Olá pessoal! Há pouco tempo, comecei a estudar programação para microcontroladores. No começo, escrever programas simples para piscar um LED ou até dois não era mais divertido e estava ficando chato. E uma noite, pensando em como ocupar sua cabeça, ele decidiu encontrar projetos mais complexos. Na Internet, vi muitas coisas que as pessoas criam, mas acima de tudo, fui surpreendido por um robô de seis pernas ou hexapod.
Inspirado nas fotos e no vídeo, decidi experimentar. O desenvolvimento do caso, a eletrônica e os programas serão realizados a partir de 0.
Etapas do desenvolvimento:Parte 1 - DesignParte 2 - montagemParte 3 - CinemáticaParte 4 - trajetórias e sequências matemáticasParte 5 - EletrônicaParte 6 - transição para impressão 3DParte 7 - nova caixa, software aplicativo e protocolos de comunicaçãoDesenvolvimento de um modelo 3D do corpo
Matérias-primas e componentes para o futuro robô:
0. Arduno Due (escreveremos no Atmel Studio em C puro, sem o Arduino IDE, ao mesmo tempo, mostrarei como conectar um depurador a esta placa) - 1 pc;
1. HLK-RM04 (conversor UART para WIFI) - uma ponte transparente com UART para WIFI - 2pcs;
2. Servos MG996R (da China, como pode sem ele) - 18pcs;
3. LM317D2T-TR para alimentar servos + mussiness fino na forma de resistores e capacitores;
4. CAD "COMPASS 3D";
5. Contraplacado 3mm como material para o estojo (barato e cheira delicioso);
6. Capacidade de solicitar corte a laser;
7. Hora. Muito tempo.
No início da jornada, surgiu a pergunta: “Que tipo de construção eu quero?”. No processo de encontrar uma resposta para essa pergunta, deparei-me com várias soluções prontas. Os mais populares PhantomX e A-Pod. Tendo analisado os casos, decidi iniciar o desenvolvimento, mas não. O seguinte problema apareceu: como eu não via esses robôs nos meus olhos e não os segurava nas mãos, eu tinha uma péssima idéia de suas dimensões. Em busca de uma solução para esse problema, me deparei com um dos artigos sobre o Habr. O autor do artigo
tomnewmann gentilmente compartilhou comigo os desenhos de seu projeto, pelos quais agradeço muito a ele.
Tendo apreciado as dimensões dos detalhes futuros e pensando um pouco sobre todas as informações recebidas, comecei a esboçar os desenhos do caso. Eu pensei que seria mais sensato começar com o design das pernas, pois elas são a parte mais difícil do corpo.
Coxa
Após várias horas de reflexão, o primeiro modelo de Coxa apareceu (é habitual denotar o nó que liga a perna ao corpo). O nó tentou torná-lo o mais compacto possível. O servoconversor estará completamente dentro, então você não deve esquecer (o que fiz na primeira vez) sobre o orifício para a saída dos fios.
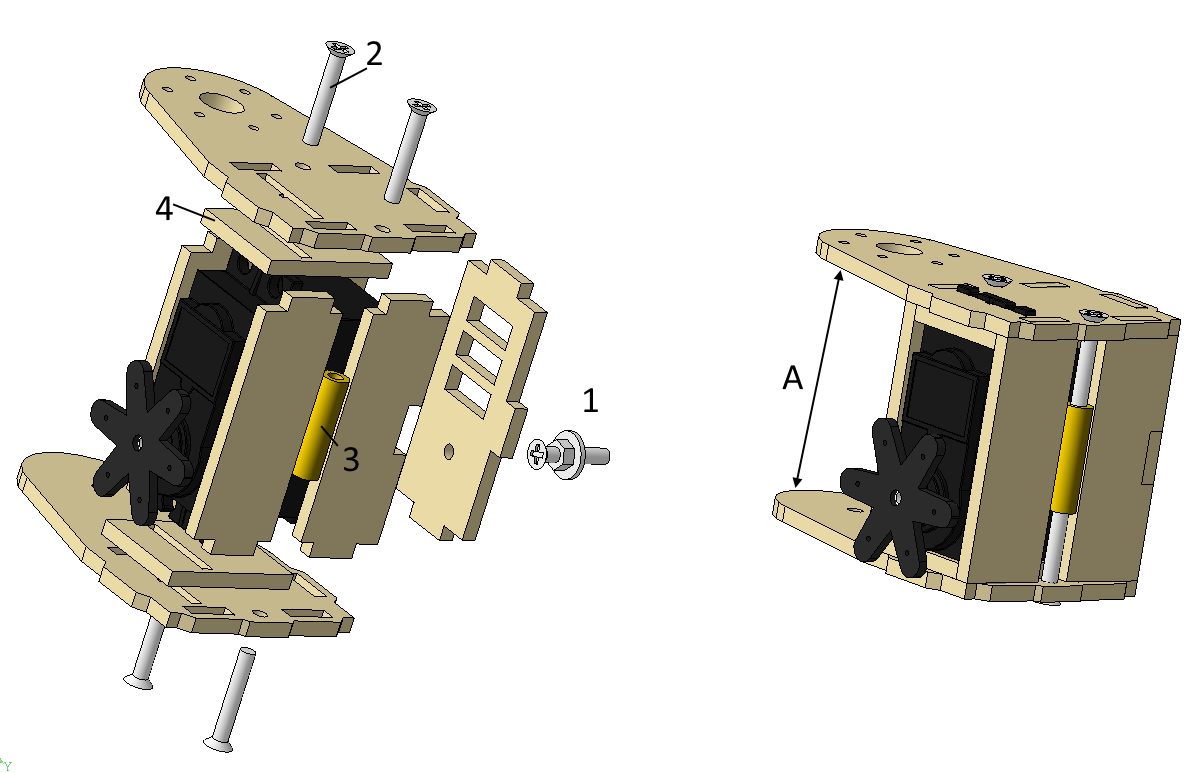 Detalhe 1 - O eixo no qual o fêmur será fixado (a segunda parte da perna). Montado com parafuso M3x15, arruela M3 e porca
Detalhe 1 - O eixo no qual o fêmur será fixado (a segunda parte da perna). Montado com parafuso M3x15, arruela M3 e porca
Parte 2 - Parafuso M3x20
Parte 3 - Rack para PCB M3x20
Detalhe 4 - São uma espécie de servo travas para impedir que se mova na vertical.
A altura (A) deste nó deve ser feita para que o servoconversor que fica na estrutura possa caber no interior.Fêmur
Em seguida, você precisa fazer o "Fêmur". O detalhe acabou sendo o mais simples de todos e acho que não precisa de comentários.
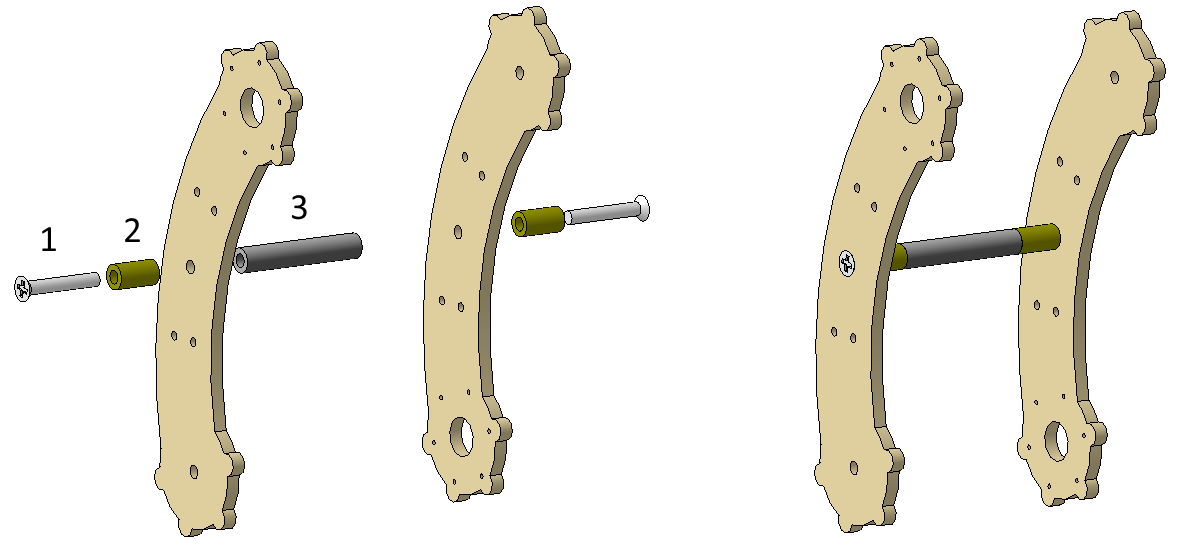 Parte 1 - Parafuso M3x20
Parte 1 - Parafuso M3x20
Detalhe 2 - Luva plástica 3x10 (não encontrei um suporte longo, tive que procurar outras soluções)
Parte 3 - Rack para PCB M3x30Tibia
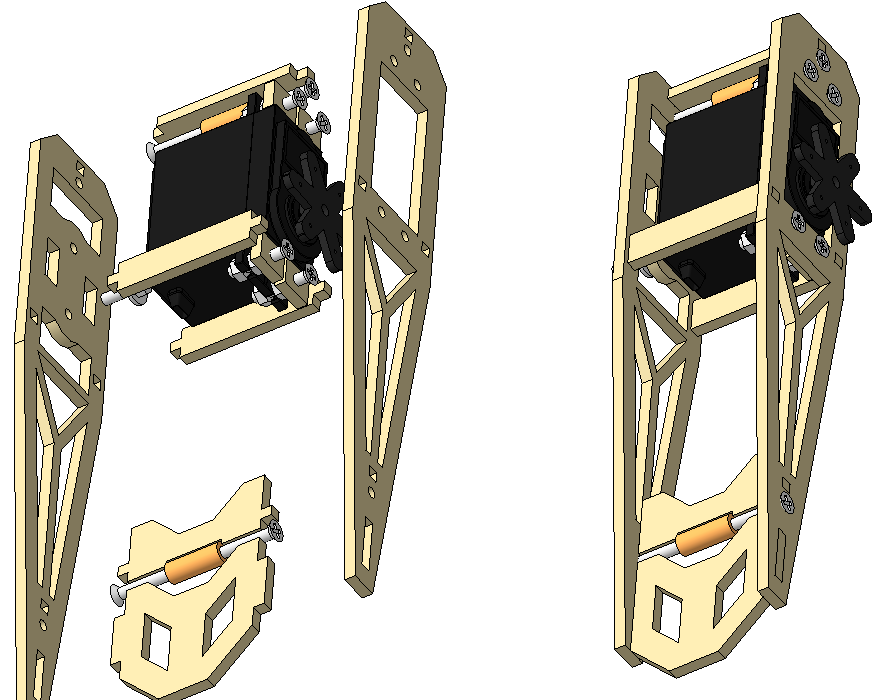
O próximo detalhe é o Tibia, a última parte da perna. Não deve haver problemas com ele e seu comprimento depende da altura em que o robô está planejado para entender. Eu o tenho a 130mm do eixo do servo, não o fiz mais, pois com o aumento do comprimento a carga nos servos também aumenta, principalmente no servo de Coxa. No segundo lado, fiz um segundo furo para o eixo, para que o servo possa ser virado e o comprimento da alavanca possa ser reduzido se, de repente, os servos estiverem duros.
Moldura
O próximo na fila é o quadro - a maior parte. É ela quem determina a configuração das pernas do futuro robô. Existem várias opções para a localização das pernas, mas eu me conformei com a letra Zh (quando vista de cima, parece).
Nos primeiros estágios do design, surgiu a pergunta: "E a que distância as pernas devem estar uma da outra?" Em busca de uma resposta para essa pergunta, percebi que não há recomendações sobre esse assunto. Estudando os projetos de outras pessoas e as opções de marcha, ele concluiu que a distância é selecionada com base no ângulo de rotação máximo desejado do membro. Quanto maior a distância entre as pernas, maior o ângulo que os membros podem alcançar enquanto caminham.
Os desenhos de
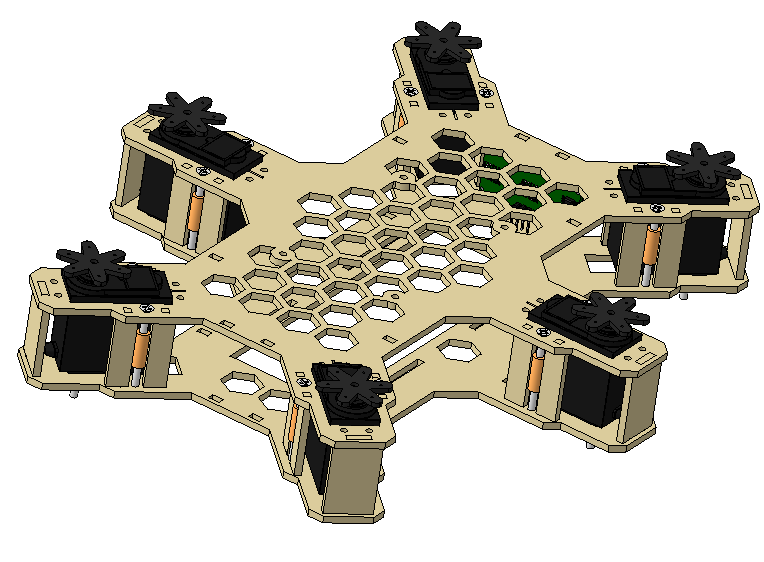
Tomnewmann me ajudaram a resolver esse problema, do qual tirei a distância entre as pernas, já que as dimensões dos robôs eram bastante semelhantes (a minha é um pouco menor). Poucas horas depois, nasceram as partes superior e inferior do quadro:
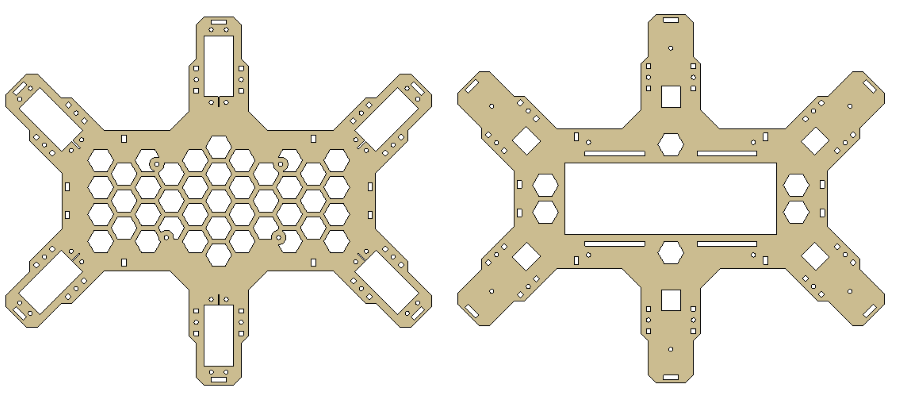
Na parte inferior do quadro, é feito um recorte para a bateria e seus prendedores. A propósito, ele será preso com velcro, que é usado em quadricíclicos ao conectar a bateria a eles. O quadro é bastante grande. Depois de passar mais uma noite e fazer peças intermediárias na forma de suportes entre as peças, decidi que era hora de montar a estrutura com os servos instalados. O resultado não demorou a chegar:
Como já temos todos os componentes necessários, você pode fazer uma montagem completa do gabinete:
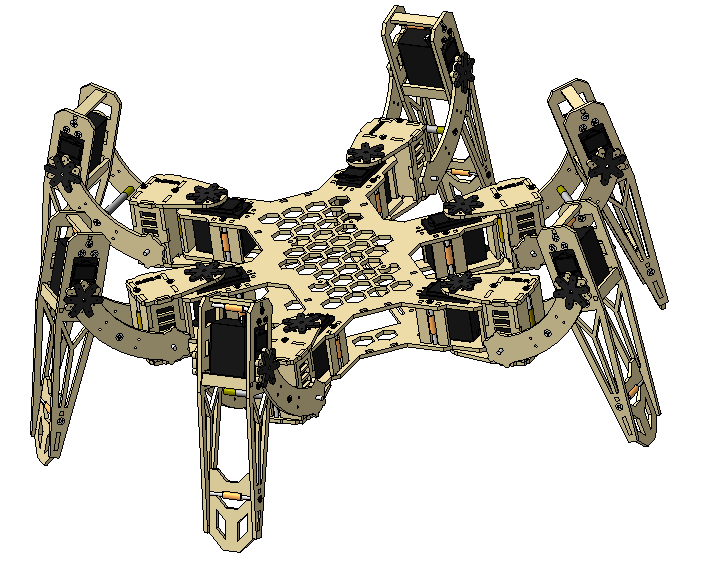
No centro do gabinete entre as placas, planejava-se colocar uma fonte de alimentação para servos, uma bateria 3S Li-po abaixo e uma placa de controle (Arduino Due) na parte superior. Por conseguinte, alterei a montagem do quadro:
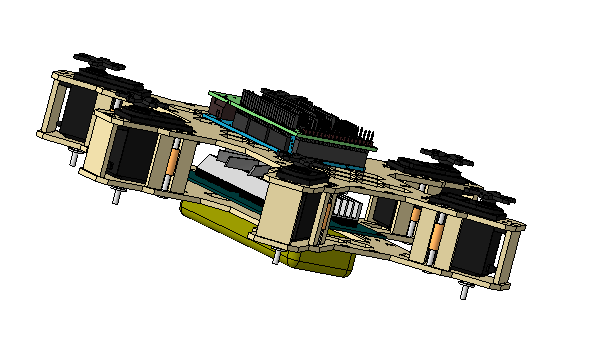 A placa na parte superior é um modelo Arduino Mega com algum tipo de escudo. É usado apenas para a aparência e tem as mesmas dimensões que Due.
A placa na parte superior é um modelo Arduino Mega com algum tipo de escudo. É usado apenas para a aparência e tem as mesmas dimensões que Due.Não parece muito bom, mas levar em conta os fios que ficarão presos será ainda pior. Além disso, o corpo me parecia muito magro. Decidi cobrir o máximo possível de eletrônicos sem afetar a aparência e criar um nome para minha ideia.
A solução para o primeiro problema foram as tampas na parte superior e inferior, cobrindo a bateria e os componentes eletrônicos de controle. Estas são as únicas peças que serão montadas com cola. Uma noite depois, um modelo de capa inferior nasceu.
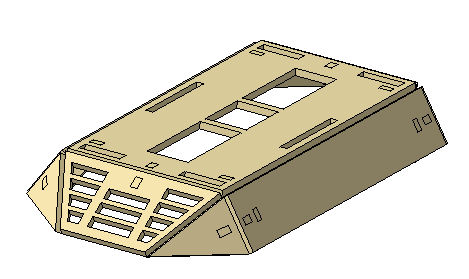
Se não houve problemas com a primeira tarefa, então com a segunda tarefa houve dificuldades por 2 dias. Sim, levei muito tempo para criar um nome para ele. Recordar acidentalmente o filme "Terminator" decidiu chamá-lo de "Skynet" e cortar o nome na capa. Também foram adicionados recortes para o HC-SR04.
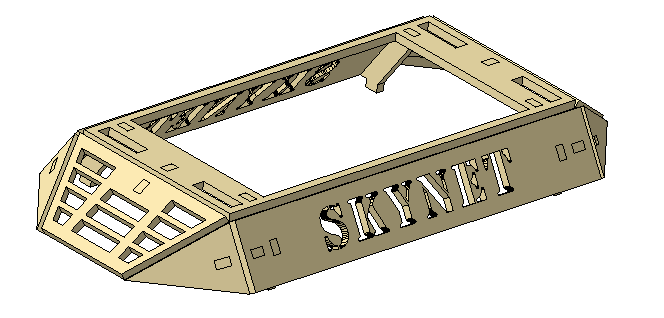
Como resultado da adição de apenas dois telhados, o corpo mudou significativamente a aparência para melhor:

Fiquei impressionado com o resultado e o visual é bastante atraente. Na
segunda parte , falarei sobre a montagem do caso e um ancinho em que pisei.