Em 2017, uma história muito interessante foi ouvida na mídia sobre uma startup que robôs ordenha vacas em fazendas leiteiras industriais. A empresa se chama R-SEPT e recebeu 10 milhões de rublos de investimentos. Mas um ano se passou e não há notícias sobre o que aconteceu a seguir. Entramos em contato com Alexei Hahunov, o fundador da startup, e conversamos sobre desenvolvimento. Acontece que durante todo o ano sua equipe lembrou o protótipo do robô e, há apenas uma semana, realizou os primeiros testes de campo na fazenda.
Sob o corte, está a história de como um estudante de robótica que cresceu em uma fazenda-mãe transformou um diploma universitário em uma startup industrial, reuniu seus primeiros manipuladores com amigos e depois passou para o nível dos programas estaduais de robótica agrícola. Bem e mais importante - que o braço de ferro de uma visão de robô e máquina é melhor do que uma leiteira viva.
 Alexey Hakhunov
Alexey HakhunovNesta semana, colocamos o robô na fazenda e ordenhamos a primeira vaca para eles. Tudo foi muito divertido. Nossa família tem uma empresa de laticínios onde trabalhei antes. Está localizado no distrito de Sergiev Posad, a vila de Kuzmino. Temos mil e quinhentas vacas lá. Esta é uma grande empresa.
Eu fui educado em robótica. Naturalmente, coceira nas mãos para usar o conhecimento teórico em batalha. Eu olhei para a situação com a robótica no campo da pecuária leiteira e cheguei a uma conclusão interessante. Todos os robôs existentes - e agora existem três principais fabricantes - foram criados na Europa, e os mercados da América ou da Rússia são muito diferentes. Pequenas fazendas familiares com até 200 vacas são comuns na Europa. Na Rússia, China e América, eles são muito grandes. Temos uma empresa onde existem cerca de 50 mil vacas. Ao mesmo tempo, na Europa, 40% das fazendas são robóticas e, em outros mercados, a robotização não excede um por cento. E o problema é que os robôs que foram feitos para pequenas fazendas não foram adaptados às realidades das grandes.
Na Europa, o agricultor se ordenha, alimenta e faz tudo. A vaca deve ser ordenhada pela primeira vez às cinco ou seis da manhã. Este é um processo complexo - realmente complexo. Para aliviar a dor do agricultor, eles criaram um robô que ajuda a lidar com isso, mas não oferece benefícios econômicos. É necessário apenas para facilitar o processo para o agricultor. E grandes empresas são necessárias para obter lucro. O custo do robô, a produtividade, a manutenção e outras coisas devem atender a um grande número de padrões da indústria.
Quase todos os robôs existentes criaram veterinários. Eles sabiam muito bem como trabalhar com uma vaca, mas muitos de seus projetos não eram perfeitos, redundantes e tinham muitas falhas óbvias.
Decidimos criar um robô de design industrial, que custará menos do que os existentes, mas terá a mais recente tecnologia do campo da robótica e levará em consideração toda a experiência com uma vaca. Há um objetivo - ele ainda precisa ser realizado.
Robô de ordenha

De acordo com as práticas modernas nas fazendas, as vacas não têm um local fixo - apenas cem ou duzentas andam pelo quintal, podem ficar em qualquer barraca e comer a qualquer momento. Um robô é colocado no mesmo ciclo e a vaca chega lá sozinha.
A dieta de uma vaca consiste em um número muito grande de componentes. Mas a coisa mais agradável para ela é ração composta. É como um doce para uma pessoa. Para levar uma vaca a um robô, eles não dão comida para ela em horários normais, mas dão apenas em um robô, e ela vem lá para se deliciar. Até fazermos isso, não havia motivação normal para ordenhar vacas. Eles experimentaram estresse com isso.
Um robô é essencialmente uma única barraca fechada. Tem duas portas. Um abre quando a vaca sai, o outro lança a próxima e fecha.

Há um mito que as pessoas gostam de contar: supostamente uma vaca adora ser ordenhada por leiteiras. Para ser acariciada, amada, e só então ela dará muito leite. De fato, isso é besteira absoluta. A única coisa que uma vaca ama é a falta de estresse e a repetibilidade absoluta. Se uma vaca é alimentada com a mesma dieta todos os dias, ordenhada igualmente ao mesmo tempo, dada a mesma quantidade de água e de preferência mantida na mesma temperatura, e não há barulho alto ao redor - então a vaca fornecerá a quantidade máxima de leite, porque é confortável. Assim que qualquer fator externo aparecer, haverá menos leite. O truque dos robôs é que eles executam todas as operações absolutamente idênticas de tempos em tempos.
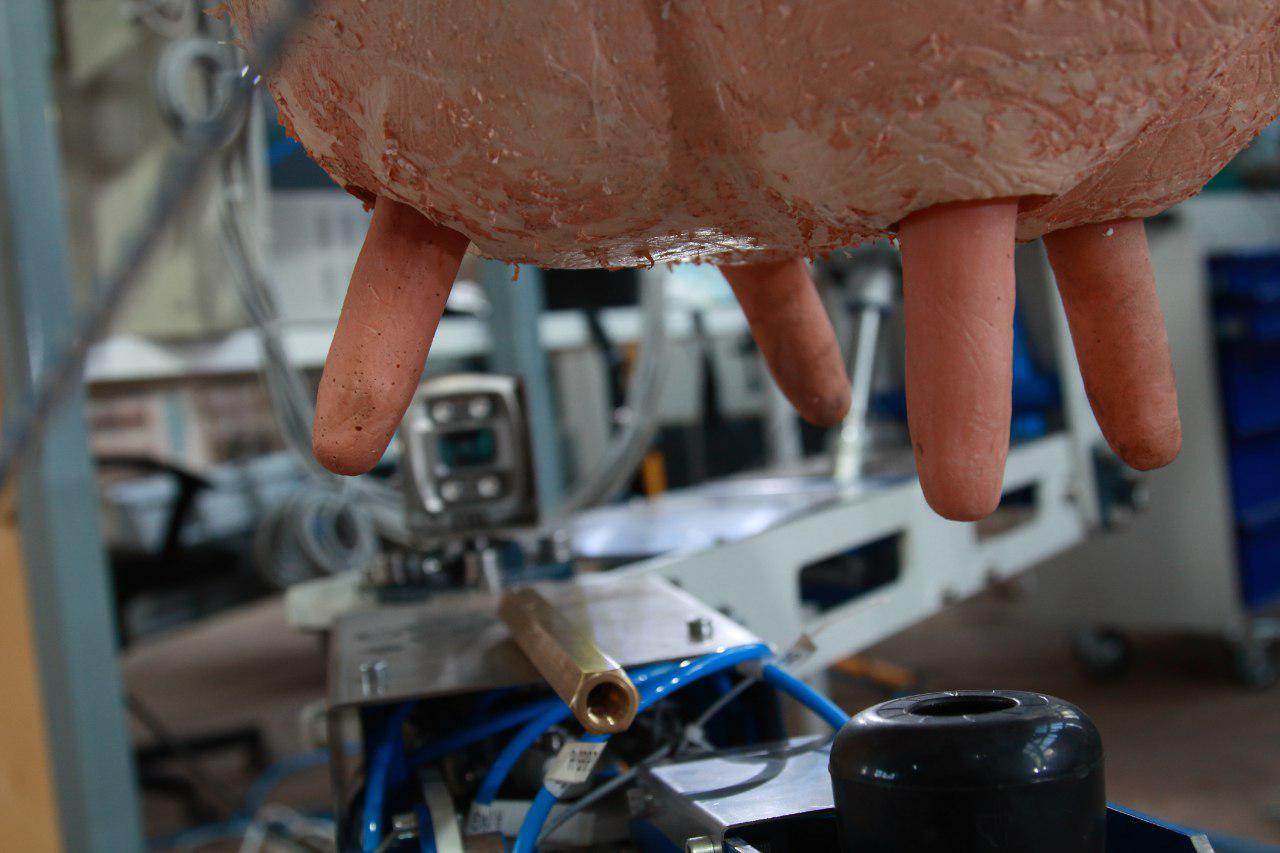
A vaca entra, ela recebe comida. Um braço manipulador é colocado sob a vaca. Há um copo de ordenha. Primeiro é limpo, depois os primeiros filetes são ordenhados para que a vaca inicie o processo hormonal de entrega do leite. Esses gotejamentos são analisados - se a vaca tem alguma doença, se está tudo em ordem com ela. Após meio minuto, o próprio processo de ordenha começa.
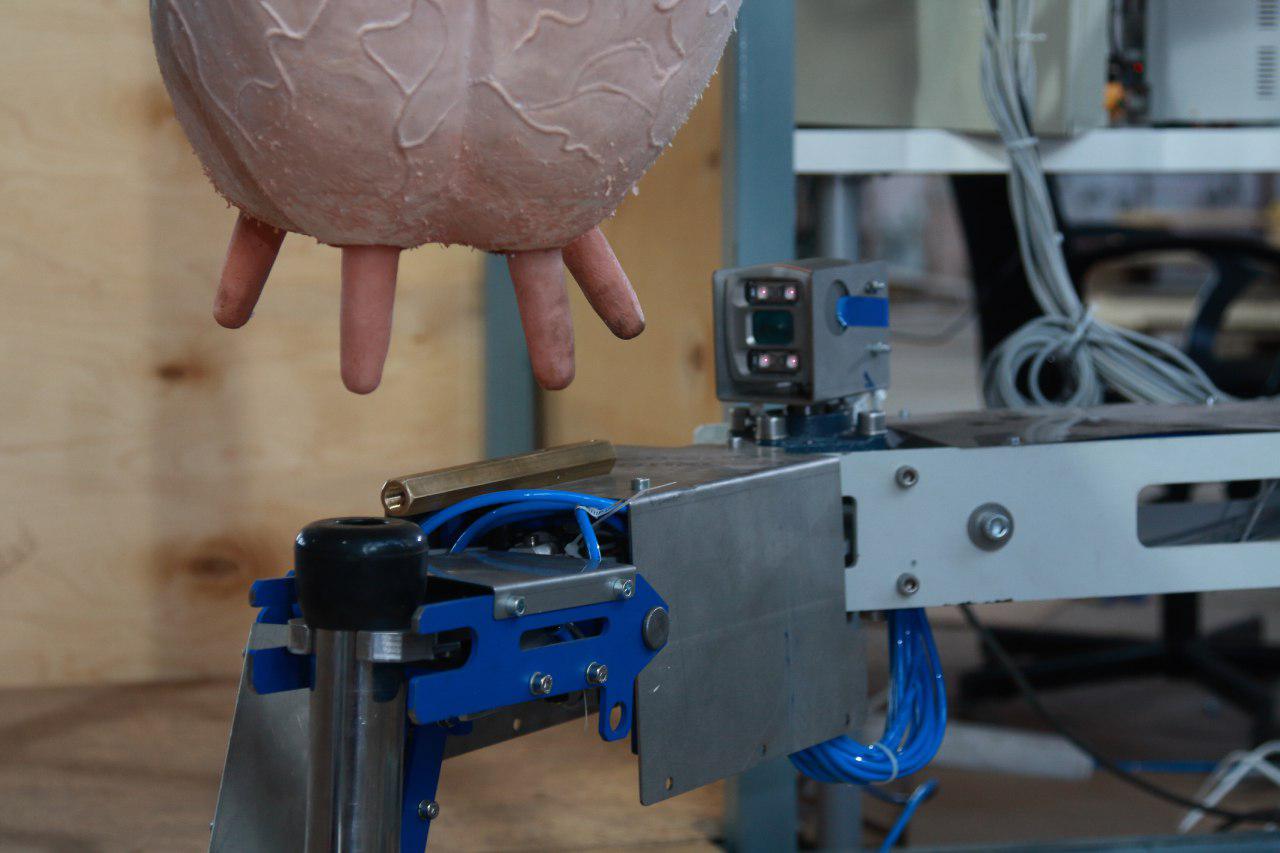
A mão pega as xícaras, leva-as aos mamilos do úbere. No interior, há um monitor de freqüência cardíaca, que com uma certa frequência liga e desliga a pressão negativa. E o leite começa a sugar.
Existe um sensor que verifica a ocupação. Quando o suprimento de leite cai, a vaca é ordenhada. O copo de ordenha é desligado e uma solução especial é aplicada ao úbere, que "fecha" o úbere. Após a ordenha, as vacas têm um canal de leite aberto e é impossível que a infecção chegue lá. A solução com iodo o preserva, por assim dizer.
Ninguém controla o robô, ele vive sua vida. Ele sabe onde estão os óculos - eles estão sempre em um só lugar. Em seguida é a visão por computador. O robô possui uma câmera que recebe uma imagem tridimensional com alta frequência. O algoritmo está olhando na figura onde estão os mamilos.
Todas as imagens em escala de cinza são incolores, apenas um espectro de preto a branco. A câmera 30 vezes por segundo tira o que está acontecendo ao seu redor com uma resolução bastante baixa - 420 a 340. No primeiro estágio, apenas plantamos pessoas que marcavam onde os mamilos do úbere estão na imagem. Primeiro, eles segmentaram onde todo o mamilo está localizado e, em seguida, onde estão localizados os pontos mais baixos extremos.
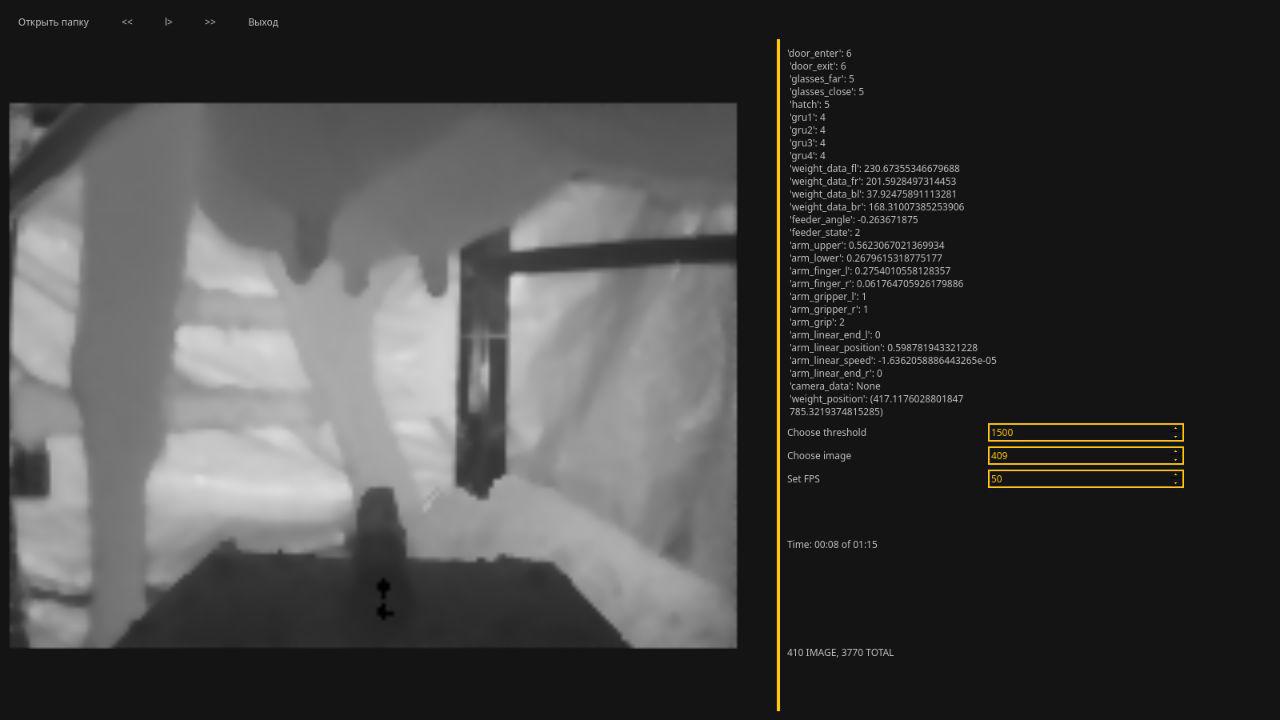
Eu tive que coletar muitos dados - filmamos vários milhares de vacas. No início, as redes convolucionais eram usadas para imagens volumétricas, mas é muito difícil aprender com elas - é necessária uma enorme quantidade de dados. Portanto, eles foram transferidos para a detecção padrão em uma imagem plana, o PyTorch foi tomado como uma estrutura.

Histórico de desenvolvimento
Meus pais eram veterinários e, durante muito tempo, trabalharam em uma fazenda coletiva. Primeiro, meu pai foi oferecido para se tornar vice-diretor da empresa e, em seguida, chefiar a empresa no bairro, desenvolvê-la. Temos uma piada em nossa família de que o agricultor coletivo não é uma profissão, mas um estado de espírito. De março a outubro, o trabalho começa às cinco da manhã e só termina às nove da noite. É muito difícil Algo acontece o tempo todo.
A agricultura é uma indústria ambígua, e para não dizer que é fortemente monetária. Eu não me via como um fazendeiro. Quando meu irmão e eu fomos a várias empresas na Europa e analisamos robôs, fiquei surpreso com a história deles sobre gerações. Foi especialmente engraçado quando eles disseram: “Eu administro essa empresa há 13 anos depois do meu pai. Estamos crescendo bem. Tínhamos 60 vacas - e elas se tornaram 70. Estamos desenvolvendo! ” Quando meu pai assumiu a empresa nos dois milésimos, havia cem vacas. Agora existem mil e meio, e todos duvidam se isso é crescimento suficiente.
Estudei em um dos principais estudantes de educação física da região de Moscou, no distrito de Sergiev Posad, e definitivamente tive que me tornar um técnico. Eu realmente gostei de programação. As principais linguagens da física e da matemática eram Pascal e Delphi, e eu conhecia um pouco de C ++. Agora eu não entendo como, mas conseguimos fazer muitas coisas interessantes em Pascal. Na nona série, a professora nos disse: "Proíbo que você jogue na sala de aula apenas se você não os escrever". E escrevemos alguns em um ano. Primeiro eles fizeram a cobra, depois os tanques, e podiam ser jogados na rede.
Para entrar na universidade, escrevi várias olimpíadas: MIPT, Baumanka. Eu poderia fazer em qualquer lugar, eu só podia escolher. Abri as listas de todas as especialidades que existem nas universidades, li e fiquei incrivelmente entediado. Eu não queria fazer algumas coisas fundamentais, queria algo mais focado na prática. A escolha recaiu gradualmente em Baumanka, em vez do MIPT ou da Universidade Estadual de Moscou.
A robótica parecia a combinação perfeita - você cria algo físico, mas pode escrever um código e ver como ele existe no mundo real. Infelizmente, temos uma educação robótica bastante fraca. Não funciona no nível do sistema. Quando você recebe uma lista de referências, nem um único livro data do século 21, ele se desmotiva fortemente. Fomos ensinados a projetar, resolver problemas em termos térmicos e comprometedores. E a robótica real tinha que ser ensinada por nós mesmos.
Quando fizemos nossos diplomas, decidi que escrever comum é chato e preciso escolher algo que possa ser usado posteriormente. Nesse momento do ano passado, iniciamos nosso projeto. Após a defesa, eles até reuniram uma pequena equipe de amigos. Alguém estava envolvido em circuitos, alguém estava programando. Reunimos várias especialidades e começamos a fazer a primeira versão.

Inspirados pelas idéias dos livros, eles decidiram que era necessário alugar uma casa em algum lugar fora de Moscou e morar e trabalhar lá o verão inteiro. Foi uma péssima ideia! Seis caras que moram em um só lugar realmente não seguem o que está acontecendo, mas realmente trabalham duro.
Era um viveiro ... tudo em uma fileira. Lembro-me de um momento engraçado em que o vape estava ganhando popularidade. Você abre uma sala onde dois desenvolvedores estão sentados, e nada é visível lá, apenas nada! Entre e pense, mas há alguém aqui?
Neste verão, fizemos os primeiros esboços do manipulador. Alguns primeiros detalhes foram produzidos - acabamos de coletar os desenhos e encomendá-los no local de produção. É claro que cometemos um milhão de erros - antes de termos designers muito inexperientes. Agora, eles encontraram um especialista em robótica elegante e começaram a mudar de um grupo de iniciativa de garagem para uma empresa cujo produto atende aos padrões da indústria e aos requisitos modernos de robótica.

Dentro do projeto, até fazemos coisas de nível muito baixo por conta própria, porque tudo tem suas próprias especificidades e os produtos existentes não nos agradam. Para ordenhar uma vaca, não podemos usar os manipuladores industriais de 6 graus padrão existentes. Eles são redundantes para o nosso design e muito caros. Agora temos quatro graus de liberdade. E é dez vezes mais barato que qualquer manipulador industrial.
Escrevemos todos os circuitos com programação de baixo nível, todos os microprocessadores, todas as peças de design e software por conta própria. Nós mesmos não produzimos, a menos que sensores, motores e outras coisas semelhantes.
Robôs de alimentação, carrosséis e rações de aprendizado de máquina
Quando começamos a mergulhar mais, percebemos que com um único robô de ordenha não é possível fechar todas as necessidades da fazenda. Portanto, mais dois produtos foram adicionados.
Empurrador
Quando as vacas são colocadas na fazenda, elas comem através do proprietário - elas apontam a cabeça para a frente - para onde elas têm a ração. Mas em sua fisiologia, eles constantemente o empurram para trás e para de consegui-lo, porque o responsável restringe seu movimento. Acontece que eles têm um metro de ração - comem de 30 a 40 cm e outros 60 fora de alcance.
Normalmente, uma pessoa caminha com uma pá de neve e move tudo para trás. Mas uma pessoa tem a capacidade de esquecer, ser preguiçoso, fazer mal. A vaca neste momento começa a comer menos - isso é ruim. Para isso, eles criaram esse tipo de robô.
Mas, novamente, a maioria foi criada na Europa. Lá, eles são projetados para trabalhar em apenas um quintal ou na mesma sala. Nas grandes empresas, existem muitos quintais, geralmente três a cinco grandes fazendas nas proximidades, de maneiras diferentes combinadas. O empurrador de alimentação, como um aspirador de pó, viaja ao longo de seu caminho e retorna à estação de carregamento.

Para que isso seja rentável, um robô deve atender a vários metros. Pensar e introduzir alimentadores especiais também é caro e difícil. Em primeiro lugar, a conversão de fazendas é cara, pois terá que fazer grandes reparos. Em segundo lugar, nos quintais é necessário muito espaço livre - pelo menos para a passagem do trator. Portanto, um robô é uma solução simples e perfeita.
Robotização de carrossel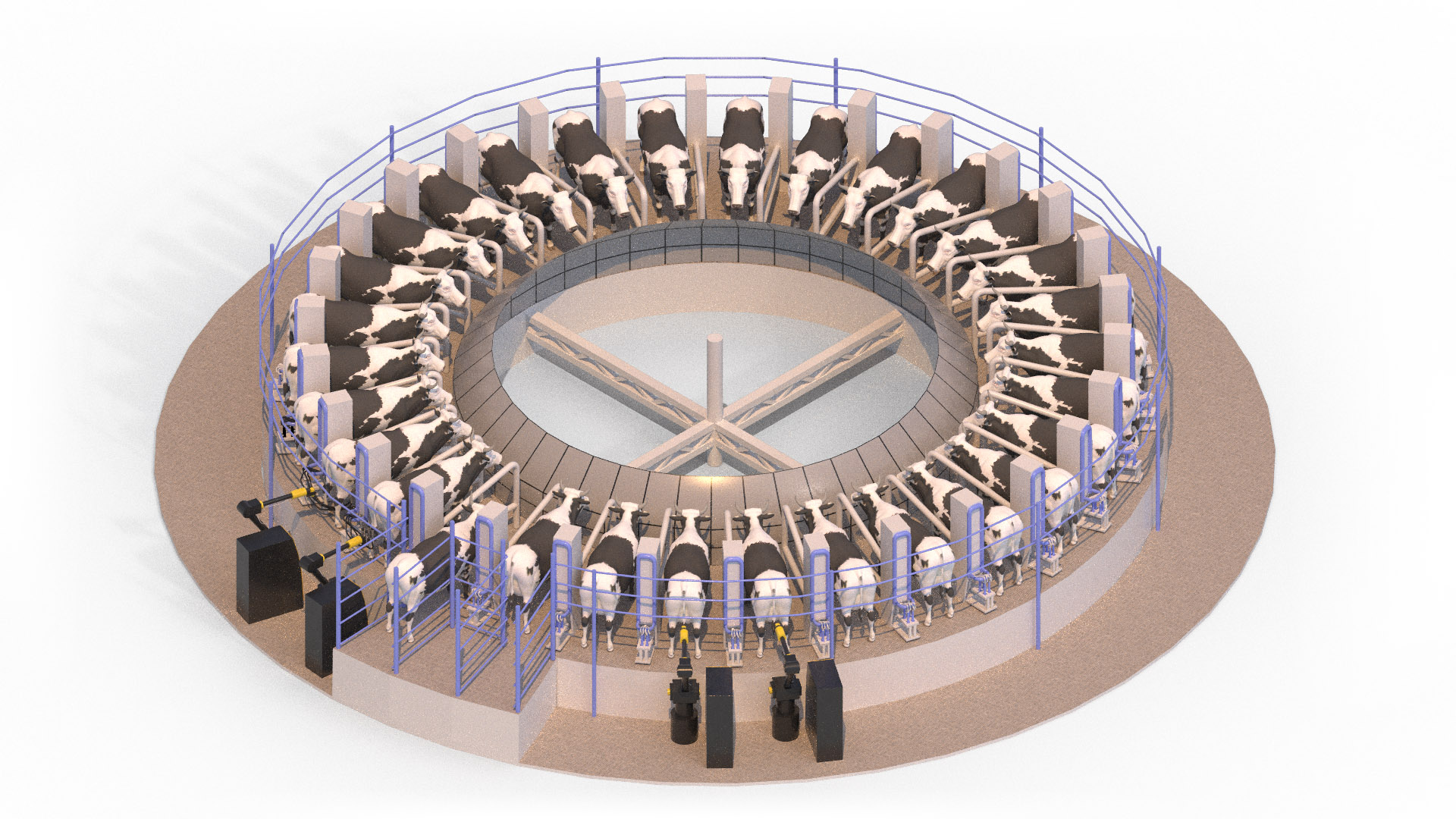
Existem salas de ordenha especiais, geralmente chamadas de carrosséis. Este é um grande rotador, onde ficam de vinte a quarenta vacas. Gira lentamente, e há operadores em um círculo. Primeiro, eles limpam o úbere, colocam e removem o aparelho. Mas eles fazem isso bem devagar e o carrossel geralmente fica ocioso.
Agora é impossível substituir completamente esses carrosséis por robóticos - é muito caro. Fabricamos manipuladores que podem ser instalados em qualquer tipo de carrossel, e isso o acelerará bastante - em trinta por cento. Já com essa aceleração, o número de animais e o número de vacas na fazenda podem ser bastante aumentados.
Estudo da dieta
Agora eles estão tentando alimentar as vacas de acordo com a teoria do equilíbrio. Cada vaca por litro de leite precisa de uma certa quantidade de nutrientes, quilojoules de energia, proteínas e gorduras. Mas absolutamente não levamos em conta as características de cada vaca. É o mesmo que alimentar cada pessoa como um homem de meia idade com oitenta metros de altura, como se todos tivessem o mesmo metabolismo.
Estamos criando um sistema que analisa como a vaca reagiu a diferentes componentes, quanto leite foi administrado e qual a qualidade. Com base nisso, coletamos a dieta correta atual para todos os componentes.
Simplesmente tomamos a quantidade máxima de informações sobre como as vacas foram alimentadas antes, quais valores de energia cada componente tinha. Tentamos construir uma dieta não para obter o máximo rendimento de leite, mas para obter a máxima rentabilidade da empresa. Cada componente tem seu próprio custo, além de sabermos quanto custa um litro e queremos encontrar um equilíbrio quando uma vaca der muito leite, mas seu custo é bastante baixo.
Uma vaca dá até 13 mil litros por ano. Mas com esse leite, um litro custa, por exemplo, 25 rublos. Se você calcula uma ração para oito mil e quinhentos litros, o preço de custo pode ser de cerca de 12 rublos e a marginalidade é significativamente maior do que na versão com maximização da produção de leite. É necessário um modelo para encontrar um equilíbrio.
Mas existem limitações nos testes que são fáceis de ignorar. As vacas não podem ser removidas e os componentes adicionados rapidamente, porque produzem enzimas no estômago responsáveis pela quebra, por exemplo, do trigo. E novos componentes não serão digeridos no início se você os apresentar abruptamente. Nos humanos, a propósito, funciona da mesma maneira. Quando comemos a mesma comida, a digerimos muito bem.
Investimentos e atitude do governo
Naquela época, eu tinha meus próprios fundos. Primeiro vivemos neles. Foram tempos muito sombrios. Às vezes era impossível pagar salários. Um cara tinha um empréstimo para um carro e, no começo do mês, joguei 12 mil em um cartão para pagar o banco. Então acabou por atrair dinheiro, nos tornamos finalistas da Vila Statrtup em Skolkovo, ficou mais fácil.
Ao mesmo tempo, nos tornamos residentes em Skolkovo, porque tentei pagar um salário branco. Skolkovo deu preferências fiscais para isso, e esperávamos obter doações. Mas há um tipo de lacuna. Para receber uma subvenção para o primeiro produto em Skolkovo, o produto já deve ter dinheiro. Como superar isso quando não há dinheiro e há um desejo de fazer é incompreensível.
Agora, acho que ainda temos pelo menos seis meses até o momento em que começamos a vender robôs, e tudo isso se transformará em um negócio em funcionamento. O termo está ligado às especificidades do trabalho com ferro. Tem um longo ciclo de produção, testes, certificação. Mas agora estamos bem cientes de todas as maiores explorações agrícolas, de todos os chefes dessas explorações agrícolas e estamos em contato com todos. Espero que problemas sérios não surjam mais.
Claro que todo mundo tem conservadorismo. Mas aqui é necessário não contar, mas mostrar. Portanto, estamos fazendo o primeiro pátio em nossa casa, para que você possa pegar pela mão e mostrar que é um robô, é assim que ordenha, é sua economia.
Acreditamos que existem muitos pré-requisitos para lidar com nosso projeto. O primeiro é o apoio do governo. Os robôs são subsidiados, têm arrendamentos, várias preferências fiscais. O estado apóia a transição para a robótica agrícola. Existem programas em que o estado faz quase tudo para que você possa comprar e instalar robôs para si mesmo.
O problema é que as pessoas não querem morar em uma vila. A vila não é perfeita como local de vida, é impossível construir uma infraestrutura normal lá. A robotização é a saída.
Obviamente, quando a empresa possui 20 robôs, também há especialistas que os atenderão. A robotização não limpa trabalhos, aumenta a eficiência da empresa. Geralmente, no lugar dos funcionários envolvidos na ordenha, outros aparecem - aqueles que interagem com os robôs. Selecionamos várias boas faculdades agrícolas nas quais queremos abrir departamentos onde eles ensinarão as pessoas a usar robôs. Ou seja, juntamente com a venda de robôs, daremos trabalho às pessoas.
Meus pais são os maiores céticos de todos e o maior apoio ao mesmo tempo. , , , — , . . , , , . . , .