No contexto do queApós o início de emergência da União, o ilustre
Zelenyikot escreveu um
pós- brinde inspirador para a saúde do programa espacial. E aqui está o que os comentários encontraram:
Um número significativo de cidadãos de Khabrovsk acredita que o desenvolvimento da astronáutica é principalmente o desenvolvimento da astronáutica
tripulada . Assim foi no passado e deveria ser no futuro.
Ao mesmo tempo, muitos residentes de Khabrovsk acreditam que os programas espaciais tripulados, em particular o trabalho das equipes da ISS, estimulam poderosamente o desenvolvimento de novas tecnologias e ciências em geral. As pessoas em órbita estão fazendo algo inteligente, complexo e muito, muito importante. E pessoas ainda mais incrivelmente inteligentes trabalham em laboratórios terrestres, fornecendo esses experimentos: eles pensam, processam os dados inestimáveis obtidos, criam ferramentas de precisão astutas à beira da ficção científica, sem as quais esses experimentos não podem ser realizados ...
Proponho ver como,
de fato, tudo funciona, usando um exemplo concreto.

Resumo: diversos, falta de tolerância, nenashi. E um pouco sobre como cuidar do espaço. (+ Criticar - ofereça!)
A parte real, TTX - Um pouco de análise: o que está escondido atrás do TTX, como é o alvo dos drones dentro da estação orbital e qual é o destino deles na ISS real; porque acontece - e como poderia ser? Escalada em fantasias que se transformam em Ano Novo1. Visão Geral do Drone1.0 Local de encontro: ISSPor que a ideia de drones é atraente na ISS?
Basta lembrar as principais reivindicações dos drones quando são usados em terra:
- muito barulhento;
- tempo de voo curto.
Tanto o primeiro como o segundo devido ao fato de os motores do drone terem que lidar com a gravidade. Os motores são forçados a trabalhar acima de um certo limite de potência (caso contrário, o drone simplesmente não decola). Motores elétricos consomem rapidamente a bateria; Enrolamentos e parafusos carregados que sacudem o ar em alta velocidade criam um som nítido e poderoso.
Na ISS, onde não há gravidade, os motores podem funcionar tão fracamente quanto quiserem. Você pode consumir muito economicamente a bateria; não haverá barulho alto.
Além disso. Como a própria ISS é um local bastante barulhento (ventilação forçada, muitos racks com equipamentos em operação constante, sistemas de suporte à vida e manutenção da orientação da estação - o consumo total é de cerca de 50 kW), o drone, com operação moderada do motor, embora formalmente faça barulho, mas na prática seus propósitos podem ser considerados silenciosos. Não será outro distúrbio sonoro irritante para as pessoas na estação.
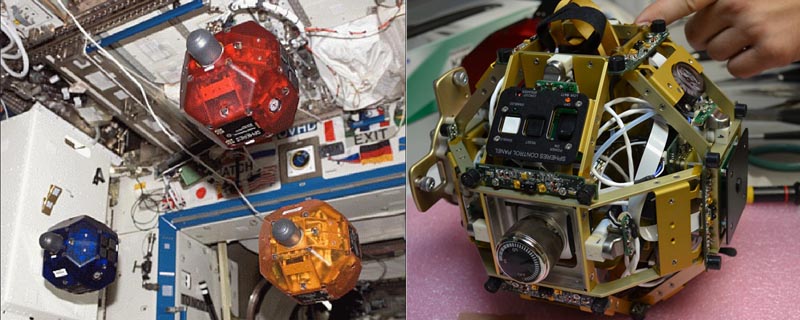
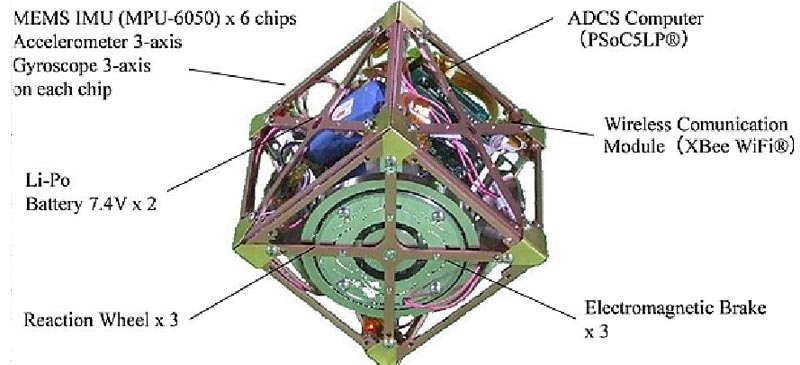
1.1 Esferas (EUA)De acordo com o passaporte, com o jogo de acrônimos: SPHERES (Posicionamento sincronizado, mantenha engate, reoriente os satélites experimentais). Propriedade da NASA. Criado no MIT pela concessão da DARPA.
Peso: 4,3 kg.
Tamanho: 22 cm.
 (Fontes de materiais gráficos: NASA, JAXA, ESA.)
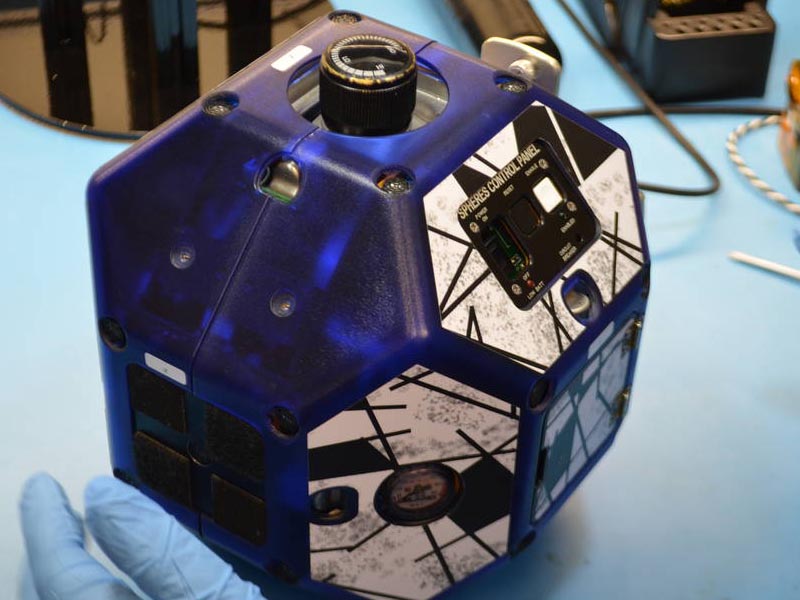
(Fontes de materiais gráficos: NASA, JAXA, ESA.)Vários drones idênticos, dos quais três entraram em órbita: azul, vermelho e laranja. Primeiro Blue, em 2006. Um pouco mais tarde, o resto, com firmware aprimorado.
Estes não são exatamente drones no sentido em que colocamos “drones” na terra, significando principalmente helicópteros amadores (quadro) ou profissionais (hexo, octo). Esferas não são helicópteros. Eles não têm parafusos, mas bicos. Propulsão puramente a jato, gás comprimido.

O cilindro é carregado com 170 g. A partir disso, o gás é distribuído para 12 bicos. Aceleração máxima: 17 cm / s
2 em movimento, 3,5 rad / s
2 em rotação.
Mas é exatamente isso que as acelerações máximas são, em operação normal, acelerações não são quase as mesmas. Em experimentos reais, as Esferas se movem
muito lentamente .
Comunicação completa: canais de rádio nas frequências de 868 e 917 MHz.
Alarme: sinal infravermelho.
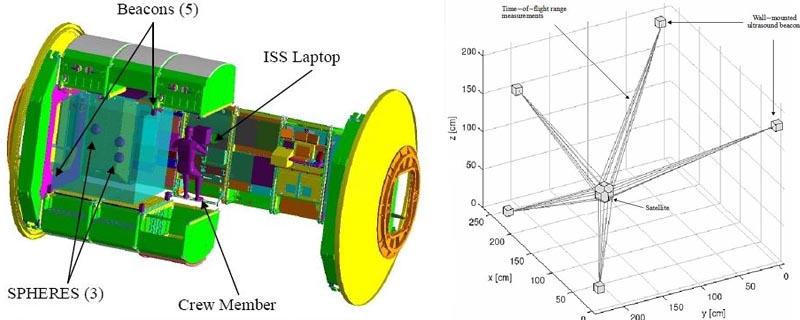
Sensores: receptores ultrassônicos.
Não há câmeras de vídeo, mas são fornecidas montagens para o kit corporal. Inicialmente, a unidade VERTIGO foi usada como uma câmera de vídeo, cuja base são duas câmeras para criar imagens estéreo. Então, quando os smartphones se espalham, apenas um smartphone.

Inicialmente, a navegação era em receptores ultrassônicos. Esses nem são sensores de distância; eles próprios não emitem ultrassom. Para isso, cinco faróis foram fixados dentro do laboratório americano. Quando você precisa determinar sua posição, o Sphere fornece um flash infravermelho. Este é um sinal para beacons. Eles se revezam, com atrasos diferentes, emitem um sinal ultrassônico. A esfera capta esses cinco sinais. O atraso diferente inicial é necessário para que os sinais não se sobreponham e a análise seja o mais simples e confiável possível - portanto, os beacons nem possuem assinaturas diferentes. A hora real de chegada do sinal permite calcular o atraso secundário associado à distância da esfera até cada um dos faróis.
Tudo é o mais simples possível. Talvez porque os alunos começaram a se desenvolver, o que foi considerado fracamente por seu supervisor, lembrando um
episódio de um famoso filme infantil .
Os desenvolvedores consideraram a parte eletrônica dos drones o lugar mais vulnerável - por causa da radiação cósmica. Mas os drones passaram mais de dez anos na estação e os problemas foram com o sistema de distribuição de gás até os bicos. No entanto, acabou no chão, durante o reparo do Blue, lançado no "Dragon".
Sintomas semelhantes, não tão graves, ultrapassaram Orange, mas até agora permanece na estação.
1.2 Ball (Japão)Int-Ball (câmera interna com bola). Propriedade JAXA.
Peso: 1,4 kg.
Tamanho: 15 cm.
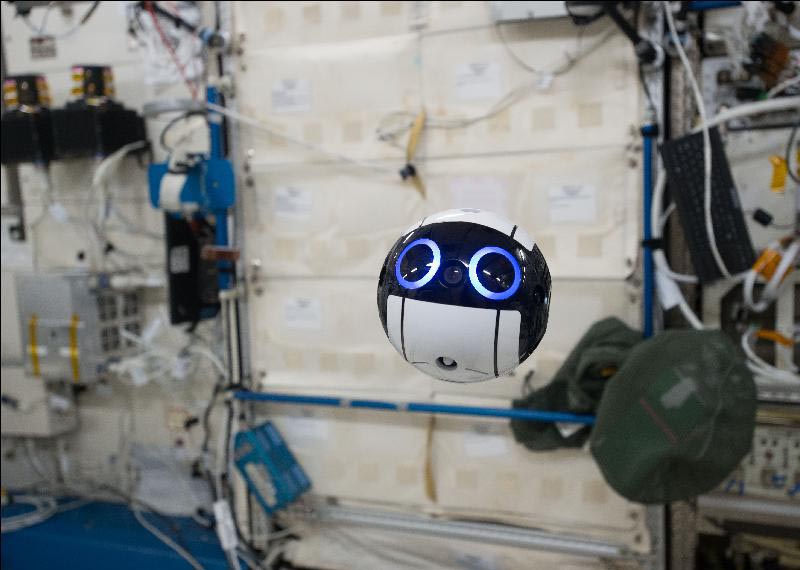
Este mimimi voador foi entregue à ISS no verão de 2017, mas começou a ser usado seriamente apenas um ano depois, quando um astronauta japonês estava na estação. No entanto, formalmente e agora o status da bola ainda é um reajuste.
Para movê-lo, existem 12 pequenas aberturas. Mas para rotação - já existe um bloco de girodinas.
Existe uma conexão sem fio direta e sem muletas (como as Spheres) aos laptops da estação.
Você pode pensar que há câmeras de vídeo nos olhos, mas não.
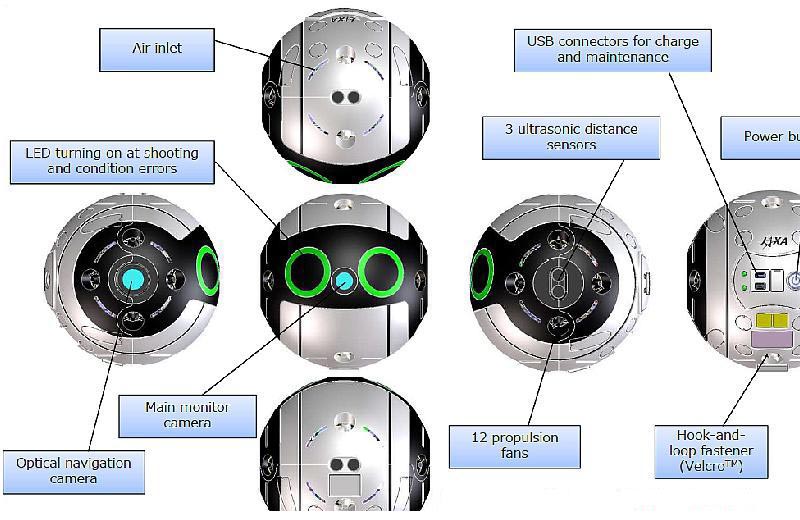
Filmadora doméstica no nariz. Olhos são apenas indicadores. Eles são realmente cinzentos. Quando brilham em azul - este é um sinal de que a câmera principal está funcionando. No caso de uma falha no sistema, eles ficam vermelhos e a visão da bola se torna inesperadamente agressiva.

A bicicleta já está andando e, pela primeira vez, o Ball assustou o astronauta americano que não esperava isso.
Do lado de estibordo existe uma câmera auxiliar, a navegação. Para ela, dois marcadores foram colocados no laboratório japonês (a mancha rosa vyrviglazno-rosa). Geralmente eles estão em extremidades diferentes do módulo, um abaixo do limiar e o outro na tampa do mini-gateway, mas podem ser movidos livremente.
No lado esquerdo da bola existem sensores de distância ultrassônicos.
Em conexão com problemas da moda, enfatiza-se que partes do corpo foram impressas em uma impressora. (E então eles foram polidos e polidos por muito tempo, milagres não acontecem.)
No modo offline, a bola ainda não funcionou. Seu movimento é controlado por dois operadores na MCC japonesa.
Uma vez por mês, o
diário em vídeo é atualizado.
1.3 Simon (Europa, mais especificamente a Alemanha)CIMON (companheiro móvel interativo da tripulação), em homenagem ao
Prof. Simon Wright . Sob os auspícios da ESA, fabricada pelo Centro Alemão de Aviação e Espaço nas instalações da Airbus alemã, com a participação da IBM.
Peso: 5 kg.
Tamanho: 32 cm.

Entregue à ISS "Dragon" neste verão.
Uma descrição detalhada ainda não foi enviada, existem apenas os dados mais gerais: 14 parafusos. No nariz, há um monitor e uma câmera de vídeo; nas laterais, existem mais duas auxiliares.

Sistema Linux. A IBM criou uma versão portátil do
Watson , que não requer dezenas de servidores ou conexão de terra.
Se de repente você decidiu que os drones são algo "com a IA da IBM!" eles podem manobrar normalmente, e agora finalmente
parece pelo menos um pouco
legal - aqui estão
as fotos dele nos escorregadores de ar . No primeiro teste, descobriu-se que sua capacidade calculada de manobra é mais fraca do que os remanescentes de não inércia no laboratório de aviação europeu (orgulhosamente chamado ZERO-G).
Foi planejado que, em outubro, o alemão Alexander Gerst começará a trabalhar com ele, e o reconhecimento de voz e rosto foi preso por ele. E no inverno, Simon será rebaixado de volta ao chão. Mas, aparentemente, devido à
infecção da estação com gremlins malignos , os prazos mudaram. Você pode descobrir sobre o começo no
twitter de Gerst .
2. AnáliseBem, por que drones na ISS?
Há declarações cerimoniais dos criadores, há comunicados de imprensa das agências, mas é claro que, na maior parte, tudo isso é conversa fútil burocrática, onde as perspectivas são inchadas como um sapo através de um cano, e perguntas desconfortáveis são notadas debaixo do tapete.
2.1 Para que servem as esferas?Primeiro de tudo, vamos tentar entender: o design é razoável?
Há ar dentro da ISS. Mas os motores das Esferas usam um princípio puramente reativo. Isso significa que, quando o drone está em execução, há um recurso que é constantemente desperdiçado. A questão lógica é: como esse recurso é reabastecido? Talvez você possa reabastecer o drone diretamente para a ISS (ou seja, do ponto de vista prático, nenhum recurso é desperdiçado)? Talvez algum compressor tenha sido entregue à ISS junto com o drone? Não. O drone usa cilindros intercambiáveis com dióxido de carbono liquefeito. Depois de serem usados em um drone, eles devem ser abaixados no chão, reabastecidos lá e elevados à ISS novamente.
Além disso, mesmo a energia elétrica do drone não está na bateria, o que pareceria óbvio, mas nas baterias. Pilhas AA descartáveis, duas embalagens de 8 unidades cada. Mude para fresco todas as vezes antes de usar, aproximadamente deve ser suficiente por 2 horas. Depois disso, eles só podem ser enviados para o solo, e o drone precisa de novos.
Como uma decisão tão estranha pode ser justificada?
Talvez a ideia fosse que, embora o drone funcione dentro da ISS, ele simule o movimento fora dela, no vácuo? Onde não há ar? Ou talvez até pretendido no caso de ocorrer despressurização da ISS? Então ele poderia se mover dentro da estação no vácuo, assim como um zangão com parafusos não. Isso pode ser útil. A maneira regular de encontrar um vazamento é pelo som, mas esse método só funciona se o vazamento for pequeno e o ar escapar lentamente.
Mas os próprios criadores dizem que o drone não se destina ao uso no vácuo.
Então, talvez, encontraremos o motivo nos experimentos em que esses drones foram usados?
Experiência em anel
Duas esferas, para cada uma, é adicionado um kit de corpo com indutores (anel). Dessa forma, os drones podem interagir magneticamente - repelir, atrair e se mutuamente. Carregue um ao outro sem contato.
Qual é a ideia? A razão para a conclusão da maioria das missões espaciais (bem-sucedidas!) É que o combustível está esgotado. O dispositivo elaborou seu programa básico, e ainda funciona perfeitamente, poderia servir e ainda servir - é apenas que não há mais combustível nos motores. É impossível corrigir ainda mais a trajetória do voo. Pior ainda, é impossível descarregar girodinos, e o dispositivo não pode mais manter a orientação da antena para o solo e dos painéis para o sol - a conexão com o solo, a energia é perdida ... É possível prescindir do consumo regular do propulsor? Se você colocar vários desses "anéis" (por exemplo, na superfície da ISS), entre eles, você poderá dirigir um pequeno satélite o quanto quiser sem gastar combustível - energia suficiente, o que geralmente não é um problema.
No nível das palavras comuns, tudo isso é engraçado. Mas é difícil imaginar um caso de uso real - onde e com que finalidade prática isso pode ser necessário?
Além disso, o experimento em si, na forma em que foi realizado, é completamente inútil; portanto, coisas básicas foram feitas nele.
O que isso dá? Para que foi isso?
Experiência de vertigemDesde 2008, propostas e tentativas de atualização do Spheres começam para que sua navegação se baseie não em beacons, mas em análise de vídeo. Em 2010, o projeto aceita o mesmo DARPA para financiamento, incluindo esses pontos para o drone. Parece que a idéia óbvia e útil é trabalhar em uma versão tridimensional, com o fato de que protótipos de pilotos automáticos de automóveis estão sendo feitos agora em uma versão bidimensional. Além disso, realizado antes desse tópico se tornar um boom.
Mas isso é por um lado. Por outro lado, a implementação do drone na forma de uma esfera é menos adequada para isso.
Mesmo se você fechar os olhos para o fato de as Esferas serem terrivelmente lentas, o que dizer do fato de que o início do voo requer um desperdício de tempo humano (verifique a pressão no cilindro e substitua, se necessário; substitua as baterias por novas) e as horas de vôo são muito limitadas (freqüentes troca de cilindros e baterias e com entrega a partir do solo)?
"Experiência" Halo
Entre aspas, porque o projeto é que um pára-choque seja montado no drone, no qual você pode pendurar qualquer outra coisa.
Provavelmente teria feito algum sentido - se o drone pudesse ser usado como um inspetor regular de drones, pelo menos dentro da estação. Mas as Esferas não podem ser usadas assim, não o TTX. Então, por que isso é tudo?
Mas para o que. Por exemplo, “unidades de acoplamento” estavam penduradas nos kits de carroceria e os drones encaixavam um no outro. Não é um milagre?
Ou aqui está outra: dois drones amarrados com uma corda e assistiram como um pode puxar o outro. E acontece que isso é uma imitação da captura de detritos espaciais. Incrível! Não é?
Respingo da experiência (Slosh)
Ao feixe especial são anexados: nas extremidades existem duas esferas e no meio há um balão transparente parcialmente preenchido com líquido.
As esferas são usadas para torcer, sacudir, oscilar etc. A câmera ao lado do cilindro retira o que acontece no interior. Diferentes graus de enchimento foram utilizados e líquidos com propriedades diferentes.
É claro que, em primeiro lugar, essa é uma analogia do que pode acontecer em tanques com combustível quando eles se encontram em um estado próximo à gravidade zero. Portanto, o experimento está ocorrendo com a participação de grandes fabricantes reais.
Em geral, esse experimento parece o mais convincente de todos os outros. O que nos faz usar reservas de qualquer maneira? Um design com um roqueiro e o Spheres como acelerador é uma coisa extremamente desajeitada. O trabalho dos propulsores das Esferas, especialmente com o passar do tempo, está longe de ser preciso. O uso do Spheres como parte da instalação impõe restrições estritas à duração do experimento, é impossível conduzi-los por um longo tempo e de modo automatizado (sessões com o Spheres - algumas horas em algumas semanas). Parece que se houvesse interesse real em tais experiências, seria alocado um lugar nas estantes e um pequeno agitador de aparelhos seria instalado ali, aguçado para tais experiências. E se não havia lugar nas estantes, mesmo assim: não era mais razoável fazer uma moldura com girodinas ao redor do cilindro do que fixar extremidades longas às quais as Esferas estão penduradas, bastante volumosas, mas fracas e imprecisas em termos das acelerações sendo criadas?
Ou seja, permanecem dúvidas sobre a necessidade de esferas para esse experimento. E eles são apoiados pelo fato de que todos os seguintes modelos de drones não foram testados para algo assim.
Então, por que as Esferas eram necessárias?Permita que os alunos experimentem - a experiência e o interesse deles em entrar na esfera espacial são mais importantes do que os benefícios reais de esferas específicas na ISS?
Ou, mergulhando na teologia da conspiração, muito pelo contrário: a DARPA financiou esse projeto para confundir os valentes militares russos e chineses? Como, veja, que protótipos de inspectores de satélite estão surgindo conosco ... Se fôssemos inspectores legais de satélites - financiaríamos um abraço e um grito assim? Não temos inspetores de satélite!
Ou será que os burocratas extras da NASA e da DARPA, que não são de uso real, são forçados a criar a aparência do trabalho para justificar sua existência? Isso tudo é apenas "domínio" dos fundos? E, ao mesmo tempo, o preenchimento formal do horário de trabalho dos astronautas "não é em vão, nós os levamos lá e voltamos"?
2.1 Por que precisamos de uma bola?Aqui o objetivo é declarado imediatamente, de forma muito clara e convincente.
Vamos dar uma olhada em como as experiências com as pessoas na ISS são organizadas.
Um homem, ainda na terra, ensina um plano de trabalho, treina. Mas! Como as pessoas estão sendo abandonadas na ISS por seis meses, e há poucas, é impossível deixar o astronauta idealmente pronto para cada um de seus experimentos e fazê-lo com a habilidade de um assistente de laboratório que trabalha com esse equipamento há anos. Mas um experimento é necessário mais ou menos rapidamente, não é monótono, existe um cronograma. Portanto, quase todo experimento está sob a supervisão da MCC. O astronauta monta uma câmera no suporte, apontando para o local onde ele trabalhará. E o MCC pode não apenas responder suas perguntas - mas também corrigir imediatamente se ele já está fazendo algo errado, sem perceber.
Obviamente, uma câmera estacionária no suporte não é uma opção ideal. Às vezes, você quer mostrar uma foto de perto - o que há sob os dedos dele. Às vezes isso é realmente importante. O experimento pode ser adiado ou cancelado, mas no caso de prevenção ou reparo de sistemas de suporte à vida, não há para onde ir, e um erro pode levar a grandes dificuldades. Portanto, você precisa ligar para alguém da equipe: um está trabalhando, o outro está segurando a câmera, decolando por cima do ombro.
Os japoneses afirmam que mexer com câmeras leva até 10% do tempo.
Aqui, é claro, não está completamente claro se essa afirmação não é esperta - eles consideraram o tempo dos astronautas dentro do trabalhador ou incluíram tudo o que podiam: os astronautas em seu tempo livre gostam de fotografar em vigias; é considerado uma boa forma para que todos gravem sua excursão em vídeo pela estação, pelo menos uma vez por expedição; você precisa manter vlogs e participar de pontes de vídeo, porque isso é necessário para popularização / por razões políticas e de imagem. Então, na realidade, a porcentagem de tempo pode ser diferente.
Mas isso não muda a essência: por que não liberar esse tempo para algo realmente útil?
A bola é declarada como uma câmera móvel universal, o que deve economizar esse tempo.
O drone funciona assim na realidade?Uma imagem bastante medíocre vem da Ball (se comparada com câmeras completas com boas lentes que são montadas na ISS nos suportes). E que outra imagem pode vir de uma câmera compacta com uma lente minúscula?
A mobilidade é ainda pior. As limitações da diversão de Sharik estão obviamente relacionadas ao resseguro, o poder dos parafusos é subestimado especialmente. Isso pode ser alterado no futuro se a parte do software (navegação e manobras de imagem) for confiável e eficiente. Mas este é apenas o grande problema. Se tomarmos tecnologias "terrestres" semelhantes como ponto de partida - o que está sendo feito no campo dos pilotos automáticos de automóveis - parece que esses especialistas e desenvolvimentos não estavam envolvidos, e no JAXA tudo é feito do zero, quase por iniciantes neste campo.
No entanto, o maior problema nem é isso.
Suponha que a bola seja capaz de reconhecer o ambiente com confiança e manobrar com precisão nele. Isso é suficiente para o drone se tornar um operador assistente - como, digamos, outro membro da tripulação com uma câmera?Os proprietários de drones estão bem cientes da resposta. O piloto automático tem bom desempenho quando recebe uma tarefa clara: os pontos de verificação da trajetória são inseridos ou o objeto principal é definido. No caso de um carro, esse caso de uso é bastante conveniente. No caso de drones, é necessário mais - interação com o operador à medida que a tarefa de vôo é refinada, incluindo condições de pouso que não são especificadas antecipadamente (lembre-se de todas as histórias engraçadas, por meio de lágrimas, de drones que não foram entregues ao proprietário).Para um drone assistente na ISS (um assistente na realidade, não um comunicado de imprensa), será necessário principalmente a interação com uma pessoa. Convenienteinteração. Não superficialmente, no nível de comandos verbais claros ou gestos formalmente prescritos, como um controlador de tráfego. E como acontece no caso de duas pessoas reais fazendo algo juntos. Você prediz as ações e intenções de outras pessoas no início do gesto, de acordo com a direção do olhar, como uma ordem encorajadora; pode haver apenas uma rápida olhada e outras reações miméticas-comportamentais, óbvias na situação real e extremamente difíceis de formalizar.Mas, para que isso se torne realidade, o drone deve estar equipado com uma IA muito inteligente - capaz não apenas de manobrar, mas de entender o que está acontecendo. Caso contrário, seu uso não será de ajuda, mas outra tarefa difícil que o astronauta será forçado a ter em mente paralelamente ao trabalho principal. Só haverá excesso de carga, irritação, erros.O desenvolvimento dessa interação está agora em sua infância, principalmente porque nesse estado o desenvolvimento de uma IA forte. Sem criar uma IA forte, essa tarefa pode ter, na melhor das hipóteses, uma solução intermediária semelhante aos tradutores automáticos atuais - uma interlinear com erros que precisam ser corrigidos por uma IA forte na forma de uma pessoa. Sem uma IA forte, o drone assistente precisará ser constantemente monitorado de uma maneira ou de outra - e intervir regularmente em suas ações! - operadores no solo.2.3 E aqui está Simon!Aparentemente, os desenvolvedores do Simon entendem isso. Eles também entendem que, do ponto de vista econômico, o esquema usado pelos japoneses com Sharik - pelo menos dois especialistas permanentemente empregados na Terra para economizar 10% do tempo de um cosmonauta - é, na melhor das hipóteses, uma festa.Portanto, outros objetivos são declarados.Simon simplesmente seguirá discretamente o proprietário, será seu assistente de voz, além de coletar dados para uma análise psicológica das condições da tripulação.Isso é Propõe-se levar a tecnologia já implementada em drones terrestres. Em seguida, dê ao astronauta em órbita um assistente de voz artificial (ler, burro) - quando o astronauta em seu fone de ouvido já tiver assistentes ao vivo no MCC. E como uma cereja, faça uma versão passiva do que está sendo feito na Terra de forma ativa, usando métodos muito mais sofisticados em projetos como o "Mars 500". Se este não é um grande passo para toda a humanidade, então o que é?Apesar de tudo isso, Simon ainda pode ser um benefício real. Apenas não relacionado a tudo isso, não é óbvio para os compiladores de press releases.2.4 Limpeza do espaçoSe você assistir a vídeos da ISS com atenção, prestando atenção ao comportamento dos astronautas, notará uma coisa engraçada - nada óbvia de antemão, mesmo se você conhece bem a física e entende o que é a ausência de peso.Um fato empírico: é mais fácil para uma pessoa com gravidade zero lidar com grandes coisas maciças do que com pequenas e leves.As dificuldades começam quando você deixa de lado uma coisa pequena.Parece, qual é o problema?
Bem, basta “colocar” uma coisa no ar, e ela ficará lá. Gravidade zero! Não é mais conveniente do que na terra, onde uma coisa pode cair e, antes que você solte algo, você precisa encontrar algum suporte confiável para colocá-lo?O problema é que uma pessoa não pode "colocar" algo no ar com precisão suficiente. Na terra, estamos acostumados a colocar coisas em superfícies diferentes, mas sempre com gravidade. Ele soltou - e a força da gravidade empurra para a superfície, e a força de atrito não permite se mover de lado. Há uma ilusão de que a própria pessoa possa deixar as coisas em repouso com tanta precisão porque, idealmente, controla seus movimentos e força aplicada.Em gravidade zero, essa ilusão é rapidamente dissipada. Acontece que, se uma pessoa quer "colocar" algo no ar, como ele a colocou na mesa, isso não funciona mais.Mesmo se uma pessoa estiver se esforçando muito para deixar o sujeito imóvel no ar, soltando e retirando a mão com muito cuidado, o sujeito continuará se movendo com uma pequena velocidade residual. E se uma pessoa abandonar uma coisinha pequena como caminhar, sem muita atenção ... À primeira vista, a velocidade de uma coisa não é tão significativa. Mas é constante e não vai a lugar algum. E em apenas alguns segundos, o objeto ultrapassa os limites que o astronauta pode alcançar, simplesmente estendendo a mão. E alguma solução é necessária. Deixe a coisa ir embora, mas você terá que voar por trás dela com todo o corpo, e não apenas mover a mão, ou precisará agarrar a coisa agora e trazê-la de volta. (Por exemplo, preparando um tablet - a atenção não está no rosto do falante, mas nas mãos dele.)É melhor esperar e não largar mais. Mas se você deseja interagir com vários objetos ao mesmo tempo?Você não pode deixar um dos itens pendurado por mais de alguns segundos. Você constantemente precisa voltar a esse assunto e "mudá-lo", flutuando para longe, de volta.E se o item for um tablet, na tela em que você está assistindo algo, e sua câmera fotografar você, o problema é agravado pelo fato de que, além das velocidades residuais, também há uma velocidade de rotação residual. O tablet não apenas flutua lentamente, mas também se afasta lentamente de você.Tudo isso leva ao fato de que os astronautas seguram nas mãos o que estão trabalhando ou se ocupam da limpeza do espaço - constantemente corrigem objetos deixados no ar.Muitos fãs de astronáutica, mesmo depois de assistir a uma boa quantidade de comerciais da ISS, não percebem: quase todos os itens da estação estão com adesivos grudentos. E as peças da mãe Velcro aqui e ali nas “mesas”, “bancadas”, nas paredes da estação, alguns dos módulos são cobertos inteiramente com ela. Além do velcro, existem bolsos de malha de borracha na estação aqui e ali. E algo se apega aos mosquetões. Para laptops e suportes de câmera. Tudo isso com o mesmo objetivo - de alguma forma, resolva o problema da limpeza do espaço.E, nesse sentido, Simon tem uma função útil única: pode ser usada como uma tela que pode ser "colocada" no ar. Em seguida, o próprio Simon manterá a posição e a direção da tela (e câmera) no astronauta. Ele não precisa de cuidados.A questão é: valeu a pena enviar um objeto pesado e volumoso para isso - e não um pequeno drone compacto ao qual você pudesse conectar um tablet?2.5 O principal problema dos drones na ISS Osdrones simplesmente não são necessários na ISS - não há problema para eles.Mais precisamente, tarefas poderiam ser encontradas para eles, mas para resolver esses problemas, os drones não devem ser um brinquedo do tipo "estamos enchendo tudo na moda, mas é bom para alguma coisa", mas aprisionados por uma função específica.3. Drones bonitos do futuroDas tarefas reais para as quais os drones poderiam, em princípio, ser úteis na ISS, agora existem dois:1. Atire no trabalho dos astronautas,2. Salve as pessoas da limpeza do espaço.Se você está procurando uma soluçãoespecificamente para essas tarefas agora - você precisa usar algo que possa funcionar no momento e trabalhar com eficiência, resolvendo completamente os objetivos estabelecidos. E não faça algo arrastado, justificado pelo fato de que “estamos desenvolvendo abordagens para a tecnologia para que algum dia no futuro ...”3.1. Ofertas da RationalAgora e em um futuro próximo, os drones da ISS não devem:- confiar seriamente no início da IA (porque são muito iniciais);- use o reconhecimento de sinal de vídeo para navegação (não depurado até o final e redundante em um ambiente fechado onde tudo é controlado);- sobrecarregar o design com análogos inúteis de dispositivos especializados já disponíveis na ISS com a melhor qualidade (sem câmeras embutidas, sem tablets embutidos, sem processadores além dos controladores mínimos de dispositivos).O drone deve ser apenas a ferramenta de trabalho real - uma unidade gyrodyn, ventiladores, bateria, sem fio e isso é tudo. (O máximo ainda são algumas das menores câmeras de um tipo de smartphone, e somente para que o fluxo de vídeo seja transferido através da imagem para a unidade do processador no rack, o processamento é apenas lá.) Além disso, todos os detalhes são o mínimo possível. Se os drones anteriores tivessem as dimensões de uma espada de basquete, handebol e uma pequena de praia, o drone ideal da ISS deveria ser muito menor, esforçando-se pelo tamanho de uma bola de tênis.Isto é:As capacidades do processador são transferidas para um dos racks científicos para que o drone não carregue essa enorme carga extra (não esqueça que, além do próprio módulo computacional, o drone também é forçado a carregar energia para este módulo!).Para a navegação, use o esquema Sphere original, mas de forma invertida : o próprio drone emite sinais como dois faróis (do lado estibordo e do porto), esses sinais são lidos por detectores fixados nos cantos dos módulos da estação e triangulados por atraso; Juntamente com os dados internos do drone - sensores de aceleração, operação de motores elétricos e anéis girodinâmicos - isso é suficiente para determinar a posição do drone e sua orientação e seus derivados.Ao traçar a rota, é usado um modelo pronto do ambiente (o ISS é um objeto grande, mas bastante visível), marcado com canetas e atualizado, se necessário, pelo operador, sem reproduzir o reconhecimento de padrões de um sinal de vídeo. Para controlar o ambiente, uma imagem é usada com a câmera acoplada (não no drone) no módulo em que o drone está agora - e esse controle é realizado pelo operador. Se algoritmos neurais são usados, é apenas para resolver tarefas auxiliares de baixo nível para as quais eles já são bons o suficiente.O próprio drone processa as informações ao mínimo. Apenas despeja seus dados internos no computador do rack e recebe instruções específicas para a operação do equipamento.Existem pontos de montagem no drone. Heterogêneo. Essas são travas operadas eletricamente (a parte complementar da trava está presa ao objeto que o drone deve usar) e apenas um pedaço de velcro-mãe que é padrão para a estação (em gravidade zero, isso é suficiente para conectar o drone mesmo com um objeto bastante maciço). De qualquer forma, essa montagem deve ser mínima, muito menor que os enormes para-choques redundantes das Esferas.Quando é necessário um vídeo de um astronauta que trabalha, uma câmera de vídeo é presa ao drone - uma câmera / câmera grande em tempo integral, que fica na ISS. O drone está rebocando e girando lentamente quando o MCC precisa mudar o ângulo de observação do local de trabalho do cosmonauta. A manobra necessária é calculada no chão / no computador montado em rack, o drone recebe apenas pedidos elementares para os motores.Para que o astronauta seria realmente um alívio, e não uma dor de cabeça desnecessária, no rack científico onde o espaço é alocado para a unidade processadora do drone, o espaço para sua doca também deve ser alocado - para que o estacionamento e a recarga, como há muito tempo sejam realizados em aspiradores de pó. E é melhor que o drone não esteja sozinho, mas com a capacidade de trabalhar com um carrossel: do ponto de vista do astronauta, o drone parece sempre carregado, apenas ocasionalmente uma cópia aparece ao lado do drone em funcionamento, entre eles há uma transferência (automática) do item rebocado, após o qual o drone gasto é removido para recarregar .Além de trabalhar como cinegrafista, um design semelhante tornará possível o uso do drone para combater o aliciamento.Como uma câmera, um drone pode manter a posição e a orientação de um smartphone / tablet conectado a ele; rebocar essa tela atrás do host; compensar o recuo quando o astronauta cutuca a tela do tablet sem segurá-lo com outro amigo. Ou, durante o trabalho de reparo, "mantenha" uma bolsa de trabalho / pequena "mesa" no ar, com velcro e ímãs para itens pequenos e prendedores, ao lado do astronauta como ele achar conveniente - eliminando a necessidade de endireitar a bolsa emaranhada todas as vezes ou remova o necessário com um mosquetão no cinto e, em seguida, aperte-o, etc.Ou seja, deve ser apenas uma restrição universal no ar para outras coisas. Não é portador de alguns "instrumentos científicos" abstratos, mas daqueles objetos que são realmente e constantemente usados na estação na vida cotidiana.E com o desenvolvimento adicional dessa abordagem:é melhor imaginar nem dois drones trabalhando em turnos com uma coisa perto de um dos astronautas, mas um enxame inteiro deles na estação trabalhando como carrossel. Diversas instâncias estão constantemente localizadas em cada módulo da estação, prontas para atuar sem procedimentos especiais de inicialização. No fundo, eles começam a empurrar, para congelar e não girar, objetos próximos ao astronauta, se esses objetos forem liberados das mãos, mas não estiverem presos à parede com velcro / não forem fixos de outra forma, e a atenção da pessoa será claramente distribuída entre vários desses objetos.3.2 O que vem a seguir - na realidade?A ordem em que os drones apareceram na ISS em miniatura reflete o nível de desenvolvimento tecnológico dos países. O líder faz alguma coisa, depois os outros que são capazes de competir são atraídos: primeiro os EUA, depois, por uma ampla margem, o Japão, a Alemanha ...É claro que a Rússia não deve ser esperada nem nesta corrida em miniatura.Então acontece que agora é a vez dos EUA novamente? Levando em conta sua experiência, observando os esforços dos parceiros, a NASA deve agora levar essa corrida a um novo estágio tecnológico?Aparentemente, algo está realmente planejado lá lentamente. Pelo menos a NASA está conduzindo uma espécie de brainstorming, anunciando concursos públicos em vários hackathons.Infelizmente, as soluções oferecidas em tais competições são estragadas por estereótipos errôneos sobre as condições, problemas e tarefas da ISS. Os conceitos são feitos diligentemente, mas sem pensar, com o princípio de "vamos cegar tudo o que pudermos para um drone e, de repente, será útil para alguma coisa?". Aqui está um exemplo típico .