Introdução
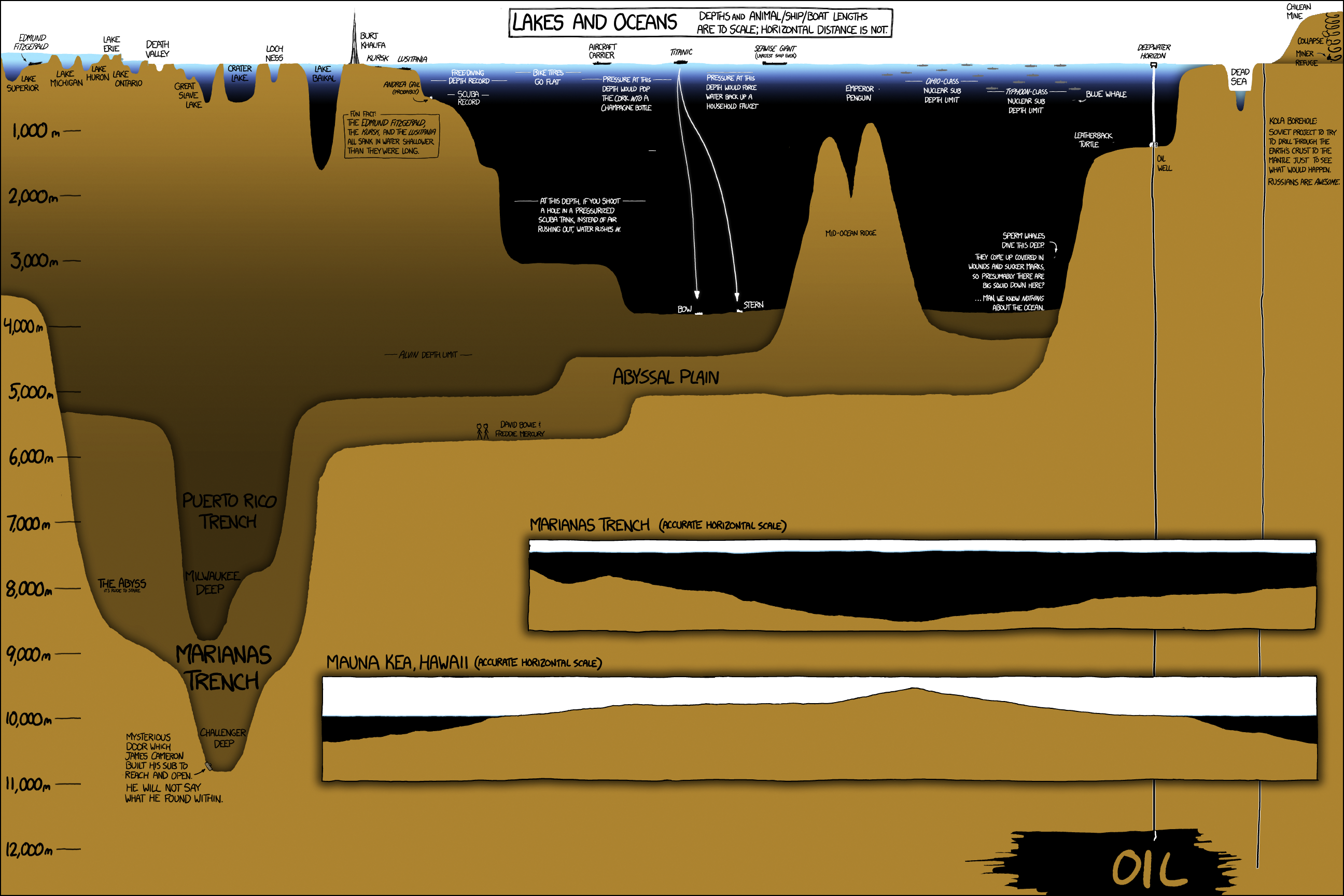
A superfície do planeta é de aproximadamente 71% coberta pelos oceanos (cerca de 361 milhões de km²). A área da Federação Russa é de aproximadamente 17 milhões de km. A profundidade dos oceanos é irregular, distinguindo as seguintes zonas:
Prateleira (prateleira - prateleira) - profundidade de 200 a 500 m;
Inclinação continental - profundidade de até 3500 m;
Leito oceânico - profundidade de até 6000 m;
Calhas em águas profundas - profundidade abaixo de 6000 m.
A profundidade média também difere:
Atlântico - 3600 m
Indiano - 3890 m
Ártico - 1225 m
Calmo - 4250 m
Por que um homem rasteja debaixo d'água?
Historicamente, primeiro os alimentos (peixes, mariscos, artrópodes, algas). Em seguida, para trabalhos de engenharia (construção de estruturas hidráulicas, operações militares). Recentemente, para a construção de instalações lineares (tubulações (gás, petróleo) e cabos submarinos) e mineração (gás, petróleo, nódulos de ferro-manganês). Para os seres humanos, o oceano é perigoso, mas útil como fonte de bem.
Como o homem conquistou as profundezas
Holding Diving
Se mergulhadores de pérolas e outras ostras estavam sempre, então o mergulho em profundidades consideráveis era possível nos tempos modernos. Para ser justo, é necessário observar as profundidades recordes de mergulho dos mergulhadores livres [1]:
Mergulho com peso constante com retenção da respiração:
Homens - 129 m (Alexey Molchanov, 28/10/2016)
Mulher - 104 m (Alessia Zecchini, 10/05/2017)
UPD:
Homens - 130 m (Alexey Molchanov, 18/07/2018)
Mulheres - 107 m (Alessia Zecchini, 26/07/2018)
No site da AIDA .
Sem limites:
Homens -
253,2 m (Herbert Nietzsc, 06/06/2012)
UPD:
AIDA não contou a tentativa.
Homens -
214 m (Herbert Nietzsc, 14-06-2007)
No site da AIDA .
Mulheres -
160 m (Tanya Streeter, 17/08/2002)
Também é necessário entender que, para alcançar esses resultados, as pessoas dedicam a vida inteira ao treinamento, enquanto muitas morrem na tentativa de quebrar o recorde.
Usando as conquistas da ciência e da tecnologia para trabalhar em profundidade

Máquina de mergulho de Lesbridge
Em 1715, o inglês John Lesbridge construiu um veículo subaquático, que já era o protótipo de um traje rígido moderno. Um homem foi colocado em um cilindro de metal com uma tampa. Havia três aberturas no cilindro: duas para as mãos e uma terceira - um orifício de inspeção no qual o vidro foi inserido. De acordo com as descrições, o inventor desceu a uma profundidade de 24 me passou debaixo d'água por até 34 minutos. Usou uma máquina para elevar valores após um naufrágio.
Fato de mergulho pesado
Podemos destacar ainda o ano de 1819, quando o primeiro traje de mergulho pesado foi introduzido por Kristian August Sieb, cujas modificações ainda estão em uso atualmente.
Por exemplo, um casaco de três parafusos: este equipamento de mergulho padrão foi usado na marinha russa e na frota civil do século XIX até hoje. Eles estão equipados com estações de mergulho de barcos de mergulho marítimo e raid, embarcações de resgate e rebocadores. Não isola o mergulhador da pressão ambiental (água). Equipado com interfone.
O registro de mergulho no macacão pesado encontrado foi de
317 metros [2]. Como parte do desenvolvimento de elementos da tarefa do curso K-2 (a operação de um único navio no mar para a finalidade pretendida), os especialistas em mergulho da embarcação de resgate Igor Belousov da Frota do Pacífico da Marinha Russa na faixa de treinamento em águas profundas fizeram primeiro uma descida experimental em um sino de mergulho a uma profundidade de 317 metros com acesso ao solo.
Com base nos resultados de descidas experimentais até profundidades de até 305 m, o ACC da Marinha e o comando da Marinha chegaram à conclusão de que, para garantir a segurança dos mergulhadores, a profundidade da descida deve ser limitada a 200 m para descidas usando mergulhos de curto prazo, uma vez que mergulhadores em grandes profundidades permanecem fisicamente impraticáveis e que o resgate independente de mergulhadores de um submarino afundado pelo método de escalar o buoyrp de profundidades superiores a 200 m é impossível [3].
Novamente, essas profundidades estão disponíveis após treinamento extensivo e uso de câmaras de pressão para descompressão.
Aparelho Henry Fluss
A seguir, você pode destacar o aparelho Henry Fluss da patente de 1878, que pode ser chamado de MERGULHADOR.
Equipamento de mergulho
Em 1945, Jacques-Yves Cousteau, juntamente com o equipamento de mergulho patenteado Emil Gagnan. O equipamento de mergulho agora é usado pela maioria dos entusiastas do mergulho, mergulhadores profissionais e salva-vidas.
Equipamento de mergulho: 1 - Mangueira, 2 - Bocal; 3 - Válvula (caixa de câmbio); 4 - alça de ombro; 5 - escudo traseiro; 6 - Tanque (garrafa de gás)
O registro de mergulho atualmente pertence a Ahmed Gabr. Ele conseguiu alcançar
332,4 metros abaixo da superfície da água do Mar Vermelho, perto da cidade de Dahab. Todo o mergulho levou 14 horas (a subida provavelmente durou pelo menos 10 horas).
E, novamente, esses registros exigem preparação prolongada, uma câmara de pressão e uma grande equipe de suporte.
Qual é a profundidade máxima em que uma pessoa pode mergulhar, experimentando o efeito da pressão de uma coluna de água nessa profundidade?COMEX
534 m em águas abertas 1988, Marselha, França [4], usando uma mistura respiratória COMEX Hydra 8 (49% hidrogênio, 50% hélio, 1% oxigênio) para um total de 6 pessoas (4 mergulhadores COMEX, 2 da Marinha Francesa). Nos primeiros 8 dias na câmara de pressão, um aumento gradual da pressão para 53 atmosferas. Além disso, todos os 6 mergulhadores trabalharam em profundidades de 520 a 534 m. Depois que um exercício foi realizado para conectar os tubos. Após cumprir as tarefas planejadas, os mergulhadores foram submetidos à descompressão em uma câmara de pressão por 18 dias.
701 m na câmara de pressão experimental 1992, Marselha, França [5]. Registro da experiência:
- 4 semanas de período preparatório antes do "mergulho"
- Isolamento de dois dias a 10 m de profundidade
- 13 dias para atingir uma pressão correspondente a uma profundidade de 675 m usando uma mistura respiratória COMEX Hydra 8 (49% de hidrogênio, 50% de hélio, 1% de oxigênio).
- 3 dias de pressão entre 650 me 675 m
- Então, um dos mergulhadores, Theo Mavrostomos, entrou em uma câmara de pressão separada e continuou a mergulhar a uma profundidade de 701 m usando a mistura respiratória COMEX Hydro 10, onde permaneceu por 7 horas.
- Depois, 24 dias de descompressão.
- E 2,5 meses de observação dos participantes do experimento.
Aparentemente, a pressão a uma profundidade de mais de 700 metros, usando uma mistura de gases para respirar, é extrema.
Existem estudos sobre a tecnologia de respiração líquida. Para isso, o perfluorocarboneto líquido com oxigênio e dióxido de carbono dissolvido nele é usado nos experimentos. Até a data de publicação, os experimentos estavam sendo realizados em animais de laboratório.
Aqui vale a pena recordar as profundidades médias dos oceanos de 1250 a 4250 m.
Fatos rígidos de mergulho
O próximo ramo para conquistar as profundezas é a criação de trajes que mantêm a pressão atmosférica normal para uma pessoa e protegem contra a pressão ambiental.
De acordo com GOST R 52119-2003: Uma roupa de mergulho rígida foi projetada para operações subaquáticas de observação e mergulho por um operador sob pressão interna normal (técnica de mergulho. Termos e definições).
Equipamento destinado a operações em alto mar (até 600 metros), durante o qual a pressão atmosférica normal atua no mergulhador, o que elimina o problema de descompressão e elimina nitrogênio, oxigênio e outros envenenamentos. Historicamente, os seguintes produtos podem ser distinguidos:
Irmão de traje de mergulho Karmagnol
Fato de mergulho com 20 pequenas vigias de Alphonse e Theodore Carmagnol, Marselha, França, 1878. O traje espacial deveria ser capaz de mergulhar com segurança uma pessoa a uma profundidade de 60 m, no entanto, ele nunca trabalhou como deveria e constantemente vazava. Agora localizado no Museu da Marinha Francesa.
Trajes "Neufeld e Kunke"
Três gerações de roupas de mergulho pela empresa alemã Neufeld e Kunke, 1917-1940.
O traje de terceira geração (fabricado entre 1929 e 1940) permitiu mergulhar até 160 metros de profundidade e foi equipado com um telefone embutido. O desenvolvimento da empresa "Neufeld e Kunke" formou a base de um traje espacial rígido do italiano Roberto Galeazzi no início dos anos 30 do século passado, incluindo a adoção da frota militar do recém-formado estado soviético.
Submarino
1933, Mini submarino para uma pessoa. O traje permite que o mergulhador trabalhe por um tempo considerável a uma profundidade de 300 metros sem um longo processo de descompressão.
Jum suit
JIM suit 1974, Hard suit. O traje espacial foi usado na década de 70 do século passado na indústria de petróleo. Em 1979, uma mergulhadora, Sylvia Earle, estabeleceu um recorde mundial neste traje espacial. Ela desceu 381 metros e caminhou ao longo do fundo do mar por duas horas e meia.
Newtsuit
1985, desenvolvimento liderado por Phil Newten. Testado a uma profundidade de 900 m, certificado a uma profundidade de 300 m.
Exosuit
Exosuit é um traje de 240 metros de dois metros feito de liga de alumínio, que permite que uma pessoa trabalhe a uma profundidade de até 305 metros. Para aumentar a mobilidade e ajudar as pernas e braços humanos fracos, o Exosuit está equipado com 4 motores de propulsão de 1,6 hp. (com a possibilidade de aumentar para 8), além de 18 articulações que proporcionam mobilidade das mãos. As "mangas" do traje espacial podem ser equipadas com vários bicos intercambiáveis: garra, cortador, broca, etc.
Uma característica do Exosuit é seu suporte de vida totalmente autônomo, enquanto oxigênio e eletricidade são fornecidos da maioria dos navios para a maioria dos trajes espaciais subaquáticos semelhantes. O Exosuit possui um sistema de recuperação de oxigênio que limpa o ar do dióxido de carbono e o reabastece com oxigênio. O sistema tem autonomia de 50 horas. No Exosuit, uma pessoa respira ar atmosférico normal sob pressão normal, o que elimina riscos desnecessários e um longo procedimento de descompressão. Exosuit vale US $ 1,3 milhão.
Sistema de Mergulho Atmosférico (ADS 2000)
O ADS 2000 foi desenvolvido em conjunto com a OceanWorks International e a Marinha dos EUA em 1997 para atender aos requisitos da Marinha dos EUA. Carcaça em liga de alumínio forjado T6061, design giratório avançado. Capaz de trabalhar a 610 m de profundidade por 6 horas, possui um sistema de suporte à vida automático e autônomo. Um sistema de direção dupla integrado permite que o piloto navegue facilmente debaixo d'água. Foi certificado pela Marinha dos Estados Unidos em 1º de agosto de 2006, quando o mergulhador chefe da Marinha Daniel Jackson mergulhou a uma profundidade de 610 m.
Mesmo com o uso de trajes espaciais, uma pessoa pode mergulhar a uma profundidade de 610 m.
Mas e os submarinos?
Os submarinos modernos permitem mergulhar a uma profundidade de cerca de 600-650 m.
 Clicável
ClicávelO submarino nuclear soviético Komsomolets permanece o recordista absoluto de mergulho máximo, em 1985 o submarino atingiu uma profundidade de 1027 metros abaixo da superfície do mar. O valor de trabalho para ele era de 1000 m, e o valor estimado era de 1250 m. O destino dos submarinos subseqüentemente se desenvolveu tragicamente. Komsomolets afundou em 1989 devido a um incêndio grave que começou a uma profundidade de cerca de 300 metros. E embora ele, ao contrário do mesmo Thresher, tenha conseguido aparecer, a história ainda acabou sendo muito trágica.
Os batiscaphes foram desenvolvidos para mergulhar as pessoas em profundidades acima de 600 metros.
Batiscafo
FNRS-2 e FNRS-3
O FNRS-2 foi o primeiro batiscafo criado por Auguste Piccard, na Suíça. O trabalho de criação de um batiscafo começou em 1937 e foi interrompido pela Segunda Guerra Mundial. Batiscafo foi concluído em 1948. Nomeado após a Fundação Belga de Pesquisa Nacional (Fonds National de la Recherche Scientifique).
A construção real do FNRS-2 foi realizada nos anos 1946-1948. O batiscafo foi danificado durante os testes no mar em 1948, perto das ilhas de Cabo Verde.
Para testes em alto mar, o batiscafo FNRS-2 partiu no navio belga Scaldis, de 3.500 toneladas. No entanto, o Scaldis não era poderoso o suficiente para retirar o FNRS-2 da água com tanques de bóia cheios de gás. Um mergulho de teste não tripulado a 1.400 m foi concluído com êxito, mas devido a problemas técnicos, não foi possível esvaziar os tanques de flutuação da gasolina. Foi decidido rebocar o FNRS-2 de volta ao porto, mas o batiscafo foi atingido pelas ondas nas laterais da embarcação e ocorreu um vazamento de gás dos tanques de flutuação. Depois de detectar um vazamento, a gasolina foi drenada para o mar e o FNRS-2 foi levantado a bordo do navio. Testes adicionais foram reduzidos devido à falta de fundos para reparo.
Após a cessação do financiamento em 1948, o FNRS-2 foi vendido para a Marinha Francesa. Os especialistas franceses repararam o FNRS-2 e renomearam o FNRS-3. Em fevereiro de 1954, o FNRS-3 atingiu uma profundidade de 4050 metros no Atlântico, a 160 milhas de Dakar, o recorde anterior de Picard era de 3.150 metros em 1953.
Trieste
Projetado na Suíça, construído na Itália, um batiscafo de pesquisa habitado em alto mar. Desenhado por Auguste Piccard. Trieste foi lançado no mar Mediterrâneo em 26 de agosto de 1953, perto da ilha de Capri. O projeto foi baseado em experiências anteriores com o batiscafo FNRS-2. Trieste era governado pela frota francesa. Após vários anos de operação no Mediterrâneo, Trieste foi comprado em 1958 pela Marinha dos Estados Unidos por US $ 250.000. Inicialmente, a área da tripulação foi projetada para imersão de até 4000 m, mas a Marinha dos EUA ordenou que Krupp fabricasse uma esfera capaz de resistir à imersão em 11.000 m.
Durante a implementação do projeto Necton, em 23 de janeiro de 1960, Jacques Picard e o tenente da Marinha dos EUA Don Walsh mergulharam a uma profundidade de 10.919 m. Assim, pela primeira vez eles conseguiram conquistar o Challenger Abyss na Fossa das Marianas.
Archimède
O desenvolvimento do batiscafo com o nome provisório de B11000 (batiscafo a 11.000 metros) começou em 1957 no arsenal de Toulon. O financiamento foi fornecido pelo Centro Nacional Francês de Pesquisa Científica (CNRS) e pela Fundação Nacional Belga de Pesquisa (FNRS). O projeto foi liderado por Pierre Wilm, o capitão do FNRS-3, Georges Wo, participou significativamente do projeto. "Arquimedes" pretendia afundar no fundo da Fossa das Marianas, mas o batiscafo "Trieste" estava à frente de "Arquimedes"
Shinkai
Shinkai é um veículo subaquático habitado, com profundidade de imersão de até 600 M. Lançado em 1970, até 1981, possuía a maior profundidade de imersão entre os navios japoneses. Propriedade e administração da Guarda Costeira do Japão.
Shinkai 2000 - 1981 ano de construção. Profundidade final 2000 m.
Shinkai 6500 - 1990 ano de construção. A profundidade máxima é 6500m.
Pesquisa 6
O submarino autopropulsado de águas profundas do tipo batiscafo AS-7 "Pesquisa-6" do projeto 1906 foi projetado pelo Rubin LMBP e pelo Malachite SPMBM e construído na Nova-Admiralty Plant em Leningrado em 1975-1979. Testes do dispositivo foram realizados no Mar Negro e no Oceano Pacífico, enquanto a profundidade de imersão de 6.000 metros foi excedida. Os testes do aparelho revelaram suas falhas significativas de projeto e foram acompanhados por repetidas falhas no equipamento. Como resultado, em setembro de 1987, o comitê de seleção do estado, levando em consideração o envelhecimento físico e moral do aparelho AS-7, não o aceitou como parte da Marinha da URSS e reconheceu outros trabalhos como inapropriados.
Mir-1 e Mir-2
Talvez o batiscafo subaquático mais famoso.

Mir-1 e Mir-2 são dois veículos soviéticos e russos de pesquisa em águas profundas para pesquisa oceanológica e operações de resgate. As principais idéias sobre o design do aparelho, a organização de seus sistemas, componentes, elementos e a aquisição de equipamentos científicos e de navegação pertencem a I. E. Mikhaltsev, seu vice A. M. Sagalevich e o engenheiro chefe de projeto da empresa de construção naval finlandesa Sauli Ruohonen, que liderou o grupo de engenheiros finlandeses e técnicos que participaram da construção do aparelho. Os veículos de alto mar foram fabricados em 1987 pela empresa finlandesa Rauma-Repola Oceanics, e o contrato para a criação dos dispositivos foi assinado em 16 de maio de 1985, e o certificado de aceitação foi assinado em 17 de dezembro de 1987, após mergulhos bem-sucedidos no Golfo de Bothnia e no Oceano Atlântico até a profundidade máxima 6170 metros (Mir-1) e a uma profundidade de 6120 metros (Mir-2). De grande importância para a pesquisa científica é a profundidade de trabalho dos "Mundos" - 6.000 metros, para que esses dispositivos possam atingir profundidades nas quais estão localizados 98,5% do fundo dos oceanos. O custo de construção de cada dispositivo em 1987 chegou a 100 milhões de marcos finlandeses (17 milhões de euros).
Jiaolong
Jiaolong é um veículo habitado em águas profundas da China, sem flutuação. Durante o período de 31 de maio a 18 de julho de 2010, ele fez 17 mergulhos no Mar da China Meridional, o mais profundo dos quais - a uma profundidade de 6759 metros. Este evento fez da China o quinto país, depois dos Estados Unidos, França, Rússia e Japão, que possui tecnologia moderna para mergulhar a uma profundidade de mais de 6500 metros.
Desafiador de alto mar
O Deepsea Challenger (DCV 1) é um batiscafo onde, em 26 de março de 2012, o diretor canadense James Cameron mergulhou no Challenger Abyss (Mariana Trench). O submarino foi construído em Sydney, na Austrália, pela Acheron Project Pty Ltd., uma empresa de pesquisa e desenvolvimento. e contém equipamentos científicos e câmeras 3D de alta resolução. O Deepsea Challenger foi construído secretamente na Austrália, em colaboração com a National Geographic e com o apoio da Rolex. O Instituto Scripps de Oceanografia, o Laboratório de Propulsão a Jato e a Universidade do Havaí auxiliaram na construção do batiscafo e na implementação da missão. O engenheiro de construção era o engenheiro australiano Ron Allum. O custo estimado do dispositivo é de 7 milhões de dólares.
No batiscafo, uma pessoa pode mergulhar em qualquer profundidade do oceano e até mesmo manipular a água e levantar alguma coisa, mas o custo do próprio batiscafo e sua manutenção são bastante altos.
Aproveitando o poder do oceano.
A figura mostra brevemente as principais áreas de trabalho no oceano, sem contar as operações de busca e salvamento:- cultivo e colheita de frutos do mar (peixes, mariscos, artrópodes, algas);
- produção e transporte de hidrocarbonetos (petróleo, gás, hidratos gasosos);
- mineração e transporte de minério a partir de nódulos de ferromanganês;
- enterro de resíduos perigosos;
- construção e reparo de estruturas lineares (cabos de fibra ótica subaquática, cabos elétricos subaquáticos, tubulações);
- procure objetos debaixo d'água e mapeamento.
Construção e reparação de estruturas lineares
A empresa espanhola de eletricidade Red Eléctrica de España implementou um sistema de transmissão de energia de corrente contínua de alta tensão (HVDC) que conecta a ilha de Maiorca a um sistema de energia unificado na Espanha continental.Um sistema de 244 quilômetros de linhas elétricas de corrente contínua de alta tensão conecta a região de Morvedre (perto de Valência) à vila de Santa Ponsa, localizada próxima à capital de Maiorca - Palma de Maiorca. A energia elétrica de 400 MW é transmitida através de um cabo que corre ao longo do fundo do mar; as perdas por transmissão de corrente direta são mínimas: 250 kW.Como pode ser visto na figura, ao trabalhar em profundidade, foram utilizados mecanismos especiais. Para a colocação de cabos, é utilizado um aparelho capjet especial [6], que é controlado por veículos subaquáticos com controle remoto (ROV) desabitados.Em torno do mesmo, há uma colocação de cabos de comunicação:A operação para levantar o caça F14 Tomcat de uma profundidade de 1.140 m perto da costa mexicana. Durante a operação, veículos subaquáticos com controle remoto foram usados.Limpando o fundo das surpresas da guerra durante a construção do córrego do norte:Produção de petróleo offshore:Aproximadamente também, com a ajuda de dispositivos telecontrolados, o campo Shtokman está sendo desenvolvido.Portanto, o dispositivo parece vivo:Então eles controlam:E aqui está o que o operador vê ao mesmo tempo:Os dispositivos telecontrolados (ROV) são produzidos em diferentes classes com diferentes profundidades de imersão. Existem aqueles que podem ser reduzidos para 4000 m, existem aqueles que não podem ter mais de 300 m, seu custo também difere por ordens de magnitude. Se os dispositivos adequados para trabalhar em grandes profundidades custam US $ 1 milhão, os dispositivos que operam em profundidades de até 300 m custam várias dezenas de milhares de dólares em design industrial.Além dos veículos com controle remoto, são utilizados veículos subaquáticos autônomos desabitados (AUV). Eles são usados principalmente para operações de busca. Até julho de 2018, a partir de 2014 no Oceano Índico, o avião desaparecido das companhias aéreas da Malásia foi procurado com a ajuda de tais dispositivos.Veículos subaquáticos autônomos são usados para monitorar o status de estruturas lineares subaquáticas (tubulações, linhas de cabos), mapear a superfície do fundo e realizar pesquisas em uma grande área. A maioria dos dispositivos autônomos é feita na forma de um torpedo, a fim de reduzir a resistência frontal da água e, assim, aumentar a duração do trabalho subaquático com uma única carga de bateria.
Mineração de nódulos de ferromanganês
Nódulos de ferromanganês são constrições minerais autênticas de hidróxidos de ferro e manganês, além de outros elementos no fundo de lagos, mares e oceanos. O mais amplamente distribuído nas regiões pelágicas dos oceanos. Estudado pela primeira vez pela expedição inglesa no navio Challenger, em 1872-76. Informações detalhadas sobre nódulos de ferromanganês (distribuição espacial, fácies de formação, petrografia, mineralogia e geoquímica) foram obtidas como resultado de estudos do fundo dos oceanos realizados por pesquisadores de vários países (Grã-Bretanha, CCCP, EUA, Alemanha, Japão, etc.) durante o Ano Geofísico Internacional (1957-1958) e nos anos seguintes.
As reservas estimadas dos três oceanos são de 200 bilhões de toneladas, o Oceano Atlântico contém 45 bilhões de toneladas, o Pacífico - 112 bilhões de toneladas, o Oceano Índico - 41 bilhões de toneladas - depósitos que ocorrem a uma profundidade relativamente rasa e são variedades típicas de depósitos de manganês. a uma profundidade de até 400 metros na costa da Bahia, Califórnia e Japão. Os nódulos na costa do Japão estão localizados a uma profundidade de 100 a 360 metros na camada superior do fundo do mar ao longo do arquipélago de Auzu, perto de Tóquio.
Nautilus Minerals Ltd. constrói uma embarcação especial para o processamento de minério levantado do fundo do oceano [7].
Os nódulos de ferromanganês do Oceano Mundial, em média, contêm os seguintes componentes de minério (%): Na 1.9409; Mg 1,8234; Al 2,82; Si 8,624; P 0,22244; K 0,6427; Ca 2,47; Ti 0,647; V 0,0558; Cr 0,0035; Mn 16,02; Fe 15,55; Ni 0,480; Co 0,284; Cu 0,259; Zn 0,078; Sr 0,0825; Zr 0,0648; Mo 0,0412; T 0,0129; Pb 0,0900. A presença de Ag, Ir, B, Cd, Yb, W, Bi, Y, Hg e outros elementos cujas concentrações são significativamente maiores que os valores médios da crosta terrestre é característica. De acordo com o conteúdo médio dos principais componentes do minério (Ni, Cu, Co, Mn), os nódulos de ferromanganês nas regiões estudadas são comparáveis aos minérios de depósitos desenvolvidos nos continentes.
Na superfície, o minério fica assim:
Muito em breve eles prometem estabelecer a produção industrial.
Juros
Em geral, veículos ou robôs subaquáticos desde 2015 são considerados a nova vanguarda dos robôs (The Next Big Drone Frontier) [8].
O mercado de UUV deverá atingir US $ 5,20 bilhões até 2022, com um CAGR de 14,07% entre 2017 e 2022. O crescimento do mercado pode ser explicado pelo aumento do número de produção offshore de petróleo e gás no mar e pelo aumento das ameaças à segurança marítima.
Em geral, o interesse pela robótica subaquática é bastante alto nos EUA, China, UE e Cingapura.
A pesquisa de patentes confirma isso.
Geografia dos países que registraram patentes no campo da robótica subaquática:
Distribuição pelo número de pedidos enviados:
Pode-se ver que a China agora entrou em primeiro lugar e, em alguns anos, veremos desenvolvimentos no ferro e mais no crescimento dos indicadores econômicos.
Segmentação de tecnologias utilizadas nesta área:
Lista de fabricantes de robótica subaquática .
Naturalmente, o trabalho está sendo feito com estudantes e crianças em idade escolar. De fato, nos próximos anos, todos esses desenvolvimentos entrarão na indústria e serão necessários especialistas para trabalhar com os veículos subaquáticos que estão sendo criados.
Um indicador da disponibilidade desse trabalho é a presença de competições em robótica subaquática:
- Competição Internacional de ROV do MATE (anualmente desde 2002)
- Competição AUVSI RoboSub (anualmente desde 1997)
- Desafio AUV de Singapura (anualmente desde 2013)
- Student Underwater Autonomous Challenge-Europe (SAUC-E) (anualmente desde 2006)
Competição Internacional de ROV do MATE
A competição mais massiva. Nos Estados Unidos, cerca de 600 instituições de ensino declaram participação nas rodadas de qualificação. Eles são divididos em competições escolares e de alunos em várias classes:
- Explorer - aluno
- Ranger - estudantes do ensino médio;
- Navegador - ensino médio;
- Escoteiro - alunos do ensino fundamental.
As equipes de Vladivostok estão realizando com sucesso:
Equipe russa em competições internacionais de robótica subaquática (2009)Equipe DVFU ROV 2010A equipe russa se tornou bicampeã mundial em robótica subaquática (2012)2013 anoCentro de Desenvolvimento de Robótica em Crianças em Idade Escolar (2015)Alunos e alunos Centro de Desenvolvimento de Robótica (2018)ROBOSUB
A competição de maior prestígio para estudantes. Patrocinado pela Fundação UAV e pelo Escritório de Pesquisa Naval. Equipes de estudantes de todo o mundo estão participando. Em 2018, os chineses venceram da Harbin Engineering University, segundo lugar na Universidade Nacional de Cingapura. Realizar com sucesso alunos da FEFU e da Universidade Estadual de Moscou. Nevelsky.
Reconhecimento do RoboSub 2012 em batalha e chegando à finalDesafio AUV de Singapura
Concorrência em veículos subaquáticos autônomos. Estudantes de países da Ásia-Pacífico participam. Realizar com sucesso os alunos do FEFU.
Desafio autônomo subaquático de estudantes-Europa
Infelizmente, não conheço os participantes da Rússia.
O que nós temos?Ainda estamos longe de mais de 600 equipes, como nos EUA, mas também há interesse:
- Competição MATE ROV Vladivostok (rodada de qualificação para o grande MATE, desde 2015);
- VRO Waterborne IRS (em Innopolis desde 2016);
- Perfil de água da NTI Olympiad (desde 2017);
- As primeiras competições de toda a Rússia em robótica subaquática Vladivostok 2018 (agosto-setembro 2018);
- A primeira competição de robótica subaquática para alunos das séries 1 a 4 (2018-2019).
MATE ROV Competition Vladivostok
Realizada em Vladivostok, com base na bacia da Universidade Estadual de Moscou. Nevelsky.
Inscrição de dezembro a março .
Descrição
aqui .
Notícias
aqui e
aqui .
Vídeo
aqui .





VRO Water IRS
Eles foram realizados como parte da final da
Olimpíada de Robótica da Rússia, em Innópolis, no final de junho. Para 2019, ainda não se sabe se Innopolis realizará a final do BPO.
O registro abre na primavera .
Perfil de água NTI Olympiad
O registro já começouAs primeiras competições de toda a Rússia em robótica subaquática Vladivostok 2018 (Aquareobototech 2018)
Já se foi. Você pode ler sobre eles
aqui e
aqui .
Veja
aqui .
A primeira competição em robótica subaquática para estudantes das séries 1 a 4
Regras da competição
aqui .
As inscrições terminam no dia 30 de setembro .
Oferta
Podemos oferecer os seguintes conjuntos para robótica subaquática:
- Micro Underwater Robot ( MUR ) - Um conjunto recomendado para NTI e VRO.
- Kit de montagem de robô de telecontrole MUR MiddleROV
- Kit de montagem para robô de telecontrole MUR ElementaryROV
- MUR HighROV - para participação no MATE (sob pedido)
Mais informações no
site do Center for Robotics