Mapa
Em um
artigo anterior, analisei o que é o novo
sistema de tarefas, como funciona, como criar tarefas, preenchê-las com dados e executar cálculos multiencadeados e apenas expliquei brevemente onde você pode usar esse sistema. Neste artigo, tentarei analisar um exemplo específico de onde você pode usar esse sistema para obter mais desempenho.
Como o sistema foi originalmente desenvolvido com o objetivo de trabalhar com dados, é ótimo para resolver tarefas de localização de caminhos.
O Unity já possui um bom
navegador NavMesh , mas não funciona em projetos 2D, embora existam muitas soluções prontas no mesmo
ativo . Bem, e tentaremos criar não apenas um sistema que procure maneiras no mapa criado, mas tornar esse mapa dinâmico, para que toda vez que algo mude nele, o sistema criará um novo mapa, e tudo isso, é claro, calcularemos usando um novo sistema de tarefas, para não carregar o thread principal.
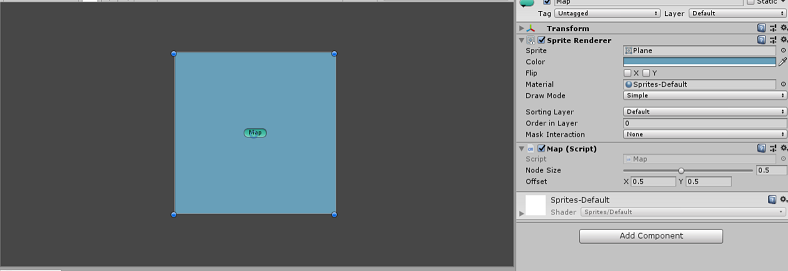
Exemplo de operação do sistema No exemplo, uma grade é construída no mapa, há um bot e um obstáculo. A grade é reconstruída toda vez que alteramos quaisquer propriedades do mapa, seja seu tamanho ou posição.
Para aviões, usei um
SpriteRenderer simples, este componente possui uma excelente propriedade de
limites com a qual você pode descobrir facilmente o tamanho do mapa.
Isso é basicamente tudo para começar, mas não vamos parar e começar imediatamente aos negócios.
Vamos começar com os scripts. E o primeiro é o script de obstrução de
obstáculos .
Obstáculopublic class Obstacle : MonoBehaviour { }
Dentro da classe
Obstacle , capturaremos todas as alterações nos obstáculos no mapa, por exemplo, alterando a posição ou o tamanho de um objeto.
Em seguida, você pode criar a classe de mapa
Map , na qual a grade será construída, e herdá-la da classe
Obstacle .
Mapa public sealed class Map : Obstacle { }
A classe
Map também rastreará todas as alterações no mapa para reconstruir a grade, se necessário.
Para fazer isso, preencha a classe base
Obstacle com todas as variáveis e métodos necessários para controlar as alterações no objeto.
Obstáculo public class Obstacle : MonoBehaviour { public new SpriteRenderer renderer { get; private set;} private Vector2 tempSize; private Vector2 tempPos; protected virtual void Awake() { this.renderer = GetComponent<SpriteRenderer>(); this.tempSize = this.size; this.tempPos = this.position; } public virtual bool CheckChanges() { Vector2 newSize = this.size; float diff = (newSize - this.tempSize).sqrMagnitude; if (diff > 0.01f) { this.tempSize = newSize; return true; } Vector2 newPos = this.position; diff = (newPos - this.tempPos).sqrMagnitude; if (diff > 0.01f) { this.tempPos = newPos; return true; } return false; } public Vector2 size { get { return this.renderer.bounds.size;} } public Vector2 position { get { return this.transform.position;} } }
Aqui, a variável
renderer terá uma referência ao componente
SpriteRenderer , e as
variáveis tempSize e
tempPos serão usadas para rastrear alterações no tamanho e na posição do objeto.
O método virtual
Awake será usado para inicializar as variáveis, e o método virtual
CheckChanges rastreará as alterações atuais no tamanho e posição do objeto e retornará um resultado
booleano .
Por enquanto, vamos deixar o script
Obstacle e seguir para o script
Map map, onde também o preenchemos com os parâmetros necessários para o trabalho.
Mapa public sealed class Map : Obstacle { [Range(0.1f, 1f)] public float nodeSize = 0.5f; public Vector2 offset = new Vector2(0.5f, 0.5f); }
A variável
nodeSize indicará o tamanho das células no mapa.
Limitei seu tamanho de 0,1 a 1 para que as células na grade não sejam muito pequenas, mas também muito grandes. A variável de
deslocamento será usada para recuar o mapa ao construir a grade, para que a grade não seja construída ao longo das bordas do mapa.
Como agora existem duas novas variáveis no mapa, verifica-se que suas alterações também precisarão ser rastreadas. Para fazer isso, adicione algumas variáveis e sobrecarregue o método
CheckChanges na classe
Map .
Mapa public sealed class Map : Obstacle { [Range(0.1f, 1f)] public float nodeSize = 0.5f; public Vector2 offset = new Vector2(0.5f, 0.5f); private float tempNodeSize; private Vector2 tempOffset; protected override void Awake() { base.Awake(); this.tempNodeSize = this.nodeSize; this.tempOffset = this.offset; } public override bool CheckChanges() { float diff = Mathf.Abs(this.tempNodeSize - this.nodeSize); if (diff > 0.01f) { this.tempNodeSize = this.nodeSize; return true; } diff = (this.tempOffset - this.offset).sqrMagnitude; if (diff > 0.01f) { this.tempOffset = this.offset; return true; } return base.CheckChanges(); } }
Feito. Agora você pode criar um sprite de mapa no palco e lançar um script de
mapa nele.
Faremos o mesmo com um obstáculo - crie um sprite simples no palco e jogue o script
Obstacle nele.
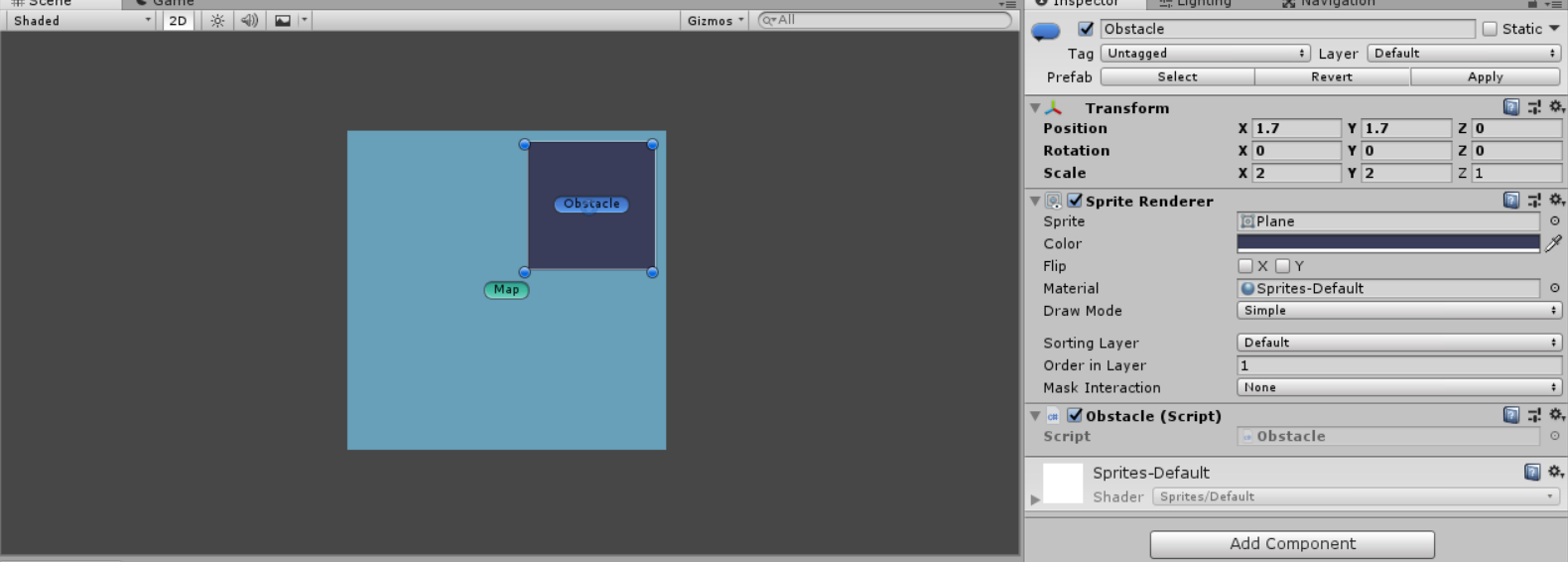
Agora, temos objetos de mapa e obstáculos no palco.
O script
Map será responsável por rastrear todas as alterações no mapa, onde, no método
Update , verificaremos cada quadro quanto às alterações.
Mapa public sealed class Map : Obstacle { private bool requireRebuild; private void Update() { UpdateChanges(); } private void UpdateChanges() { if (this.requireRebuild) { print(“ , !”); this.requireRebuild = false; } else { this.requireRebuild = CheckChanges(); } } }
Portanto, no método
UpdateChanges, o mapa rastreará apenas suas alterações até o momento. Você pode até iniciar o jogo agora e tentar alterar o tamanho do mapa ou
compensar o deslocamento para garantir que todas as alterações sejam rastreadas.
Agora você precisa acompanhar de alguma forma as mudanças dos obstáculos no mapa. Para fazer isso, colocaremos cada obstáculo em uma lista no mapa, que por sua vez atualizará cada quadro no método
Update .
Na classe
Mapa , crie uma lista de todos os obstáculos possíveis no mapa e alguns métodos estáticos para registrá-los.
Mapa public sealed class Map : Obstacle { private static Map ObjInstance; private List<Obstacle> obstacles = new List<Obstacle>(); public static bool RegisterObstacle(Obstacle obstacle) { if (obstacle == Instance) return false; else if (Instance.obstacles.Contains(obstacle) == false) { Instance.obstacles.Add(obstacle); Instance.requireRebuild = true; return true; } return false; } public static bool UnregisterObstacle(Obstacle obstacle) { if (Instance.obstacles.Remove(obstacle)) { Instance.requireRebuild = true; return true; } return false; } public static Map Instance { get { if (ObjInstance == null) ObjInstance = FindObjectOfType<Map>(); return ObjInstance; } } }
No método estático
RegisterObstacle , registraremos um novo obstáculo no mapa e o adicionaremos à lista, mas, antes de tudo, é importante considerar que o próprio mapa também é herdado da classe
Obstacle e, portanto, devemos verificar se estamos tentando registrar o cartão como um obstáculo.
O método estático
UnregisterObstacle , pelo contrário, elimina o obstáculo do mapa e o remove da lista quando permitimos que ele seja destruído.
Ao mesmo tempo, toda vez que adicionamos ou removemos um obstáculo do mapa, é necessário recriar o mapa em si; portanto, após a execução desses métodos estáticos, defina a variável
requireRebuild como
true .
Além disso, para ter acesso fácil ao script
Map a partir de qualquer script, criei uma propriedade
Instance estática que retornará para mim essa mesma instância do
Map .
Agora, voltemos ao script
Obstacle, onde registraremos um obstáculo no
mapa.Para fazer isso, adicione alguns métodos
OnEnable e
OnDisable a ele.
Obstáculo public class Obstacle : MonoBehaviour { protected virtual void OnEnable() { Map.RegisterObstacle(this); } protected virtual void OnDisable() { Map.UnregisterObstacle(this); } }
Cada vez que criamos um novo obstáculo enquanto jogamos no mapa, ele será registrado automaticamente no método
OnEnable , onde será levado em consideração ao criar uma nova grade e nos removeremos do mapa no método
OnDisable quando ele for destruído ou desativado.
Resta apenas rastrear as alterações dos obstáculos no script
Map no método
CheckChanges sobrecarregado.
Mapa public sealed class Map : Obstacle { public override bool CheckChanges() { float diff = Mathf.Abs(this.tempNodeSize - this.nodeSize); if (diff > 0.01f) { this.tempNodeSize = this.nodeSize; return true; } diff = (this.tempOffset - this.offset).sqrMagnitude; if (diff > 0.01f) { this.tempOffset = this.offset; return true; } foreach(Obstacle obstacle in this.obstacles) { if (obstacle.CheckChanges()) return true; } return base.CheckChanges(); } }
Agora temos um mapa, obstáculos - em geral, tudo o que você precisa para construir uma grade e agora pode passar para a coisa mais importante.
Malha
A grade, em sua forma mais simples, é uma matriz bidimensional de pontos. Para construí-lo, você precisa conhecer o tamanho do mapa e o tamanho dos pontos, depois de alguns cálculos, obtemos o número de pontos horizontal e verticalmente, esta é a nossa grade.
Existem muitas maneiras de encontrar um caminho em uma grade. Neste artigo, no entanto, o principal é entender como usar corretamente os recursos do sistema de tarefas; portanto, não considerarei opções diferentes para encontrar o caminho, suas vantagens e desvantagens, mas utilizarei a opção de pesquisa mais simples
A * .
Nesse caso, todos os pontos na grade devem ter, além da posição, as coordenadas e a propriedade de permeabilidade.
Com permeabilidade, acho que tudo fica claro por que é necessário, mas as coordenadas indicam a ordem do ponto na grade, essas coordenadas não estão ligadas especificamente à posição do ponto no espaço. A imagem abaixo mostra uma grade simples, mostrando as diferenças de coordenadas de uma posição.
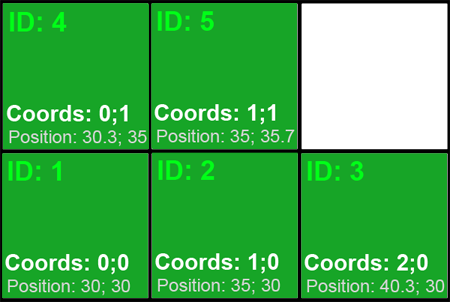 Por que as coordenadas?
Por que as coordenadas?O fato é que, em unidade, para indicar a posição de um objeto no espaço,
é usado um
flutuador simples que é muito impreciso e pode ser um número fracionário ou negativo; portanto, será difícil usá-lo para implementar uma pesquisa de caminho no mapa. As coordenadas são feitas na forma de um
int claro, que sempre será positivo e com o qual é muito mais fácil trabalhar ao procurar pontos vizinhos.
Primeiro, vamos definir um objeto de ponto, essa será uma estrutura de
nó simples.
Nó public struct Node { public int id; public Vector2 position; public Vector2Int coords; }
Essa estrutura conterá a posição
position na forma de
Vector2 , onde, com essa variável, desenharemos um ponto no espaço. A
variável de coordenadas de
coords na forma de
Vector2Int indicará as coordenadas de um ponto no mapa, e a variável
id , seu número numérico de conta, usando-o, compararemos diferentes pontos na grade e verificaremos a existência de um ponto.
A perviedade do ponto será indicada na forma de sua propriedade
booleana , mas como não podemos usar os
tipos de dados
conversíveis no sistema de tarefas, indicaremos sua perviedade na forma de um número
int , para isso usei uma enumeração simples
NodeType , em que: 0 não é um ponto passável, e 1 é aceitável.
NodeType e Node public enum NodeType { NonWalkable = 0, Walkable = 1 } public struct Node { public int id; public Vector2 position; public Vector2Int coords; private int nodeType; public bool isWalkable { get { return this.nodeType == (int)NodeType.Walkable;} } public Node(int id, Vector2 position, Vector2Int coords, NodeType type) { this.id = id; this.position = position; this.coords = coords; this.nodeType = (int)type; } }
Além disso, para facilitar o trabalho com um ponto, sobrecarregarei o método
Equals para facilitar a comparação de pontos e também complementarei o método de verificação para a existência de um ponto.
Nó public struct Node { public override bool Equals(object obj) { if (obj is Node) { Node other = (Node)obj; return this.id == other.id; } else return base.Equals(obj); } public static implicit operator bool(Node node) { return node.id > 0; } }
Como o número de
identificação do ponto na grade começará com 1 unidade, vou verificar a existência do ponto como uma condição para que sua
identificação seja maior que 0.
Vá para a classe
Map, onde prepararemos tudo para criar um mapa.
Já temos uma verificação para alterar os parâmetros do mapa, agora precisamos determinar como o processo de construção da grade será realizado. Para fazer isso, crie uma nova variável e vários métodos.
Mapa public sealed class Map : Obstacle { public bool rebuilding { get; private set; } public void Rebuild() {} private void OnRebuildStart() {} private void OnRebuildFinish() {} }
A propriedade
reconstruir indicará se o processo de
malha está em andamento. O método
Rebuild coletará dados e tarefas para a construção da grade, o método
OnRebuildStart iniciará o processo de criação da grade e o método
OnRebuildFinish coletará dados das tarefas.
Agora vamos mudar um
pouco o método
UpdateChanges para que a condição da grade seja levada em consideração.
Mapa public sealed class Map : Obstacle { public bool rebuilding { get; private set; } private void UpdateChanges() { if (this.rebuilding) { print(“ ...”); } else { if (this.requireRebuild) { print(“ , !”); Rebuild(); } else { this.requireRebuild = CheckChanges(); } } } public void Rebuild() { if (this.rebuilding) return; print(“ !”); OnRebuildStart(); } private void OnRebuildStart() { this.rebuilding = true; } private void OnRebuildFinish() { this.rebuilding = false; } }
Como você pode ver agora no método
UpdateChanges ,
há uma condição de que, enquanto a construção da malha antiga não está começando a começar a construir uma nova, e também no método
Reconstruir , a primeira ação verifica se o processo de malha já está em andamento.
Resolução de problemas
Agora um pouco sobre o processo de construção de um mapa.
Como usaremos o sistema de tarefas e construiremos a grade em paralelo para construir o mapa, usei o tipo da tarefa
IJobParallelFor , que será executada um certo número de vezes. Para não carregar o processo de construção com nenhuma tarefa separada, usaremos o conjunto de tarefas agrupadas em um
JobHandle .
Na maioria das vezes, para construir uma grade, use dois ciclos aninhados um ao outro para criar, por exemplo, horizontal e verticalmente. Neste exemplo, também construiremos a grade horizontalmente e depois verticalmente. Para fazer isso, calculamos o número de pontos horizontais e verticais no método
Rebuild , depois no método
Rebuild percorremos o ciclo ao longo dos pontos verticais e vamos construir pontos horizontais em paralelo na tarefa. Para imaginar melhor o processo de criação, dê uma olhada na animação abaixo.
O número de pontos verticais indicará o número de tarefas, por sua vez, cada tarefa criará pontos apenas horizontalmente, após a conclusão de todas as tarefas, os pontos serão somados em uma lista. É por isso que preciso usar uma tarefa como
IJobParallelFor para passar o índice do ponto na grade horizontalmente para o método
Execute .
E, como temos a estrutura de pontos, agora você pode criar a estrutura da tarefa
Job e herdá-la da interface
IJobParallelFor , tudo é simples aqui.
Job public struct Job : IJobParallelFor { public void Execute(int index) {} }
Retornamos ao método
Rebuild da classe
Map , onde faremos os cálculos necessários para a medição da grade.
Mapa public sealed class Map : Obstacle { public void Rebuild() { if (this.rebuilding) return; print(“ !”); Vector2 mapSize = this.size - this.offset * 2f; int horizontals = Mathf.RoundToInt(mapSize.x / this.nodeSize); int verticals = Mathf.RoundToInt(mapSize.y / this.nodeSize); if (horizontals <= 0) { OnRebuildFinish(); return; } Vector2 center = this.position; Vector2 origin = center - (mapSize / 2f); OnRebuildStart(); } }
No método
Rebuild , calculamos o tamanho exato do mapa
mapSize , levando em consideração o recuo e, nas
verticais , escrevemos o número de pontos verticalmente, e nas
horizontais o número de pontos horizontalmente. Se o número de pontos verticais for 0, paramos de construir o mapa e chamamos o método
OnRebuildFinish para concluir o processo. A variável de
origem indicará o local de onde começaremos a construir a grade - no exemplo, este é o ponto inferior esquerdo no mapa.
Agora você pode ir para as tarefas e preenchê-las com dados.
Durante a construção da grade, a tarefa precisará de uma matriz
NativeArray onde colocaremos os pontos, também porque temos obstáculos no mapa, também precisaremos passá-los para a tarefa, para isso usaremos outra matriz
NativeArray e , em seguida, precisaremos do tamanho dos pontos no problema , a posição inicial de onde iremos construir os pontos, bem como as coordenadas iniciais da série.
Job public struct Job : IJobParallelFor { [WriteOnly] public NativeArray<Node> array; [ReadOnly] public NativeArray<Rect> bounds; public float nodeSize; public Vector2 startPos; public Vector2Int startCoords; public void Execute(int index) {} }
Marquei a matriz de pontos com o atributo
WriteOnly, pois na tarefa será necessário "
gravar " os pontos recebidos na matriz, pelo contrário, a matriz de
limites de obstáculos
é marcada com o atributo
ReadOnly, pois na tarefa apenas "
leremos " dados dessa matriz.
Bem, por enquanto, vamos prosseguir com o cálculo dos pontos depois.
Agora, de volta à classe
Map , onde denotamos todas as variáveis envolvidas nas tarefas.
Aqui, primeiro, precisamos de um
identificador global
de tarefas, uma série de obstáculos na forma de
NativeArray , uma lista de tarefas que conterá todos os pontos recebidos na grade e
Dicionário com todas as coordenadas e pontos no mapa, para que seja mais conveniente procurá-las mais tarde.
Mapa public sealed class Map : Obstacle { private JobHandle handle; private NativeArray<Rect> bounds; private HashSet<NativeArray<Node>> jobs = new HashSet<NativeArray<Node>>(); private Dictionary<Vector2Int, Node> nodes = new Dictionary<Vector2Int, Node>(); }
Agora, novamente, retornamos ao método
Rebuild e continuamos a construir a grade.
Primeiro, inicialize o conjunto de obstáculos dos
limites para passá-lo à tarefa.
Reconstruir public void Rebuild() { Vector2 center = this.position; Vector2 origin = center - (mapSize / 2f); int count = this.obstacles.Count; if (count > 0) { this.bounds = new NativeArray<Rect>(count, Allocator.TempJob, NativeArrayOptions.UninitializedMemory); } OnRebuildStart(); }
Aqui, criamos uma instância do
NativeArray por meio de um novo construtor com três parâmetros. Examinei os dois primeiros parâmetros em um artigo anterior, mas o terceiro parâmetro nos ajudará a economizar um pouco de tempo criando uma matriz. O fato é que gravaremos dados na matriz imediatamente após sua criação, o que significa que não precisamos garantir que eles sejam limpos. Este parâmetro é útil para
NativeArray, que será usado apenas no modo de
leitura na tarefa.
E assim, então preenchemos a matriz de
limites com dados.
Reconstruir public void Rebuild() { Vector2 center = this.position; Vector2 origin = center - (mapSize / 2f); int count = this.obstacles.Count; if (count > 0) { this.bounds = new NativeArray<Rect>(count, Allocator.TempJob, NativeArrayOptions.UninitializedMemory); for(int i = 0; i < count; i++) { Obstacle obs = this.obstacles[i]; Vector2 position = obs.position; Rect rect = new Rect(Vector2.zero, obs.size); rect.center = position; this.bounds[i] = rect; } } OnRebuildStart(); }
Agora podemos começar a criar tarefas, para isso, percorreremos um ciclo por todas as linhas verticais da grade.
Reconstruir public void Rebuild() { Vector2 center = this.position; Vector2 origin = center - (mapSize / 2f); int count = this.obstacles.Count; if (count > 0) { this.bounds = new NativeArray<Rect>(count, Allocator.TempJob, NativeArrayOptions.UninitializedMemory); for(int i = 0; i < count; i++) { Obstacle obs = this.obstacles[i]; Vector2 position = obs.position; Rect rect = new Rect(Vector2.zero, obs.size); rect.center = position; this.bounds[i] = rect; } } for (int i = 0; i < verticals; i++) { float xPos = origin.x; float yPos = origin.y + (i * this.nodeSize) + this.nodeSize / 2f; } OnRebuildStart(); }
Para começar, em
xPos e
yPos , obtemos a posição horizontal inicial da série.
Reconstruir public void Rebuild() { Vector2 center = this.position; Vector2 origin = center - (mapSize / 2f); int count = this.obstacles.Count; if (count > 0) { this.bounds = new NativeArray<Rect>(count, Allocator.TempJob, NativeArrayOptions.UninitializedMemory); for(int i = 0; i < count; i++) { Obstacle obs = this.obstacles[i]; Vector2 position = obs.position; Rect rect = new Rect(Vector2.zero, obs.size); rect.center = position; this.bounds[i] = rect; } } for (int i = 0; i < verticals; i++) { float xPos = origin.x; float yPos = origin.y + (i * this.nodeSize) + this.nodeSize / 2f; NativeArray<Node> array = new NativeArray<Node>(horizontals, Allocator.Persistent); Job job = new Job(); job.startCoords = new Vector2Int(i * horizontals, i); job.startPos = new Vector2(xPos, yPos); job.nodeSize = this.nodeSize; job.bounds = this.bounds; job.array = array; } OnRebuildStart(); }
Em seguida, criamos um
NativeArray simples onde os pontos da tarefa serão colocados, aqui para a
matriz, você precisa especificar quantos pontos serão criados horizontalmente e o tipo de alocação
Persistente , porque a tarefa pode demorar mais de um quadro.
Depois disso, crie a própria instância da tarefa
Job , coloque as coordenadas iniciais da série
startCoords , a posição inicial da série
startPos , o tamanho dos pontos
nodeSize , a matriz de obstáculos de
limites e a própria matriz de pontos no final.
Resta apenas colocar a tarefa em
controle e a lista de tarefas global.
Reconstruir public void Rebuild() { Vector2 center = this.position; Vector2 origin = center - (mapSize / 2f); int count = this.obstacles.Count; if (count > 0) { this.bounds = new NativeArray<Rect>(count, Allocator.TempJob, NativeArrayOptions.UninitializedMemory); for(int i = 0; i < count; i++) { Obstacle obs = this.obstacles[i]; Vector2 position = obs.position; Rect rect = new Rect(Vector2.zero, obs.size); rect.center = position; this.bounds[i] = rect; } } for (int i = 0; i < verticals; i++) { float xPos = origin.x; float yPos = origin.y + (i * this.nodeSize) + this.nodeSize / 2f; NativeArray<Node> array = new NativeArray<Node>(horizontals, Allocator.Persistent); Job job = new Job(); job.startCoords = new Vector2Int(i * horizontals, i); job.startPos = new Vector2(xPos, yPos); job.nodeSize = this.nodeSize; job.bounds = this.bounds; job.array = array; this.handle = job.Schedule(horizontals, 3, this.handle); this.jobs.Add(array); } OnRebuildStart(); }
Feito. Temos uma lista de tarefas e seu
identificador comum, agora podemos executá-lo chamando seu método
Complete no método
OnRebuildStart .
Onrebuildstart private void OnRebuildStart() { this.rebuilding = true; this.handle.Complete(); }
Como a variável de
reconstrução indicará que o processo de
malha está em andamento, o
próprio método
UpdateChanges também deve especificar a condição em que esse processo terminará usando o
identificador e sua propriedade
IsCompleted .
Atualizações private void UpdateChanges() { if (this.rebuilding) { print(“ ...”); if (this.handle.IsCompleted) OnRebuildFinish(); } else { if (this.requireRebuild) { print(“ , !”); Rebuild(); } else { this.requireRebuild = CheckChanges(); } } }
Depois de concluir as tarefas, o método
OnRebuildFinish será chamado onde já coletamos os pontos recebidos em uma lista geral do
Dicionário e, o mais importante, para limpar os recursos ocupados.
OnRebuildFinish private void OnRebuildFinish() { this.nodes.Clear(); foreach (NativeArray<Node> array in this.jobs) { foreach (Node node in array) this.nodes.Add(node.coords, node); array.Dispose(); } this.jobs.Clear(); if (this.bounds.IsCreated) this.bounds.Dispose(); this.requireRebuild = this.rebuilding = false; }
Primeiro, limpamos o dicionário de nós dos pontos anteriores, depois usamos o loop foreach para classificar todos os pontos que recebemos das tarefas e os colocamos no dicionário de nós , onde a chave são as coordenadas ( NÃO a posição !) Do ponto e o valor é o próprio ponto. Com a ajuda deste dicionário, será mais fácil procurar pontos vizinhos no mapa. Após o preenchimento, limpamos a matriz do array usando o método Dispose e, no final, limpamos a própria lista de tarefas dos trabalhos .Você também precisará limpar os limites dos obstáculos se ele tiver sido criado anteriormente.Depois de todas essas ações, obtemos uma lista de todos os pontos no mapa e agora você pode desenhá-los no palco.Para fazer isso, na classe Map , crie o método OnDrawGizmos onde desenharemos os pontos.Mapa public sealed class Map : Obstacle { #if UNITY_EDITOR private void OnDrawGizmos() {} #endif }
Agora, através do loop, desenhamos cada ponto.Mapa public sealed class Map : Obstacle { #if UNITY_EDITOR private void OnDrawGizmos() { foreach (Node node in this.nodes.Values) { Gizmos.DrawWireSphere(node.position, this.nodeSize / 10f); } } #endif }
Depois de todas essas ações, nosso mapa parece um pouco chato, para realmente obter uma grade, você precisa que os pontos sejam conectados um ao outro.Para procurar pontos vizinhos, basta encontrar o ponto desejado por suas coordenadas em 8 direções; portanto, na classe Map , criaremos uma matriz estática simples de direções de Direções e o método de pesquisa de células por suas coordenadas GetNode .Mapa public sealed class Map : Obstacle { public static readonly Vector2Int[] Directions = { Vector2Int.up, new Vector2Int(1, 1), Vector2Int.right, new Vector2Int(1, -1), Vector2Int.down, new Vector2Int(-1, -1), Vector2Int.left, new Vector2Int(-1, 1), }; public Node GetNode(Vector2Int coords) { Node result = default(Node); try { result = this.nodes[coords]; } catch {} return result; } #if UNITY_EDITOR private void OnDrawGizmos() {} #endif }
O método GetNode retornará um ponto por coordenadas da lista de nós , mas você precisa fazer isso com cuidado, porque se as coordenadas Vector2Int estiverem incorretas, ocorrerá um erro; portanto, aqui usamos o bloco try catch exception , que ajudará a ignorar a exceção e não " travará " o aplicativo inteiro com um erro.Em seguida, percorreremos um ciclo em todas as direções e tentaremos encontrar pontos vizinhos no método OnDrawGizmos e, o mais importante, não se esqueça de considerar a permeabilidade do ponto.Ondrawgizmos #if UNITY_EDITOR private void OnDrawGizmos() { Color c = Gizmos.color; foreach (Node node in this.nodes.Values) { Color newColor = Color.white; if (node.isWalkable) newColor = new Color32(153, 255, 51, 255); else newColor = Color.red; Gizmos.color = newColor; Gizmos.DrawWireSphere(node.position, this.nodeSize / 10f); newColor = Color.green; Gizmos.color = newColor; if (node.isWalkable) { for (int i = 0; i < Directions.Length; i++) { Vector2Int coords = node.coords + Directions[i]; Node connection = GetNode(coords); if (connection) { if (connection.isWalkable) Gizmos.DrawLine(node.position, connection.position); } } } } Gizmos.color = c; } #endif
Agora você pode iniciar o jogo com segurança e ver o que aconteceu.Neste exemplo, construímos apenas o próprio gráfico usando tarefas, mas foi o que aconteceu depois que eu parafusei no sistema o próprio algoritmo A * , que também usa o sistema Job para encontrar o caminho, a fonte no final do artigo .Pesquisa de mapa e caminho Assim, você pode usar o novo sistema de tarefas para seus objetivos e criar sistemas interessantes sem muito esforço.Como no artigo anterior, o sistema de tarefas é usado sem o ECS , mas se você usar esse sistema em conjunto com o ECS , poderá obter resultados simplesmente surpreendentes nos ganhos de desempenho. Boa sorte !Origem do Projeto Path Finder