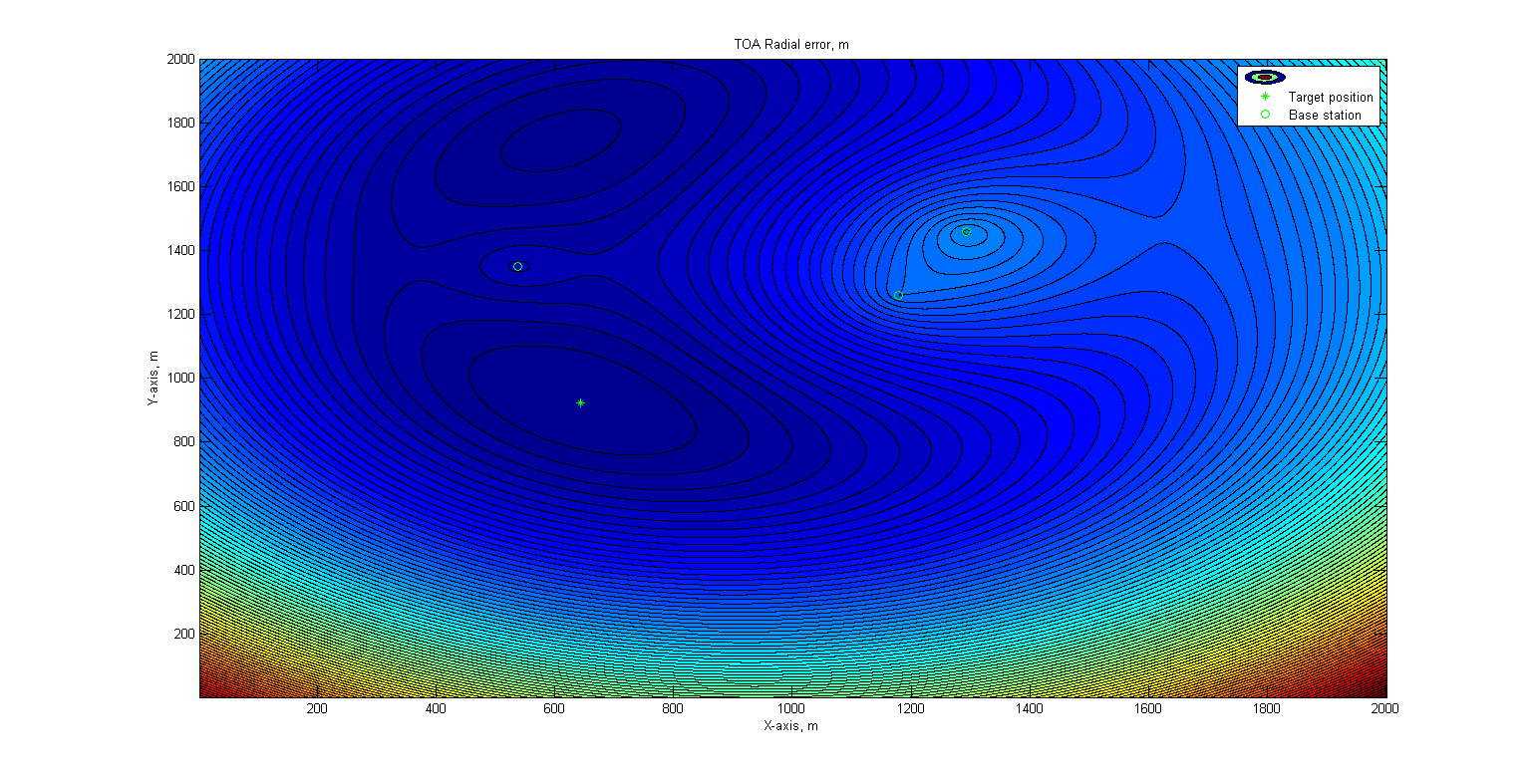 Figura 1 - A superfície dos erros para a base de seus três elementos. Objeto posicionado fora da base. A presença de um mínimo falso
Figura 1 - A superfície dos erros para a base de seus três elementos. Objeto posicionado fora da base. A presença de um mínimo falso
Os círculos verdes indicam as posições das estações base e o asterisco indica a verdadeira posição do objeto posicionado. A cor dos pontos indica o valor da função residual (ε) nesse ponto. Como disse um político, é claro que a superfície tem duas depressões e, ao procurar um mínimo, é muito fácil cair em uma falsa. A situação é ainda pior: levando em conta a escala, a posição real do objeto e a velocidade média de movimento de tais objetos, podemos dizer que permanecerá nessa posição por um longo tempo, a forma da superfície dos erros será preservada e é muito provável que, por muito tempo, receba dados incorretos sobre a localização do objeto .
A animação abaixo ilustra uma situação semelhante - ao iniciar uma pesquisa a partir de um ponto médio entre as estações base e ao iniciar em uma estação próxima, a pesquisa leva a um mínimo falso:
 Figura 2 - A pesquisa atingiu o mínimo falso no início, a partir do ponto médio da base. Base de três elementos
Figura 2 - A pesquisa atingiu o mínimo falso no início, a partir do ponto médio da base. Base de três elementosA pesquisa aqui é implementada usando
o algoritmo Nelder-Mead ou, como também é chamado, o método simplex. É usado, por exemplo, no Matlab na função
fminsearchNão requer o cálculo de derivadas, é muito visual, intuitivo e fácil de implementar.
 Figura 3 - A pesquisa atingiu o mínimo falso ao iniciar a partir do elemento base mais próximo. Base de três elementos
Figura 3 - A pesquisa atingiu o mínimo falso ao iniciar a partir do elemento base mais próximo. Base de três elementos
Pessoas conhecedoras podem ficar indignadas com o fato de ninguém colocar as estações de base em risco, mas, primeiro, às vezes o fazem e, segundo, isso é um exagero para uma demonstração mais visual.
A derrota foi completa. Não foi possível inventar nada ”(C) A. e B. Strugatsky,“ Cidade Condenada ”
O que você pode fazer aqui?
A lógica sugere que você possa usar um dos dois métodos de otimização global -
Recozimento Simulado ou algo semelhante. No entanto, outra abordagem (e mais produtiva) é usar mais informações a priori para selecionar um ponto de partida da pesquisa.
Afinal, sabemos com certeza que o ponto desejado está (com uma fração da suposição) nos círculos nos centros nos quais existem estações base, e os raios desses círculos correspondem aos intervalos medidos!
E também temos certeza de que o erro na medição da faixa em hidroacústica cresce com essa faixa: o som se propaga de maneira não linear.
Você pode tentar escolher o ponto de partida para encontrar o mínimo ao redor (literalmente, no círculo) do farol mais próximo, esperando que a distância a ele seja medida com máxima precisão e guiada pelo mesmo valor da função residual ε.
As coordenadas dos pontos candidatos são formadas neste caso, de acordo com as seguintes fórmulas simples:
x=xbc+dbccos alphay=ybc+dbcsin alpha
xbc e
ybc - coordenadas da estação base mais próxima (c - mais próxima),
dbc - a distância dele até o objeto posicionado.
alpha - argumento (ângulo). Se você agora procura um mínimo para
epsilonε variando
a l p h a no intervalo de 0 a 360 graus com uma etapa, por exemplo, de 10 graus e, em seguida, pesquise próximo a esse valor diminuindo a etapa para 1 grau e estreitando a área de pesquisa para 20 (± 10) graus, é possível determinar muito bem a aproximação inicial, que é praticamente em todos os casos, atinge o alvo quase imediatamente!
Nas figuras abaixo, o método de solução “frontal” para 30 iterações caiu validamente em um mínimo falso, o que levou a uma solução absolutamente errada, e o método com minimização unidimensional preliminar atingiu quase imediatamente o ponto e em 6 iterações se aproximou da posição real com uma divergência de ~ 25 centímetros em a distância até a estação base mais próxima é de ~ 400 metros.
 Figura 4 - Pesquisa atingiu o mínimo falso
Figura 4 - Pesquisa atingiu o mínimo falso Figura 5 - Encontrar a solução certa ao iniciar a partir do ponto obtido pela minimização unidimensional preliminar
Figura 5 - Encontrar a solução certa ao iniciar a partir do ponto obtido pela minimização unidimensional preliminar Figura 6 - A área ampliada ao redor da solução resultante. O círculo amarelo é a solução recebida, a estrela verde é a verdadeira posição do objeto
Figura 6 - A área ampliada ao redor da solução resultante. O círculo amarelo é a solução recebida, a estrela verde é a verdadeira posição do objetoNo exemplo acima, a primeira iteração após uma seleção preliminar da posição de pesquisa inicial deu uma solução a 20 metros da posição real (no campo ~ 600x600 metros).
Nesta fase, descobrimos o método do telêmetro, a situação do telêmetro da diferença é um pouco mais complicada: não há diretrizes claras para escolher o ponto de partida (o círculo é uma boa figura porque está fechado e a hipérbole é ruim porque chega ao infinito).
De volta ao prometido "GPS subaquático" de dois transceptores. Em certo sentido, eu certamente sou esperto: como um GPS subaquático completo, não é possível em
nosso primeiro artigo , mas se você
não tem dinheiro para comprar o dispositivo certo, suporta algumas limitações e se ocupa de uma certa variedade de tarefas, ainda pode fazer algo.
Um objeto posicionado com frequência está imóvel (ou pelo menos se move de forma insignificante). Nesses casos, em vez de várias estações base, você pode realmente usar uma, mas em movimento: essa abordagem é chamada VLBL ou base longa virtual. Se não precisarmos fixar a pista do movimento do objeto subaquático, mas simplesmente determinar sua localização, é disso que precisamos.
Muitas vezes, esse problema surge ao instalar qualquer equipamento de fundo por descarga livre do navio. Com profundidades tangíveis e a presença de correntes, a posição real do equipamento na parte inferior pode diferir significativamente da posição do ponto em que foi despejado. Este equipamento também pode ser um elemento da base de navegação inferior: para determinar a localização de um objeto subaquático, você deve primeiro determinar a localização do objeto subaquático.
Então, como tudo isso pode ser organizado no mundo real?
Nossa configuração experimental consiste em:
- o objeto que esconderemos na parte inferior do reservatório: nosso modem de código RedGTR em uma versão autônoma (parece oficial, de fato - um modem conectado a uma caixa de bateria selada); Aqui está na foto:

Figura 7 - Sinalizador de resposta com caixa de bateria
- uma estação base móvel baseada em um barco de isco chinês do nosso outro artigo . Além do sistema de controle nativo, ela possui um segundo modem RedGTR, um módulo de rádio DORJI de 433 MHz com uma antena, um módulo GPS / GLONASS caseiro baseado no quectel l76, sua própria placa-mãe baseada no STM32F429 (pode ser facilmente substituída pelo NUCLEO-STM429 ou STM32F4 Discovery Tenho certeza de que qualquer placa semelhante ao Arduino também o faria) que simplesmente desempenha o papel de um roteador: tudo vai para o modem a partir do canal de rádio via UART e vice-versa, os dados do módulo GPS também são transmitidos para o canal de rádio.
Portanto, parece uma montagem:

Figura 8 - Foto do conjunto da embarcação de teste
Desta vez, fixamos uma espécie de travessão para prender uma haste com um modem, a experiência de um navegador rebocado livremente revelou a crueldade desse esquema, tanto em termos de controlabilidade quanto em termos de mudança de posição relativa do dispositivo e do barco.
Portanto, parece no porão:
Figura 9 - Foto de uma embarcação de teste. Vista do porão
Todos os circuitos nativos permaneceram quase inalterados e todo o equipamento adicional é alimentado por uma bateria de chumbo separada a 1,2 A * h.
- o console do operador, que inclui um laptop com software e um módulo de rádio de resposta conectado via USB ao conversor. Obviamente, o software é um tanto precipitado e é adequado apenas para demonstração, mas já existe um protocolo para interagir com um modem, um solucionador TOA, baseado no mesmo método Nelder-Mead, seleção de pontos de base, desenho simples de localizações geográficas, além da capacidade de emular o GPS para transferência de dados. algum análogo do Google Earth.
Figura 10 - “Console do operador”. Teste executado na mesa.
Os pontos azuis representam a posição GPS do barco, os pontos verdes indicam as posições em que as medições foram realizadas, as posições dos elementos de base virtuais são destacadas pelo salmão e as posições calculadas do farol de resposta são destacadas em vermelho.
Quem está ocupado com o quê?
- o modem que você deseja encontrar, fica na parte inferior, recebe e responde às solicitações;
- o modem que está no barco executa comandos que chegaram via UART - envia solicitações e recebe respostas, conforme relatado pela UART
- a placa com STM32F4 no barco recebe dados do GPS e do modem via UART e os redireciona para o módulo de rádio por outro UART e redireciona os dados do módulo de rádio para o modem; Há uma pequena nuance relacionada ao módulo de rádio - não é full duplex (como no hidroacústico =)); portanto, a placa “retém” a mensagem RMC do módulo GPS e a envia apenas junto com a mensagem do modem;
- o software de controle remoto controla toda a ação, coleta dados sobre distâncias do alvo de diferentes localizações geográficas, seleciona a base ideal e determina a localização do alvo;
Um pouco mais detalhado
A comunicação com modems ocorre através de um protocolo semelhante ao NMEA. Para nossa tarefa, apenas três mensagens são usadas:
$PTNTE,targetAddr,requestedCmd,timeoutMs*hhdo controle remoto para o modem. Envie o comando requestCmd para o assinante remoto em
targetAddr , defina o tempo limite da resposta como timeoutMs.
O comando pode ser qualquer uma da lista aprovada:
| A equipe | Código | Descrição do produto |
|---|
| CDS_CMD_PING | 0 0 | Solicitação PING à qual o assinante remoto responde PONG |
| CDS_CMD_PONG | 1 | Responder à solicitação PING |
| CDS_CMD_DPT | 2 | Comande o assinante remoto para transmitir sua profundidade |
| CDS_CMD_TMP | 3 | Comande o assinante remoto para transferir sua temperatura |
| CDS_CMD_BAT | 4 | O comando para o assinante remoto transmitir a tensão de sua potência |
| CDS_CMD_USR_0 | 5 | Equipe de usuários 1 |
| CDS_CMD_USR_1 | 6 | Equipe do usuário 2 |
| .. | .. | .. |
| CDS_CMD_USR_34 | 39. | Equipe do usuário 34 |
O modem suporta funções básicas: ping, profundidade de transmissão, temperatura da água, energia da bateria e um conjunto de comandos de código do usuário.
O modem responde imediatamente ao comando TNTE sobre o fato de aceitar o comando ou a incapacidade de executá-lo com a mensagem ACK:
$PTNT0,errCodeerrCode - 0 se o modem aceitou o comando, caso contrário, o código de erro
Se o modem não esperou que o assinante remoto respondesse a tempo, ele relatou isso com uma mensagem
REM_TIMEOUT contendo apenas o endereço do assinante remoto no campo de parâmetro:
$PTNTB,targetAddrSe o modem recebeu a resposta dentro do prazo, ele informa isso com o comando
REM_PONGEX , que tem o seguinte formato:
$PTNTD,requestedAddr,requestedCmd,receivedValue_decoded,snrd,dpl,pTime,[dst],[dpt],[tmp]requestedAddr - endereço do assinante solicitado
requestedCmd - comando solicitado
receivedValue_decoded - valor aceito
snrd - relação sinal / ruído na saída do receptor em dB
dpl - deslocamento do Doppler em Hz
pTime - tempo de propagação do sinal (ida) em segundos
dst - distância para o assinante em metros
dpt - profundidade do modem em metros
tmp - temperatura da água externa em graus Celsius
Os últimos três parâmetros são transmitidos apenas se o modem for projetado com um sensor de pressão / temperatura integrado (nossa opção).
No módulo GPS, estamos interessados apenas na mensagem RMC, de onde obtemos a posição geográfica atual (poderíamos usar GGA ou GLL - a última mais curta).
A coisa mais difícil - transmitir dados pela água e medir a distância - é feita por modems, determinando a posição geográfica do barco - módulo GPS, resta apenas um pouco - para usar corretamente esses dados.
Toda análise e construção de mensagens NMEA é executada usando a classe NMEAParser na biblioteca
UCNLNMEA .
O software do console em execução no laptop envia periodicamente solicitações
REM_PINGEX para o assinante no endereço especificado nas configurações do aplicativo, isso é feito após o recebimento de
REM_TIMEOUT ou
REM_PONGEX . Ao longo do caminho, as coordenadas do barco são registradas e os dados sobre a distância e profundidade do assinante remoto são armazenados juntamente com as coordenadas do barco em que foram recebidos.
O senso comum (e a experiência) nos diz que, para determinar a posição de um objeto subaquático, são necessárias 3-5 estações-base virtuais e, como pode ser visto nas figuras acima, elas não devem ser localizadas de maneira alguma.
Ou seja, a seguinte tarefa é formada: conforme as medidas são recebidas, é necessário selecionar várias delas como elementos da base de navegação de uma certa maneira.
Proponho a seguinte opção: escolha essas medidas para que elas formem a figura mais convexa descrita em torno da localização estimada do objeto posicionado.
Para fazer isso, pegue um determinado ponto (no estágio inicial, quando não estiver claro onde está o objeto posicionado, o ponto médio de todas as medições surgirá, que será substituído pela primeira aproximação da posição do objeto desejado) e calcule o ângulo de azimute a partir dele (o ângulo entre a direção para o norte e a direção para ponto) para cada ponto de medição. E agora vamos selecionar alguns que cobririam de maneira mais uniforme o intervalo de ângulos resultante. No controle remoto, isso é feito pelo método
List<Measurement> Measurements.GetBase();
À medida que os dados chegam, no método em que a mensagem REM_PONGEX é
REM_PONGEX , adicionamos medidas e tentamos construir uma base de navegação e resolver o problema de navegação com ela. O método é responsável por isso.
GeoPoint3DWE LocateLBL_NLM(List<Measurements> base, GeoPoint3DWE prevLocation, double rErrorThreshold, out double stStageRErr, out int itCnt);
A base em si é transferida para ele - o conjunto de medidas que selecionamos para resolver o problema de navegação, a posição anterior (se houver, a profundidade do objeto desejado também é transmitida para lá), o limiar de erro radial e dois parâmetros de saída de diagnóstico - o erro radial no primeiro estágio da solução (de acordo com otimização unidimensional) e o número de iterações, após o qual a solução foi obtida no segundo estágio.
Se a solução com a qual estamos satisfeitos for devido a um erro radial, usaremos essa solução como ponto de referência para a construção da base.
E assim, até ficarmos cansados, teremos uma solução que nos satisfaça.
O método
LocateLBL_NLM , como o nome indica, resolve o problema
usando o método Nelder-Mead , executando previamente a otimização unidimensional se não houver solução anterior. Na realidade, você pode não estar vinculado ao resultado anterior, mas aplique a otimização unidimensional constantemente - a estratégia pode ser diferente e depende de condições específicas.
Por uma questão de simplicidade, a solução é realizada em metros, para a qual, antes do início da solução, todas as coordenadas são transferidas para o sistema local, com a origem no ponto médio da base de navegação. Após a solução, o resultado é convertido novamente em longitude e latitude geográfica (longitude é X e latitude é Y). Para converter graus em metros e vice-versa, a classe Navigation contém os métodos GetDistance2DDeg e Meters2Deg.
Mas, como você sabe, uma teoria sem prática está morta, e é hora de passar para os resultados de experimentos de campo.
Vamos reviver a teoria com verificação prática
De acordo com a antiga tradição, realizamos testes na
foz do rio Pichuga . É um local conveniente, existem profundidades de quase 30 metros e uma área de água bastante complicada.
O farol do réu é montado em um suporte de haste especial (varandas de espuma de espuma e uma âncora que ajuda toda a estrutura a permanecer na posição vertical não foram incluídas no quadro):
 Figura 11 - Respondente de baliza “Estação inferior”
Figura 11 - Respondente de baliza “Estação inferior”A instalação do farol foi filmada em
vídeo , eles não foram calculados nem um pouco com a luz e esqueceram de trazer uma lanterna com eles, para que o momento de contato com o solo permanecesse escondido na escuridão.
Enquanto estavam prestes a testar, deram um nome ao barco:
 Figura 12 - “Palych” no ambiente natural
Figura 12 - “Palych” no ambiente naturalNo painel de popa "Palychu", as presilhas de nylon prendiam um pedaço da vara de pescar, na qual o modem RedGTR está localizado (para não sair e aparecer).
O experimento consistiu no fato de que o farol do réu está instalado na parte inferior, apenas um pequeno flutuador se destaca dele, enquanto “Palych”, controlado a partir da costa, anda pela área da água em grandes círculos, o controle remoto solicita periodicamente algo do réu, por exemplo, sua profundidade . Todos os dados são gravados no log e tudo é exibido na tela de acordo com o estado real das coisas. Assim:
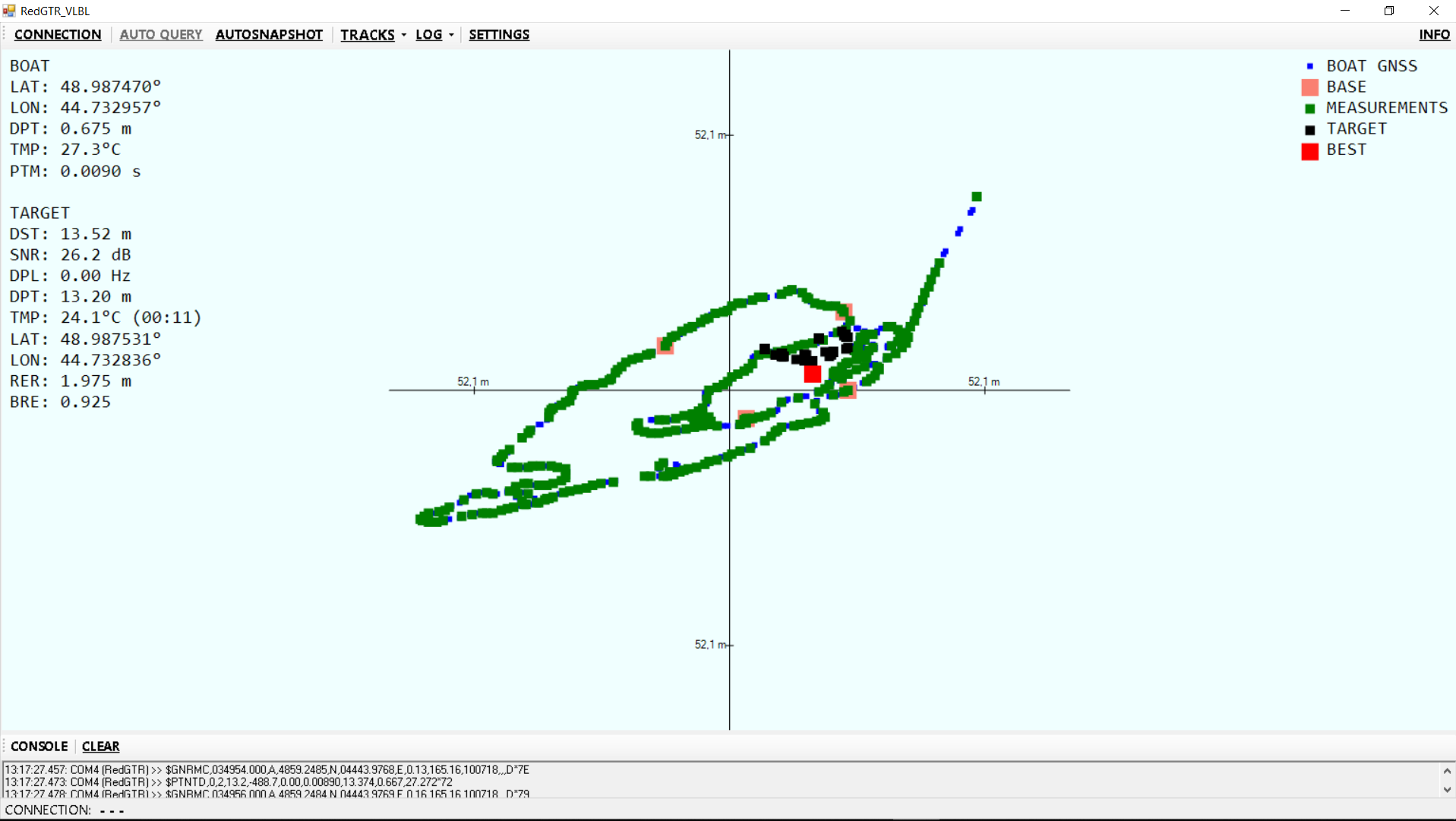 Figura 13 - Uma captura de tela do software de controle remoto com a trajetória do barco e as posições calculadas do farol de resposta (a melhor posição calculada é mostrada em vermelho)
Figura 13 - Uma captura de tela do software de controle remoto com a trajetória do barco e as posições calculadas do farol de resposta (a melhor posição calculada é mostrada em vermelho)Como pode ser visto na Figura 13, o farol estava localizado a uma profundidade de 13,2 m, e a temperatura da água a essa profundidade era de 24,1 ° C.
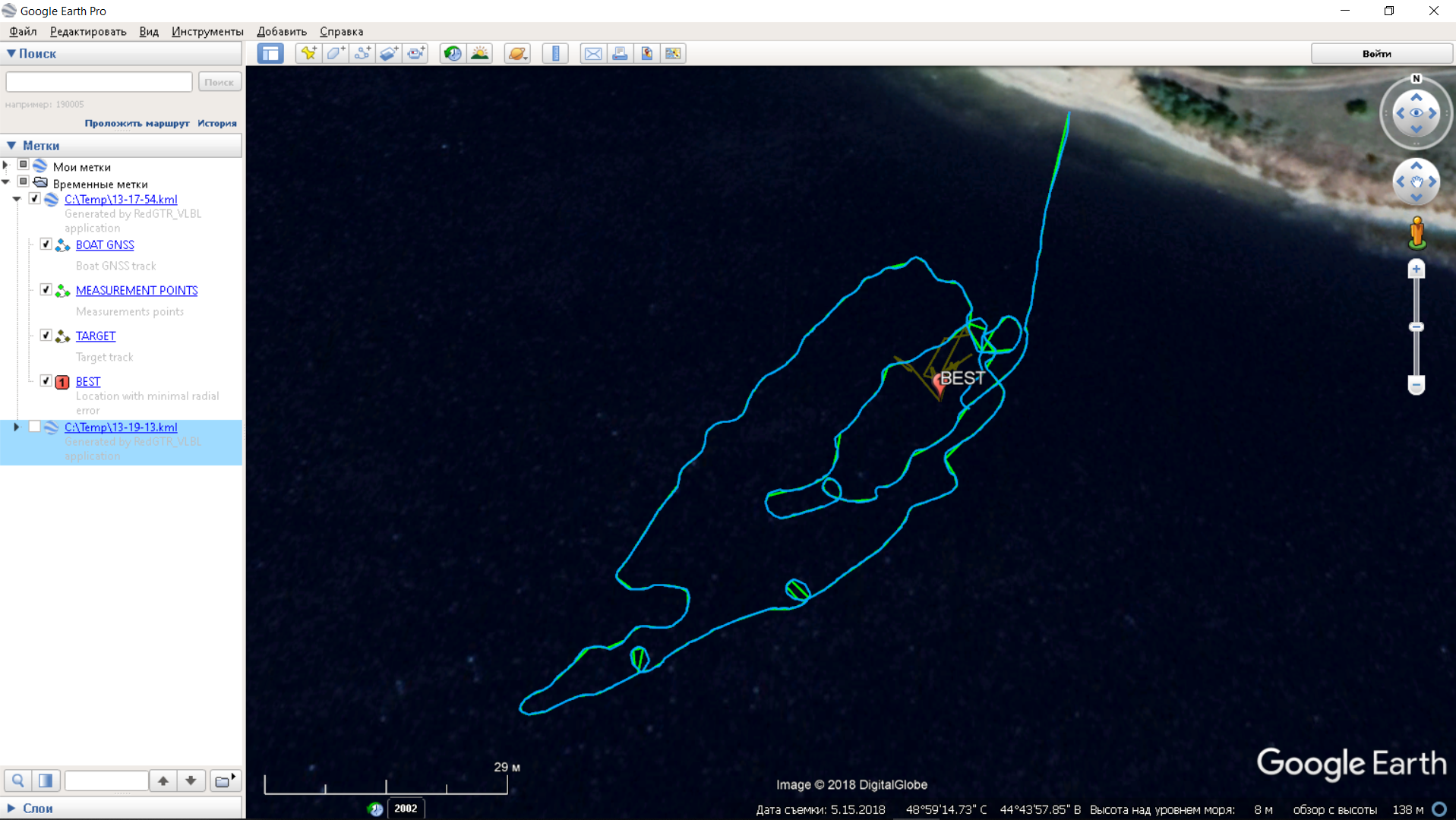 Figura 14 - Importando faixas recebidas no GoogleEarth
Figura 14 - Importando faixas recebidas no GoogleEarthConseguir um bom resultado nesse caso levou cerca de 15 minutos de natação a partir da força.
No segundo experimento, o farol foi instalado a uma profundidade de 16,5 metros, onde o esperado era um pouco mais frio - apenas 22,6 ° C.
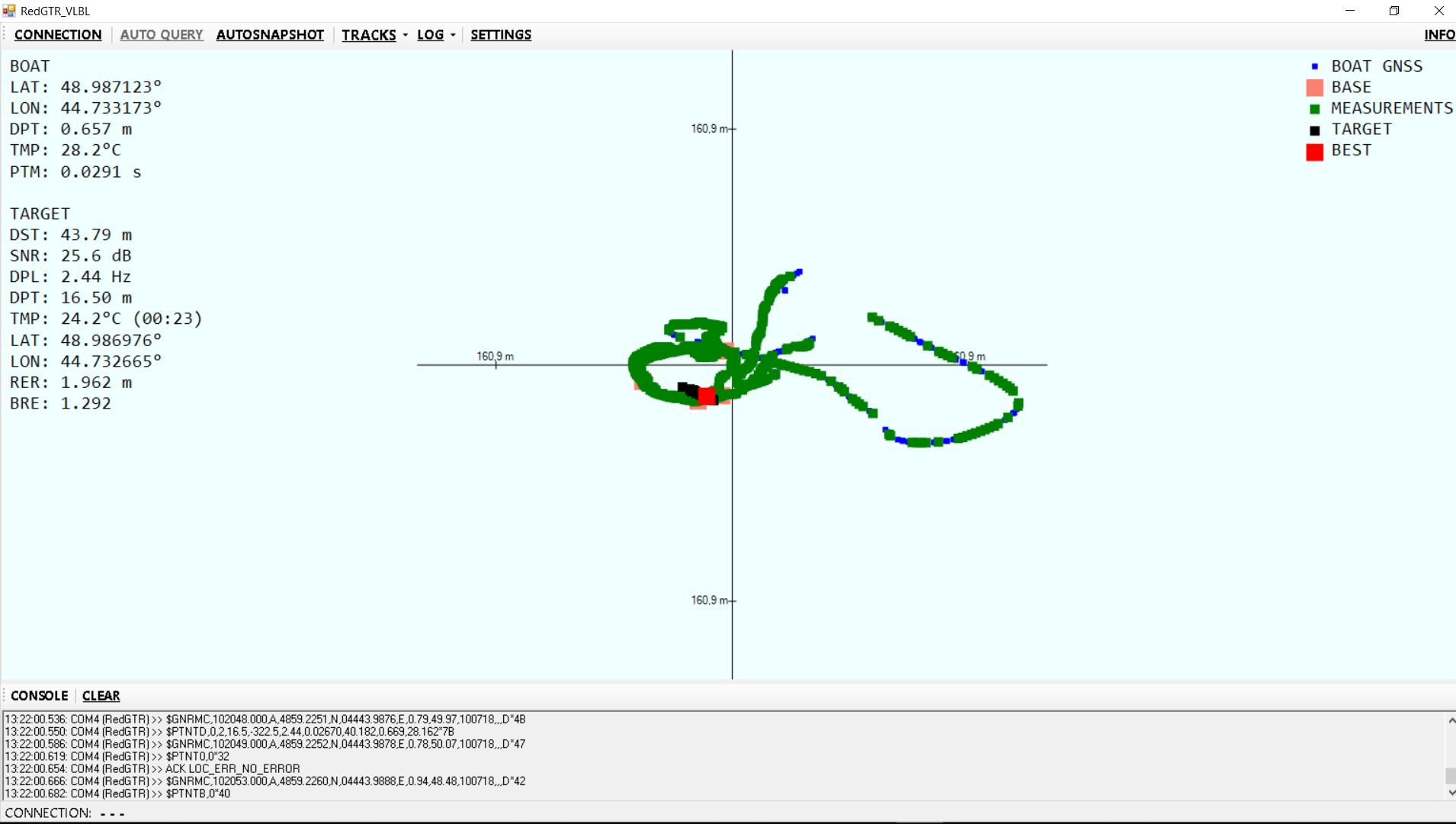 Figura 15 - o resultado da determinação da localização do sinalizador de resposta no segundo experimento na tela do software de controle remoto
Figura 15 - o resultado da determinação da localização do sinalizador de resposta no segundo experimento na tela do software de controle remotoNesse caso, não lidamos com a avaliação correta da precisão devido à aguda falta de tempo (de fato, esses testes engraçados causaram algum atrito entre a gerência, porque foram arrancados do trabalho) e ficamos satisfeitos com o fato de a embarcação ter flutuado (esse momento pode ser visto no
primeiro track ), então, em termos de posição, coincidiu completamente com a melhor solução e a distância coincidiu com a profundidade (com a diferença entre as profundidades do respondedor e o modem instalado no navio). Os pontos nos quais as balizas foram zeradas foram fixados e a discrepância entre a posição calculada e os pontos de descarga está na região de 2 a 3 metros, o que confirma adicionalmente a operabilidade do sistema.
Em geral, podemos dizer que essa prova de conceito foi concluída com sucesso!
Recebemos verdadeiro prazer e queimaduras solares, teremos o maior prazer em responder a perguntas e ouvir críticas!
Posfácio
O fato triste é que os modems usados neste experimento, embora sejam muito baratos pelos padrões do mercado mundial de comunicação hidroacústica, ainda não são muito acessíveis aos amadores.
Para não ser infundado, darei um link para o
excelente trabalho de Miss Benson, que na página 54 do PDF ou 36 da numeração de documentos tem uma placa interessante com preços para alguns modens de sonar a partir de 2010. Essas coisas. (Há um pequeno erro na tabela - o alcance da comunicação Range para o modem que ela está desenvolvendo é indicado em metros, enquanto o cabeçalho da coluna é km).
A boa notícia é que, de repente, desenvolvemos modems que podem fazer quase o mesmo (um pouco menor (de fato, o menor do mundo e antes deles os menores também eram nossos - deste artigo), o alcance da comunicação é menor , velocidade de transmissão mais baixa) e, de acordo com nossas estimativas, eles já são bastante animadores para os entusiastas da riqueza. No momento, os componentes eletrônicos e o firmware estão completamente prontos e estamos concluindo a solução do caso. No final do desenvolvimento, publicaremos um artigo com os resultados de uma verificação experimental.
Atenção! Pesquisa: