Chegou o
outono , o
repolho floresceu , é quase meio do inverno e acabei de mexer nele. Ainda assim, chegou o momento em que você deseja reproduzir algo antigo, ao som de uma tempestade de neve do lado de fora da janela, por exemplo, o Sonic ou o verme de Jim. No final do artigo, há um vídeo com resultados preliminares.

Se você jogou jogos SMD no emulador, provavelmente percebeu que o game pad mais conveniente para esses jogos é o gamepad nativo do SMD. Para a maioria dos outros consoles, ao jogar no emulador, é bem possível conviver com o mesmo gamepad Xbox ou Logitech, o padrão foi formado no final dos anos 90. Mas até o final dos anos 90, todo mundo se esforçava ao máximo.
Não é difícil comprar um gamepad da SMD e, como regra, você pode comprá-lo onde os clones dos próprios consoles são vendidos, a um preço bastante acessível, cerca de 300 rublos.
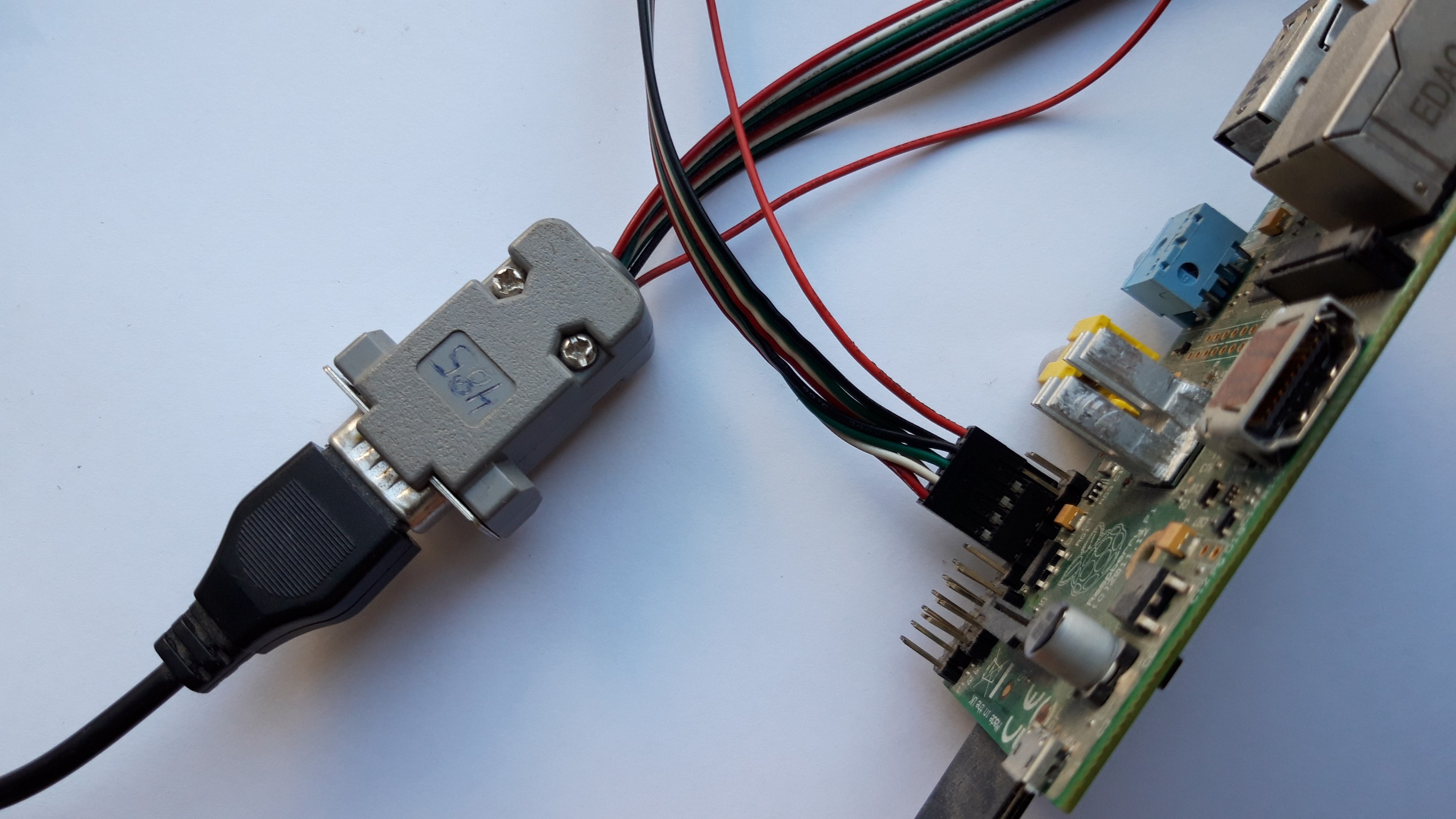
Como antes, organizei a conexão com o Raspberry pi usando um cabo USB do gabinete descomissionado e o conector DB-9 do pai. E o GPIO tirou as conclusões do programa. O gamepad funciona muito bem a partir de 3,3 Volts.
Como sempre, surgiu a pergunta sobre a escolha de um emulador, e a melhor opção foi o emulador - Picodrive, ele é otimizado para ARM, bem estruturado e, pelo que entendi, faz parte da montagem RetroPi. Mas com a montagem tive que mexer um pouco. O código fonte está localizado no serviço Github,
neste endereço .
Para construir, precisamos de 3 componentes de sucesso do repositório do autor do emulador:
- Próprio emulador Picodrive;
- Emulador de CPU - cyclone68000;
- e FrontEnd - Libpicofe.
Agora tudo isso precisa ser montado corretamente. Descompacte ou não descompacte o
Picodrive , dependendo de como você o baixou. Agora abra o diretório com
cyclone68000 , seu conteúdo deve ser copiado para o diretório:
/ /picodrive-master/cpu/cyclone
Você também precisa
lidar com o conteúdo do diretório
Libpicofe , seu conteúdo é copiado para o diretório:
/ /picodrive-master/platform/libpicofe
Agora você precisa se preparar para a montagem:
fazer configuração
sudo ./configure
Após a conclusão da configuração, um arquivo será criado -
config.mak , nele você precisará encontrar e alterar algumas linhas. Abaixo está o resultado final:
AS = arm-linux-as LDLIBS += -L/usr/lib/arm-linux-gnueabihf -lSDL -lasound -lpng -lm -lz -lwiringPi ARCH = arm PLATFORM = rpi1
Em seguida, você precisa editar o arquivo -
config.h . Está localizado no diretório:
/ /picodrive-master/cpu/cyclone
Nele, você precisa colocar os nas variáveis:
#define HAVE_ARMv6 1 #define CYCLONE_FOR_GENESIS 1
E agora a parte do softwareComo sempre, foi necessário encontrar um local onde as informações sobre os botões pressionados sejam processadas, entender
e perdoar o código e substituí-lo.
Sem capturar suspense, direi imediatamente que os arquivos que você está procurando estão localizados no diretório:
/ /picodrive-master/pico/
Aqui estamos interessados em 3 arquivos -
pico.c ,
memory.c ,
memory.h . Provavelmente você pode fazer com um número menor e juntar tudo em um, mas me pareceu mais fácil.
E assim, no arquivo
pico.c, inicializo a biblioteca e configuro inicialmente os pinos do GPIO.
Imediatamente darei parte do cabeçalho do arquivo:
#include "pico_int.h" #include "sound/ym2612.h" #include <wiringPi.h> #define Data0 3 #define Data1 4 #define Data2 5 #define Data3 12 #define Data4 13 #define Data5 10 #define Select 6 struct Pico Pico; struct PicoMem PicoMem; PicoInterface PicoIn;
Como você pode ver, o cabeçalho da biblioteca
WiringPi é
definido e as
definições são anunciadas, que aparecerão um pouco mais baixas. Bem, por exemplo, agora na função
void PicoInit (void) :
void PicoInit(void) { ... ... PicoDraw2Init(); wiringPiSetup (); pinMode (Select, OUTPUT); pinMode (Data0, INPUT); pinMode (Data1, INPUT); pinMode (Data2, INPUT); pinMode (Data3, INPUT); pinMode (Data4, INPUT); pinMode (Data5, INPUT); digitalWrite (Select, HIGH); }
Esta é uma função de inicialização da memória do emulador (mais ou menos). E foi aqui que inseri todas as configurações dos pinos GPIO.
Aqui está a pinagem do conector DB-9 .
Aqui devo dizer que o gamepad possui 6 contatos de informação (Dados0 ... Dados5), um controlador (Selest) e energia.
Em seguida, temos as mesmas definições - defina, precisamos repeti-las novamente. Isso pode ser feito tanto na
memória.he na
memória.c . Eu escolhi a primeira opção. Não faz sentido listar isso.
Então chegamos ao mais interessante - o arquivo
memory.c . Possui 2 funções com nomes eloquentes:
static u32 read_pad_3btn(int i, u32 out_bits) static u32 read_pad_6btn(int i, u32 out_bits)
Os nomes parecem sugerir discretamente a leitura do status dos gamepads de 3 e 6 botões.
Aqui, deve ser esclarecido que qualquer gamepad de 6 botões pode funcionar como um de 3 botões. E a parte do leão dos jogos funciona exatamente com este modo do gamepad. Nesse modo, uma vez a cada 16 milissegundos, o status da saída Selecionar muda. Quando Selecionar = 0, os valores dos botões são lidos - UP, DOWN, A, Start. Quando Selecionar = 1, o estado dos botões é lido - ACIMA, ABAIXO, ESQUERDA, DIREITA, B, C. Abaixo está um exemplo de como esse modo funciona.
Imediatamente darei uma lista dessa função com as alterações:
static u32 read_pad_3btn(int i, u32 out_bits) { u32 pad = ~PicoIn.padInt[i];
Aqui
i é o número do gamepad e a expressão
if (out_bits & 0x40) // TH é apenas responsável pelo status da saída Select. Vale ressaltar que no emulador o estado dos botões é fornecido da mesma forma que no console. Botão pressionado = 0.
Aqui está o resultado do trabalho:
Continua na próxima série,
Pip-Pip-Pip