
O modelo atualizado da câmera RealSense 435, que recebeu o índice i, viu a luz. Sua característica distintiva é o sensor inercial embutido IMU (Inertial Measurement Unit). O nome Intel RealSense não diz nada para você? Então este post é para você. O desenvolvimento dessa tecnologia é descrito com tanto detalhe no blog da empresa que você pode contar sua história sem ir além do Habra. Provavelmente é isso que faremos, porque recentemente o RealSense não diz o que é ouvido - embora isso seja injusto.
 Câmera criativa com suporte ao Intel Perceptual Computing SDK. 2013 ano
Câmera criativa com suporte ao Intel Perceptual Computing SDK. 2013 anoAs tecnologias de imagem 3D foram desenvolvidas na Intel desde o início dos anos 2000. O nome RealSense
apareceu em 2014 , substituindo o
Perceptual Computing usado anteriormente; Depois
veio o Intel RealSense SDK e uma câmera protótipo. O princípio de operação das câmeras 3D consiste na formação simultânea de dois tipos de imagens: um quadro RGB comum e um mapa de profundidade obtido usando emissores e sensores infravermelhos. Uma imagem enriquecida com dados de profundidade pode ser usada para manipular e analisar objetos representados (por exemplo, segmentar o plano de fundo ou mover o ponto de foco), bem como uma interface natural para controlar sistemas de computadores humanos usando expressões faciais, movimentos de mãos e dedos, gestos.
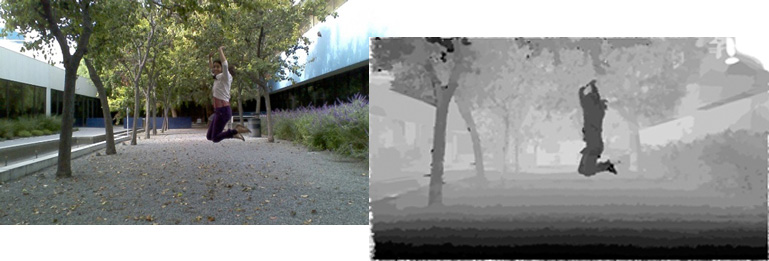 Foto RGB e mapa de profundidade para ele
Foto RGB e mapa de profundidade para eleNos próximos 2 anos, a Intel promoveu ativamente o RealSense em todas as frentes. Foram realizados
concursos regulares para
desenvolvedores , numerosos
materiais de treinamento e referência . Em 2015, duas câmeras seriais RealSense foram lançadas: a
frontal F200 e a traseira R200 . Nesse caso, eu até fiz um exame pessoal: nas férias de Ano Novo em 2016, tive a oportunidade de
testar as duas câmeras em casa . Havia planos de implementar o RealSense em laptops,
smartphones e
outros computadores , mas subseqüentemente tudo foi limitado às câmeras para o PC.
 Câmera Intel RealSense SR300. 2016 ano
Câmera Intel RealSense SR300. 2016 anoO tempo passou, o software foi aprimorado, novas câmeras surgiram primeiro da
segunda e depois da
terceira geração. Cada vez que
novas melhorias eram introduzidas : aumentava a precisão da determinação da profundidade, a facilidade de uso, novas funções de reconhecimento. A Intel continuou a
interagir com os desenvolvedores e a receber feedback deles. No blog, publicamos ativamente traduções de artigos em idioma russo no
RealSense SDK - essa foi uma das poucas fontes de informações sobre o RealSense em russo. O que, de fato, é verdadeiro até hoje.
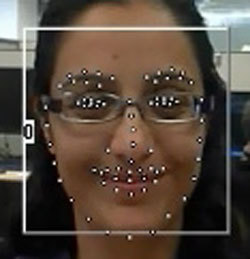 O Intel RealSense SDK 1.0 permitiu rastrear até 76 pontos principais de um rosto; em versões futuras, o número de pontos aumentou
O Intel RealSense SDK 1.0 permitiu rastrear até 76 pontos principais de um rosto; em versões futuras, o número de pontos aumentouAtualmente, a família de câmeras Intel RealSense D400 lançada no início deste ano é relevante. A família consiste em duas câmeras: D415 e D435. O D415 fornece uma imagem mais clara, mas possui uma velocidade mais baixa e uma distância mínima mais distante. A D435 é mais adequada para aplicações de AR / VR porque seu obturador global funciona melhor com objetos em movimento rápido. Características mais detalhadas das câmeras são fornecidas na tabela.
| D415 | D435 |
|---|
| Aplicação | Indoor / Outdoor |
| Determinação da profundidade | Feixe IR duplo |
| Tipo de obturador | Deslizamento | Global |
| Tamanho do pixel | 1,4 x 1,4 μm | 3 x 3 mícrons |
| Tamanho do campo de profundidade | 63,4 ° x 40,4 ° | 85,2 ° x 58 ° |
| Resolução do campo de profundidade | 1280 x 720 |
| Opções de fluxo RGB | 1080p a 30 fps |
| Intervalo de profundidade | 0,16 - 10 m | 0,11 - 10 m |
| Tamanho da câmera (L x P x A) | 99 x 20 x 23 mm | 90 x 25 x 25 mm |
Agora a câmera D435 passou por modernização - como já mencionado, um sensor de movimento IMU inercial de 6 eixos foi adicionado a ela. Apesar da pequenez das mudanças, elas não podem ser consideradas sem importância de forma alguma, porque abrem um novo campo de aplicação. Se anteriormente a câmera era normalmente considerada um objeto estático, agora os dados de posição e movimento são adicionados à imagem 3D - valiosos em si e, além disso, aumentando a precisão da determinação da profundidade. O RealSense se tornou mais fácil e conveniente de usar em objetos em movimento, como drones ou robôs. E os dispositivos móveis inteligentes, por sua vez, receberam um "terceiro olho", que permite implementar uma funcionalidade fundamentalmente nova. Além disso, o IMU trabalha com a estrutura
ROS (Robot Operating System) e, portanto, pode ser usado com todas as plataformas de robôs compatíveis com o ROS.
O Intel RealSense D435i já está em
pré-venda , os embarques começarão em 3 de dezembro, o preço atual é de US $ 199.