A perfuração de placas de circuito impresso é uma verdadeira dor de cabeça para um engenheiro eletrônico, mas nosso novo dispositivo ajudará a suavizá-lo um pouco. Essa adição simples e compacta aos mini- brocas prolongará a vida útil do motor e das brocas. Esquema, quadro, instruções de configuração, vídeo - tudo no artigo!
Para que serve o controle de velocidade?
Normalmente, os minidrills são construídos com base em motores CC convencionais. E a velocidade de tais motores depende da carga e da tensão aplicada. Como resultado, em marcha lenta, o motor gira muito fortemente e, nos tempos de perfuração, a velocidade do motor flutua em uma ampla faixa.
Se você reduzir a tensão no motor quando não houver carga, poderá obter um aumento no recurso dos exercícios e dos próprios motores. Além disso, até a precisão da perfuração é aprimorada. A maneira mais fácil de conseguir isso é medir a corrente consumida pelo motor.
Existem muitos circuitos desses reguladores na Internet, mas a maioria deles usa reguladores de tensão lineares. Eles são enormes e requerem refrigeração. Em colaboração com o
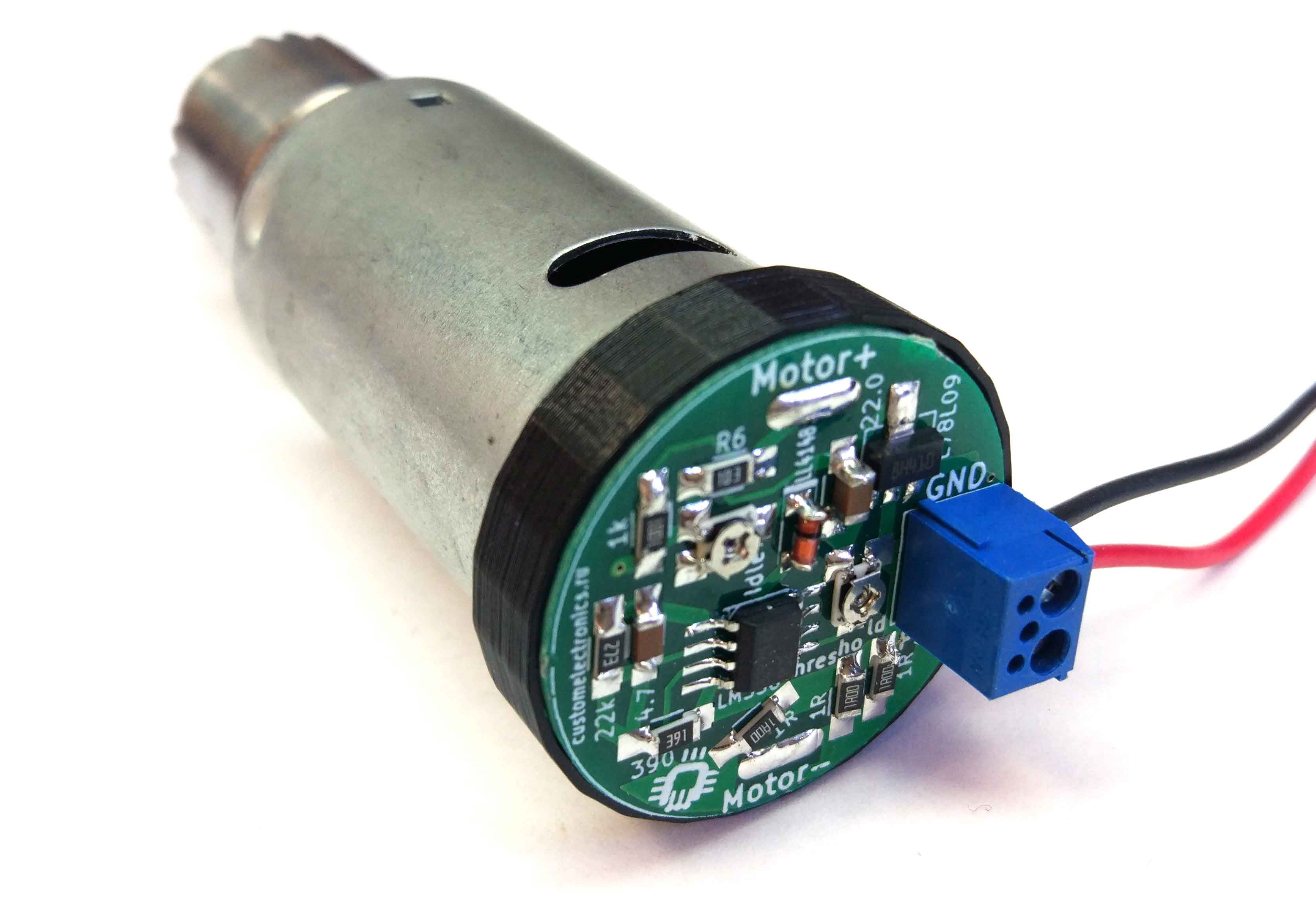
TinyElectronicFriends, queríamos fazer uma placa compacta baseada em um estabilizador de pulso para que pudesse ser "desgastada" no motor.
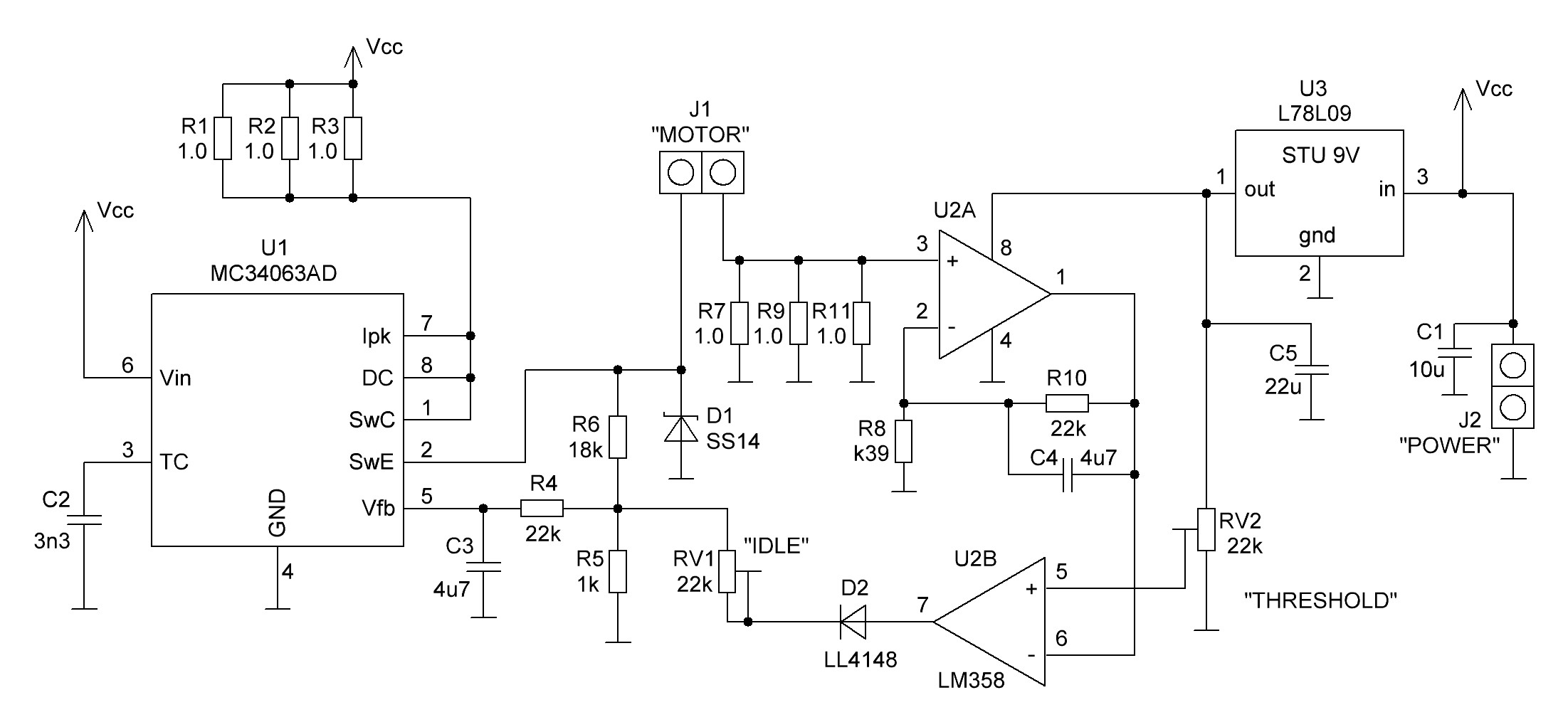
Esquema
Um controlador PWM com uma chave integrada MC34063 regula a tensão no motor. A tensão no shunt R7, R9, R11 é amplificada pelo amplificador operacional e alimentada através do comparador à entrada de feedback do controlador PWM.
Se a corrente for menor que um determinado valor, uma tensão será aplicada ao motor, dependendo da configuração de resistência RV1. Ou seja, em marcha lenta, apenas parte da energia será fornecida ao motor, e o resistor de sintonização RV1 permitirá ajustar a velocidade ao mesmo tempo.
Se o sinal na saída do amplificador operacional exceder a tensão no comparador, a tensão total será aplicada ao motor. Ou seja, ao perfurar, o motor liga na potência máxima. O limiar de comutação é definido pelo resistor RV2.
Um estabilizador linear é usado para alimentar o amplificador operacional.
Todos os componentes do circuito dissipam muito pouco calor e você pode coletá-lo completamente nos componentes SMD. Pode trabalhar com uma ampla gama de tensões de alimentação (dependendo da resistência R6), não requer controladores e sensores de velocidade.
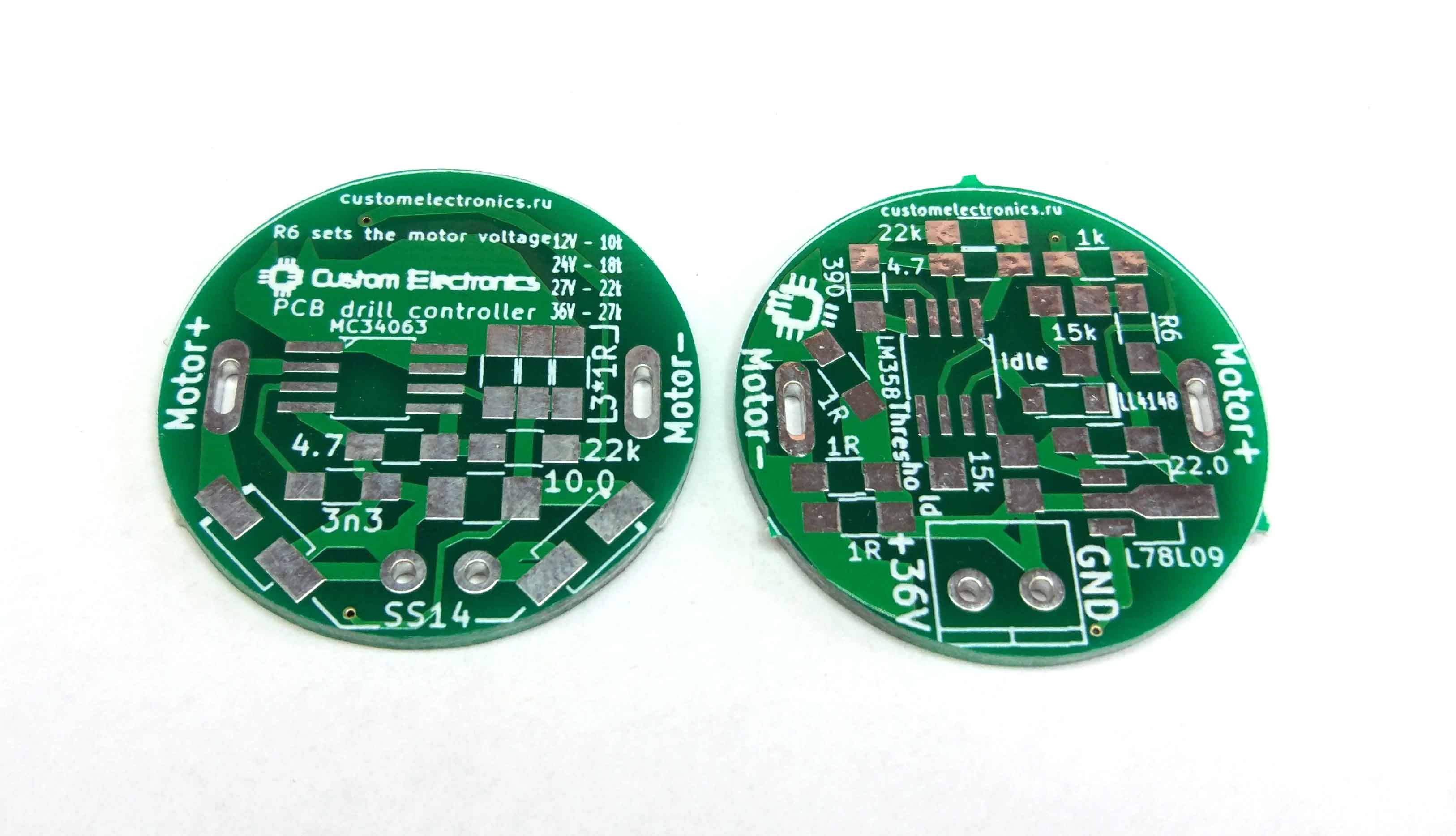
Placa de circuito
Todo o circuito se encaixa em uma placa de circuito impresso de dupla face com um diâmetro de 30 mm. Nele existem apenas alguns pedaços de vias e podem ser facilmente fabricados “em casa”. Abaixo no artigo, haverá arquivos para baixar o arquivo PCB do SprintLaout.
Lista de componentes
Aqui está uma lista completa de tudo que você precisa para construir:
- Placa de circuito impresso (link para os arquivos para fabricação no final do artigo)
- U1 - MC34063AD Estabilizador de comutação, SOIC-8
- U2 - LM358, amplificador operacional, SOIC-8
- U3 - L78L09, estabilizador, SOT-89
- D1, D3 - SS14, diodo Schottky, SMA - 2pcs
- D2 - LL4148, diodo retificador, MiniMELF
- C1 - capacitor, 10uF, 50V, 1210
- C2 - capacitor, 3.3nF, 1206
- C3, C4 - capacitor, 4.7uF, 1206 - 2pcs
- C5 - capacitor, 22uF, 1206
- Resistor R1-R3, R7, R9, R11 - 1 Ohm, 1206 - 6 unid.
- R4, R10 - 22kΩ resistor, 1206 - 2pcs
- R5 - resistor de 1kΩ, 1206
- R6 - resistor 10-27kOhm, 1206. A resistência depende da tensão nominal do motor usado. 12V - 10k Ohm, 24V - 18k Ohm, 27V - 22k Ohm, 36V - 27k Ohm
- R8 - Resistor 390 Ohm, 1206
- RV1, RV2 - resistor interlinear, 15kOhm, tipo 3224W-1-153 - 2pcs
- XS1 - terminal, 2 pinos, passo 3,81 mm
Também fizemos um anel limitador em uma impressora 3D, para instalação conveniente no mecanismo. Link para download do arquivo STL para download no final do artigo.

Montagem e configuração
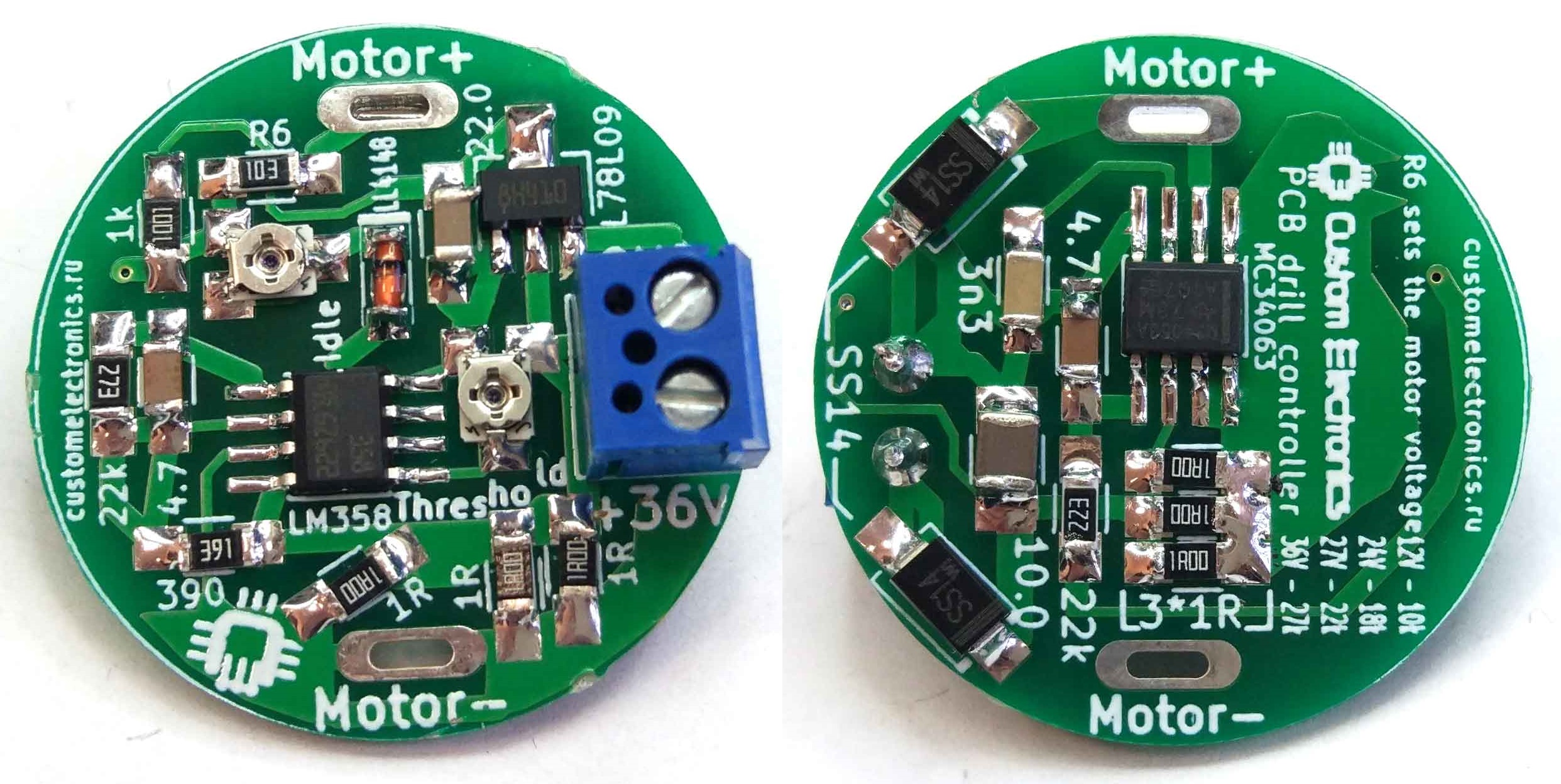
Tudo vai ser bem simples. As almofadas de contato são desenhadas para solda manual.
Vale a pena iniciar a montagem da placa instalando todos os componentes na lateral da placa sem ajustar os resistores e depois na parte traseira. O terminal é mais fácil de instalar por último. A classificação R6 é selecionada de acordo com a tensão nominal do seu motor. Neste dispositivo, é importante controlar a posição da chave nos chips e a polaridade dos diodos. Todos os outros componentes não são polares.
Instale um espaçador entre a placa e o motor para que a placa não toque no motor. A prancha em si é usada diretamente nas lamelas do motor. Verifique a polaridade da conexão do motor várias vezes para que ela gire para o lado direito e depois solde os contatos.
Os contatos para fornecer tensão à entrada da placa são assinados com "GND" e "+ 36V". O sinal de menos da fonte de tensão de entrada é conectado ao pino "GND" e o sinal de mais a "+ 36V". A tensão da fonte de alimentação deve corresponder à tensão nominal do motor.
A configuração do regulador é muito simples:
- Defina o resistor RV2 no limite do regulador para obter o máximo
- Defina o resistor RV1 para a velocidade ideal de marcha lenta do motor
- Defina o resistor RV2 para um limite que, quando a menor carga aparecer, a tensão no motor aumente
Vídeo
É difícil avaliar o efeito do uso no vídeo, mas agora sempre perfuramos apenas com o regulador! Demora apenas um pouco para se acostumar e garantir que as brocas estejam bem afiadas. E, é claro, a qualquer momento, você pode ativá-lo ao máximo para sempre.
Referências
Você pode encontrar links para baixar todos os arquivos necessários na
página principal do projeto .
Obrigado pelo seu interesse!