
Oi
Sou pesquisador, colegas do CROC me pediram para contar como remodelamos drones, como programar um voo e como processar tudo posteriormente, transformando imagens tiradas de um drone em ortofotomapas detalhados, modelos tridimensionais de alta precisão e planos topográficos em uma escala de 1: 500–1 : 10.000.
Minha equipe e eu tentamos vários drones diferentes e, por fim, decidimos pelo DJI Phantom 4 PRO, "cavalo de batalha", com várias modificações. A primeira e mais importante coisa que fizemos com ele foi equipá-lo com um receptor GNSS geodésico, o que nos permite determinar os centros de fotografia com precisão centimétrica.
Seu GPS padrão forneceu precisão da ordem de 15 a 20 metros. Para resolver problemas geodésicos com tanta precisão, você precisa de cruzamentos especiais no solo ou algum outro tipo de distorção, como colocar placas de papel em coordenadas conhecidas.

Tornamos as coisas mais simples e complicadas: colocamos uma estação base terrestre com coordenadas exatamente conhecidas e integramos um receptor GNSS adicional ao drone e instalamos uma antena externa. Por exemplo, começamos com o MATRICE 600 com o sistema DJI instalado a bordo do D-RTK, que era muito pesado, caro e não conveniente para a solução de tarefas geodésicas.
Em seguida, refazemos o DJI PHANTOM 4 PRO mais compacto: conseguimos integrar equipamentos GNSS adicionais em um pacote padrão. A massa total do drone aumentou cerca de 100 gramas. O tempo de vôo foi levemente danificado, mas não crítico: um conjunto de quatro baterias é suficiente para concluir uma pesquisa de 200 a 300 ha.
O fantasma deu uma importante oportunidade - o conjunto principal começou a caber na bagagem de mão de uma aeronave de passageiros. Ou seja, agora podemos transportar todo o conjunto de equipamentos conosco para qualquer lugar, muito, muito simples.
O conjunto mínimo é um drone modificado (todo o conjunto), um receptor geodésico do GNSS como estação base terrestre, um laptop com um programa de planejamento de voo, um mapa baixado (para trabalhar sem a Internet) e um plano de vôo escrito para esse ponto, se houver essa oportunidade com antecedência. Ainda precisa de baterias adicionais, um carregador (ou vários) e um gerador. Tomamos um gerador de gasolina, feito sob a forma de um estojo, é muito conveniente para as nossas necessidades. Ou um inversor para ser alimentado por um motor de carro. Em algumas regiões, você precisa tomar mais aquecimento (em particular, baterias e mãos).
Com uma bateria, você pode fotografar 50 hectares com uma resolução de 2 a 5 centímetros por pixel.
Trabalhamos assim: chegamos ao local com a tarefa do drone detalhada com antecedência (no escritório). Usamos o UgCS (este é um software profissional de planejamento de voo de drones, bastante caro, que vende e aconselha a integração e melhorias de CROC na Rússia. É claro que esse software é aplicável não apenas em geodésia, pode ser usado por equipes de resgate, agrônomos, construtores, etc., mas nessas áreas eu não sou forte, então todas as perguntas são para colegas do CROC). Nele, indicamos os limites da área de trabalho, a sobreposição transversal, a altura da fotografia e, em seguida, o próprio software calcula a rota de vôo do drone, levando em consideração as características do terreno. Ou seja, o UgCS corta tudo como deveria: com pousos intermediários para substituir as baterias e o resto.
Nós olhamos para ver se existem obstáculos não contabilizados, então montamos a estação base GNSS. As coordenadas dos pontos de aterramento são especificadas pelo receptor Topcon GR-5.

Além disso, já existe uma missão de vôo. Aqui estão os limites da zona de sobrevôo e a sobreposição longitudinal ou transversal da colagem. Colocamos um par de pontos de contraste de controle para controle:

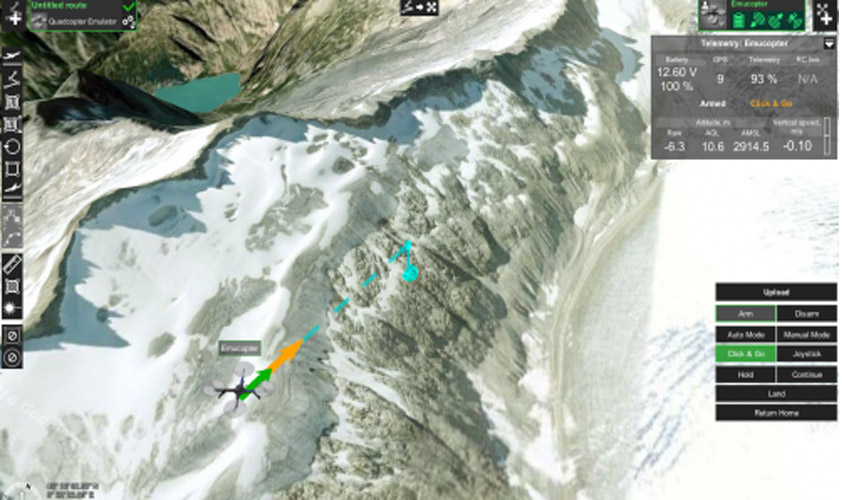
Para conectar um piloto automático a partir do GNSS, conectamos o drone ao controle remoto, o controle remoto a um tablet com um programa de controle DJI e o tablet a um laptop. A configuração deste pacote em movimento não é fácil. Aqui, meus colegas da CROC me ajudaram significativamente: instalar, ajustar, testar antes do lançamento.
O próximo ponto é que aproximadamente cada terceiro objeto está localizado onde não há acesso estável à Internet. O software lida com isso. Mas também existem áreas difíceis, por exemplo, montanhas, onde os problemas com a propagação do sinal já estão começando. É por isso que usamos o Phantoms: eles têm muitos sensores embutidos para evitar obstáculos. Quando ele perde o contato, ele volta. Quando ele não pode voltar, ele começa a se sentar. E esses sensores ajudam você a voar em condições difíceis, como terras altas ou na cidade. Tivemos vários casos em que os sensores de obstáculos ajudaram a evitar uma emergência. Por exemplo, nas montanhas do emirado de Fujairah (Emirados Árabes Unidos), perdemos contato com o drone e, devido ao vento, o drone não pôde retornar ao ponto de decolagem. Então o piloto automático decidiu aterrissar e, usando sensores de obstáculo, pousou o drone na fenda entre as duas encostas da cordilheira em uma área relativamente plana.
O resultado do voo do drone são as fotografias nesses pontos (este software para processamento já destaca seus centros):
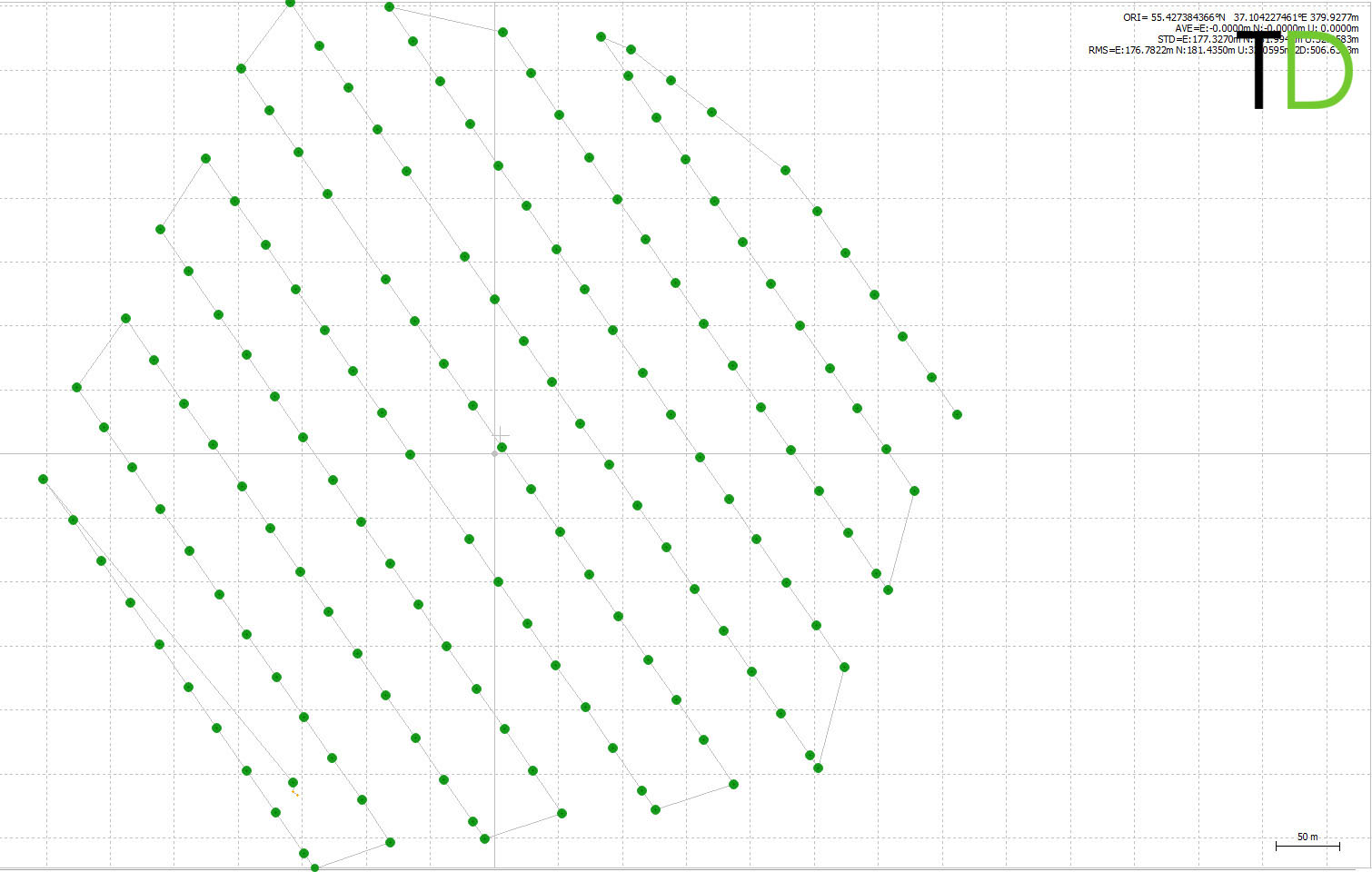
As medições do GNSS são baixadas separadamente via Wi-Fi após a conclusão do voo, são armazenadas no drone e não são transmitidas para o solo em tempo real.
Você pode sair ainda mais, porque o próximo passo é o processamento fotogramétrico de fotografias aéreas. As coordenadas dos pontos de controle de solo são usadas apenas para controle:

Aqui está uma nuvem de pontos após a classificação. A cor destaca a vegetação, suportes, fios de linhas elétricas, edifícios e estruturas:
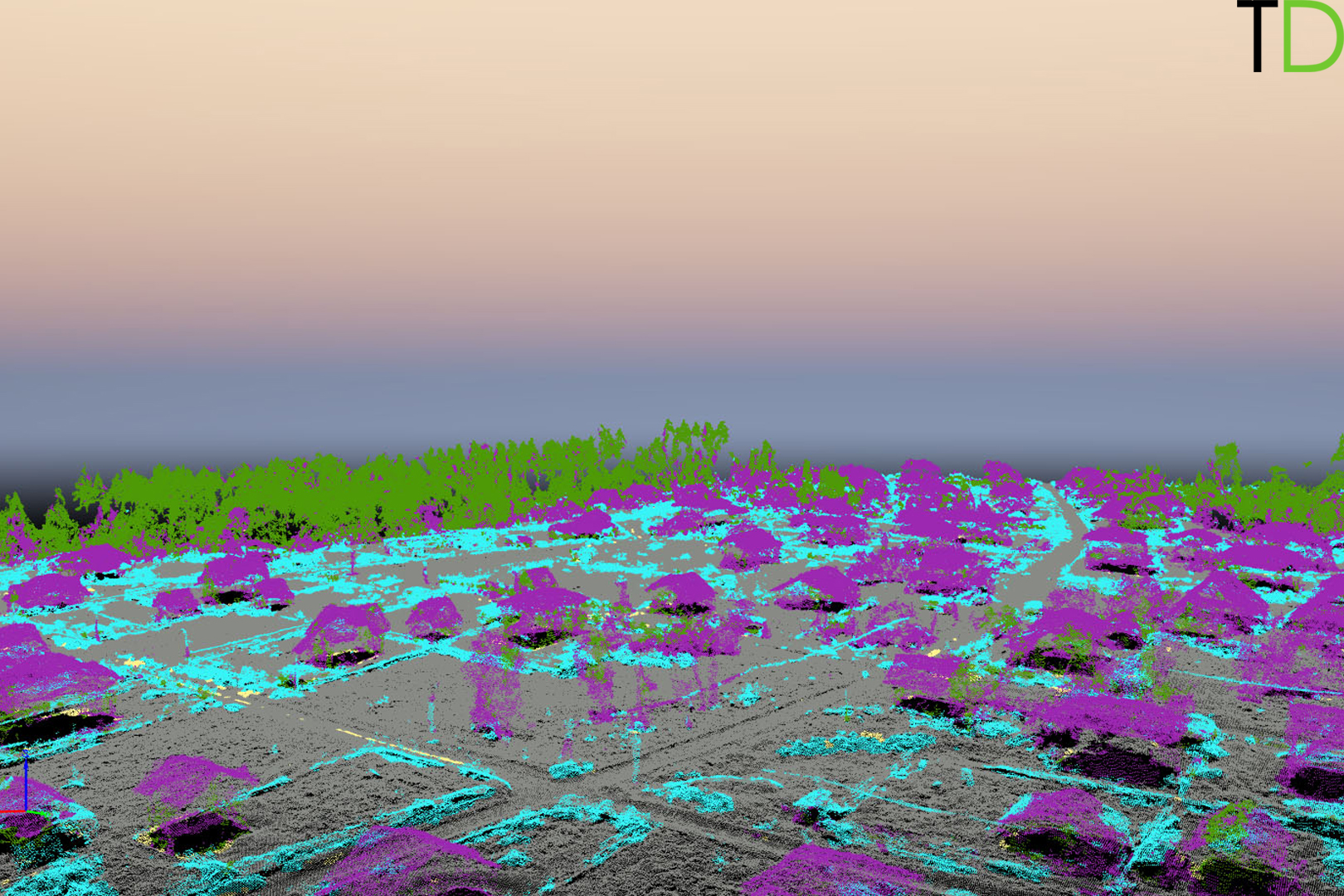
E este já é um modelo 3D para esta nuvem:

Nesta aldeia de chalé, a tarefa era simples: 5 cm por pixel, paisagem simples, um mínimo de árvores, sem interferência. Recebemos o ortofotomapa e o combinamos com o plano cadastral:
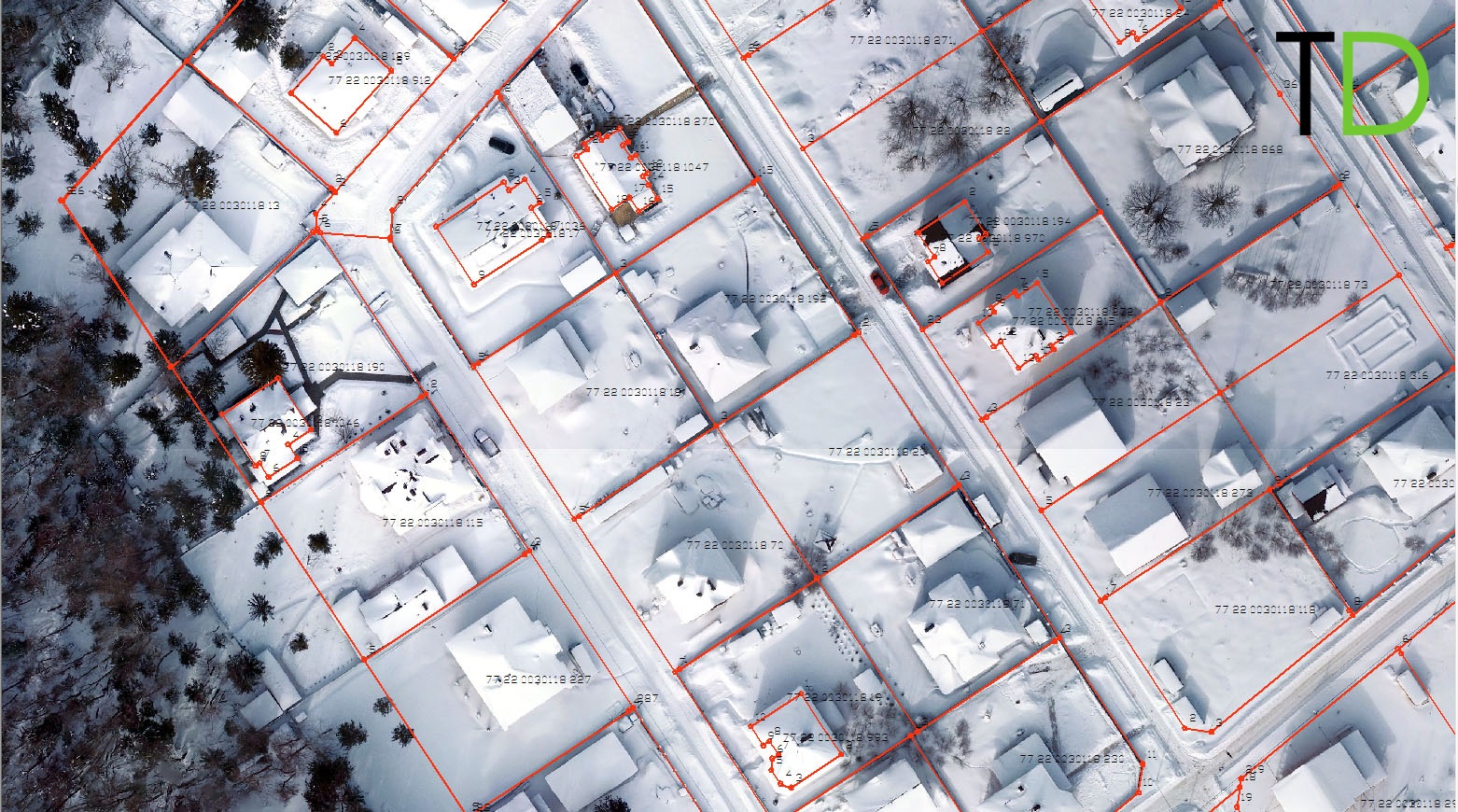
Pode ser usado para levantamento de terras, inventário e avaliação cadastral de terrenos, avaliando a eficácia do uso da terra, projetando o desenvolvimento de territórios, projetando e levantando obras, reconstrução e desenvolvimento de redes de estradas, monitorando o status das comunicações terrestres e subterrâneas, oleodutos, linhas de transmissão etc. monitoramento de terras com o objetivo de proteção, monitoramento ambiental de limites e áreas de terra sujeitas a alterações; criação de modelos tridimensionais de terreno para SIG.
Por que UgCS? Como não existem outras opções no mercado, todo o resto é de nível amador. É muito conveniente que qualquer drone possa ser colocado em uma missão e ele simplesmente voará: toda a linha DJI é suportada, incluindo Maviki e uma dúzia de outros drones populares em geodésia. Não existe nenhuma ligação ao ferro. Muito bom planejamento - do escritório. Controle normal de um laptop com joystick ou CLICK & GO, boa geocodificação de imagens para Photoscan ou Pix4D. Há software alternativo no mercado sem ter que carregar um laptop, mas com muito menos recursos. Um laptop é uma enorme vantagem, mas também uma maldição do sistema: complica bastante as viagens de negócios. No inverno, tudo isso se torna ainda mais complicado devido ao fato de as baterias de todo o pacote congelarem e você precisar trabalhar com luvas (o que não é muito preciso). Mas ainda não há outras opções: tanto inconveniente ou recursos limitados.
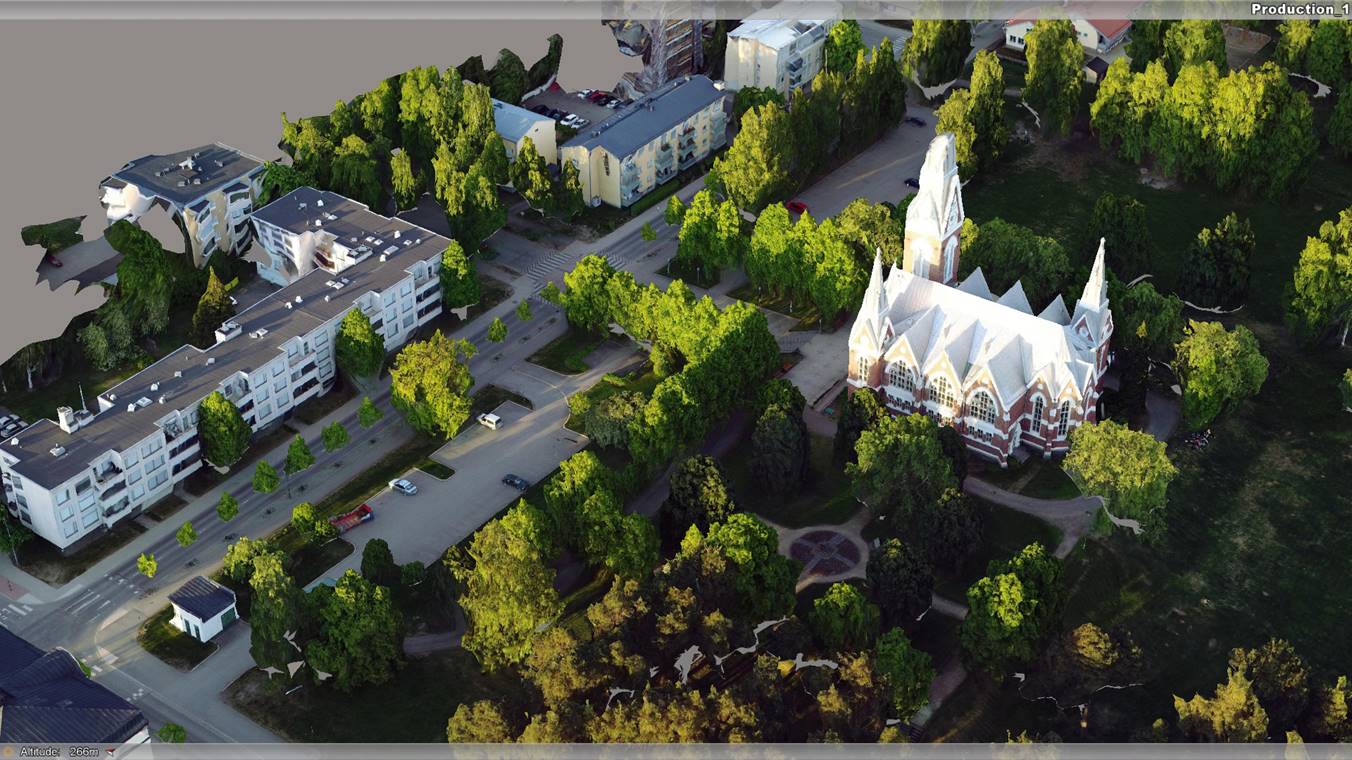
Aqui está um exemplo do resultado de um modelo de cidade tridimensional:
Aqui está outro objeto - um modelo de pedreira tridimensional:


Aqui está uma história.
Referências