Uma pequena aventura de dois joysticks. A história de como reparar o Rhino Throttle Controller X55 (X56) com custo mínimo. Leia com cautela! Contém uma atitude inaceitável em relação aos circuitos e as regras para a comutação de dispositivos eletrônicos.
Disclaimer! Fazendo como eu não fiz direito, de uma maneira boa, você precisa fazer uma substituição de componente ou, pelo menos, colocar diodos TVS!
Eu tenho dois joysticks - kits Rhino X55 (X56) e os dois têm um controlador de aceleração. O primeiro travou quase um ano após a compra, e o segundo apareceu - eles enviaram um novo modelo X56 mais recente sob garantia. Mas a felicidade não demorou muito, seu controlador de aceleração também deixou de ser determinado depois de um tempo.
Nós a abandonamos, porque não havia tempo para mexer com a garantia, e na segunda metade - o próprio joystick funcionou bem.
E aqui, há uma semana, o filho teve o cuidado de substituir este na garantia, porque Saitek se mudou para a Logitech, por que não tentar?
Mas não funcionou, a garantia já expirou no segundo joystick.
Bem, desde que essa bebida começou, não há mais nada a perder e eu descobri o osciloscópio.
O método é simples: cutucamos um osciloscópio em todos os lugares e vemos o que acontece.
Antes de tudo, descobri que o controlador não acessa o chip SPI FLSAH separado (W25X40L) e deve ler o identificador do dispositivo USB a partir daí. Além disso, observei o joystick de trabalho e ele acabou sendo exatamente o mesmo chip controlador CY7C64215-56LTXC e, em geral, ficou claro o que e como deveria funcionar.
Tornou-se mais interessante quando notei que o chip do joystick de trabalho é alimentado por 5V por meio de um conversor DC-DC up / down da entrada de 5V do USB. Bem, ficou claro que eles estabilizam a energia, mas na saída de 5V. Mas as "vítimas de incêndio" alimentaram 3,3V através de um estabilizador abaixador. Apesar do fato de que o chip de potência é universal e pode operar entre 3.3V e 5.2V. "Hmmm", pensei, talvez ele tenha pouco poder? Mas dar 5V não ajudou.
A segunda diferença estava em um pequeno chip buffer que transferia sinais de dados do nível USB 5V para 3.3V. E quando comparei os sinais nas entradas do controlador, vi que os sinais do computador estão em níveis insuficientes (veja as fotos).
Realmente conserte.
Bem, considerando que em um joystick de 5V, os sinais de dados USB vão diretamente para o controlador e existem apenas diodos de derivação lá, desenraizei esse conversor de nível e inseri as linhas de dados USB diretamente no controlador. E um milagre aconteceu! Ele ganhou!
Então agora eu tenho dois conjuntos de joystick de trabalho Rhino X55 e Rhino X56.
Imagens com legendas - explicação.
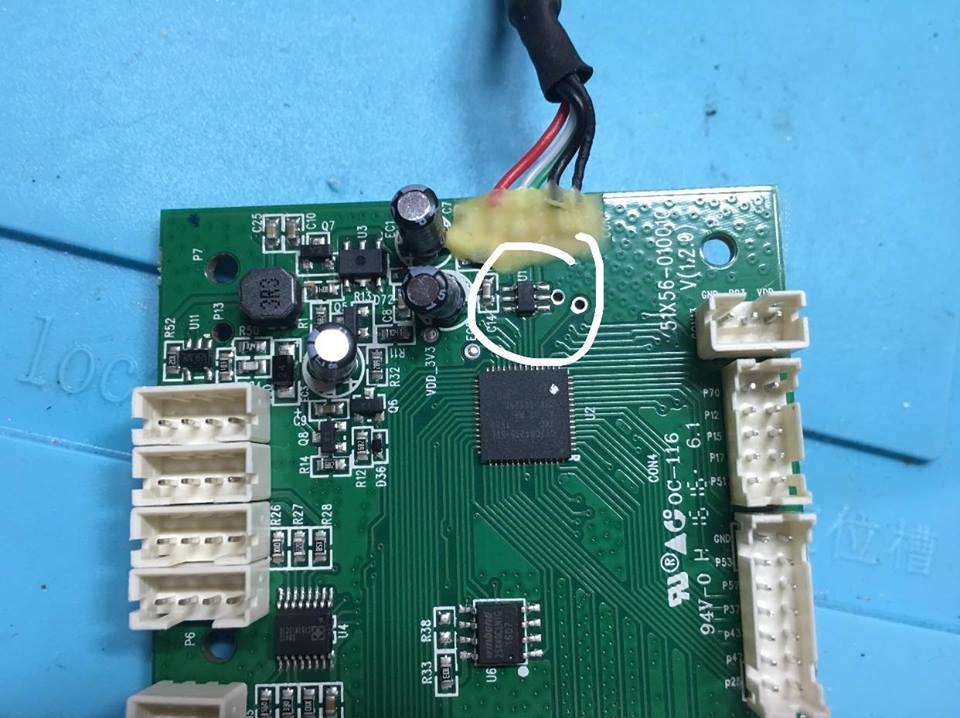
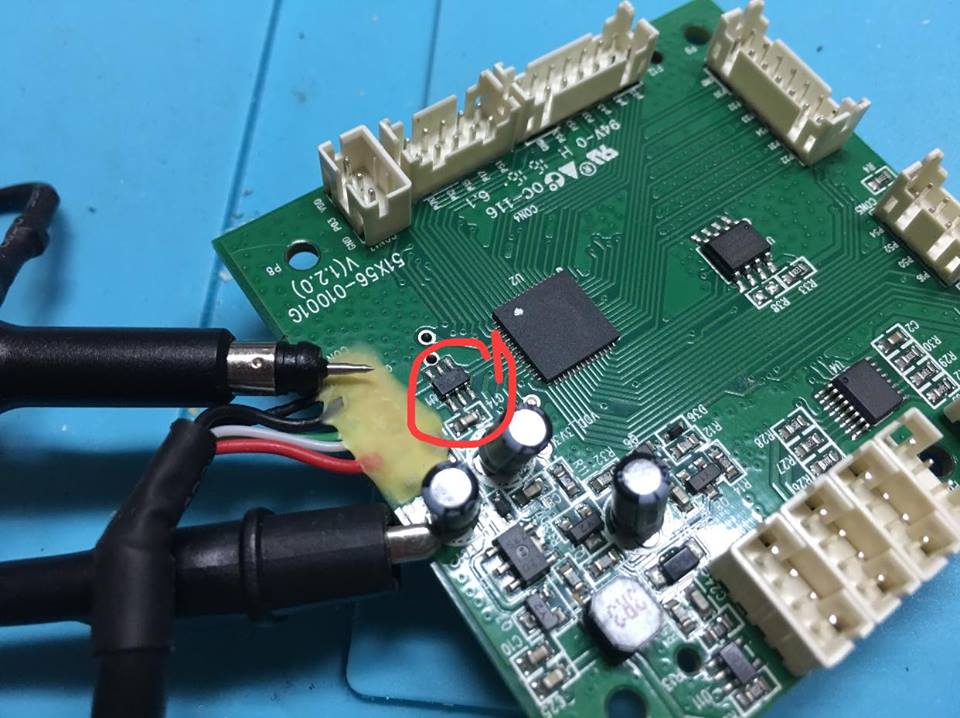
Este é o paciente antes da cirurgia.

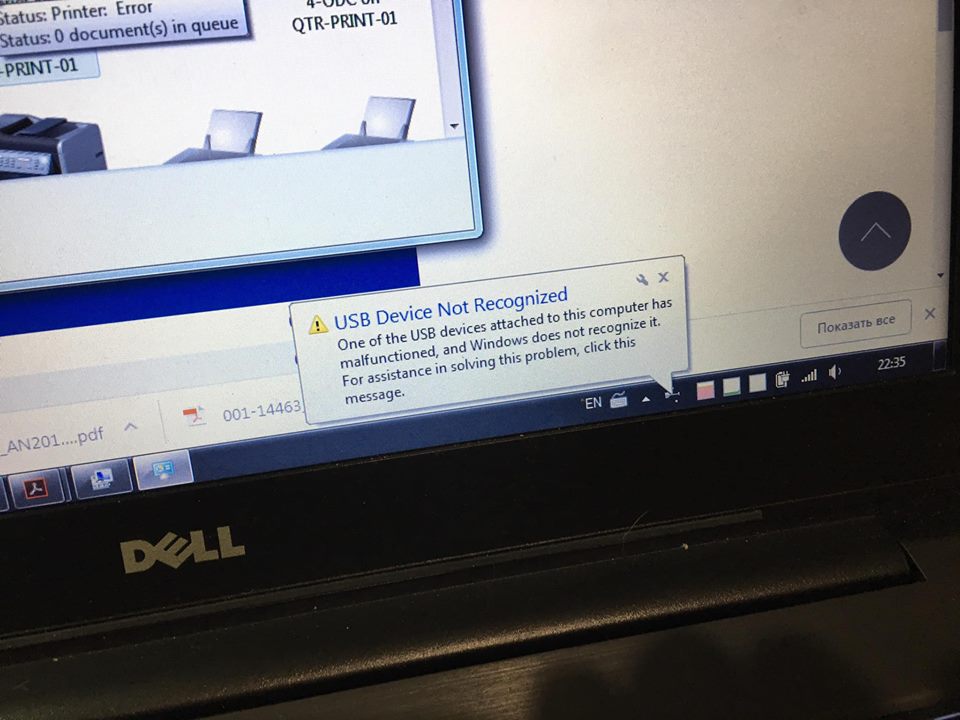
Então não funciona
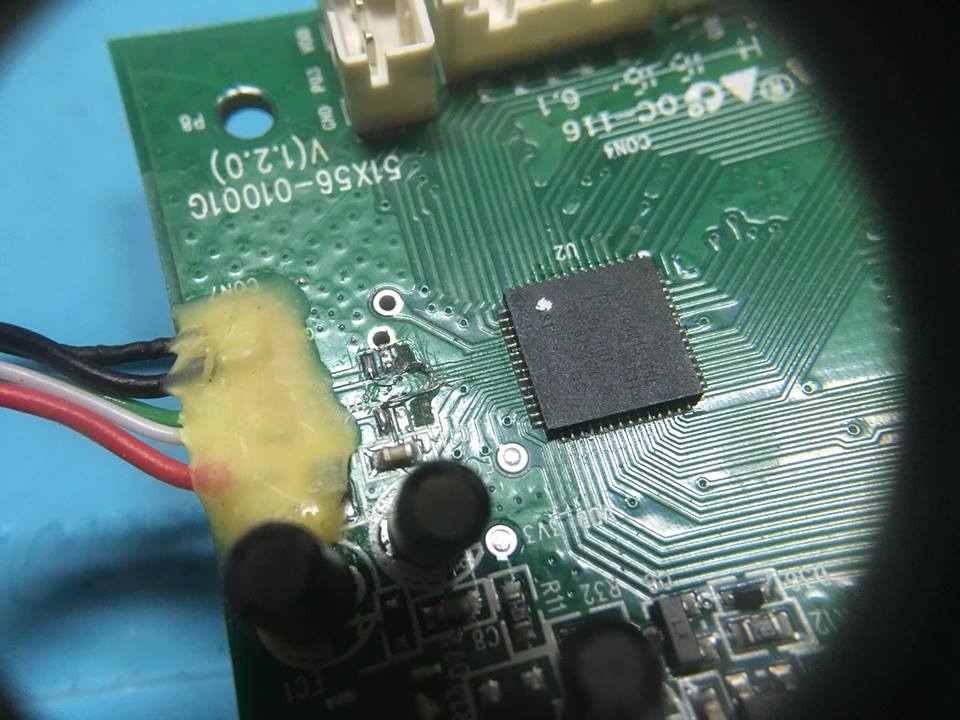
Isso é circundado por um buffer maligno. Embaixo está o chip CY7C64215-56LTXC real, e ainda mais baixo é o SPI FLASH W25X40L
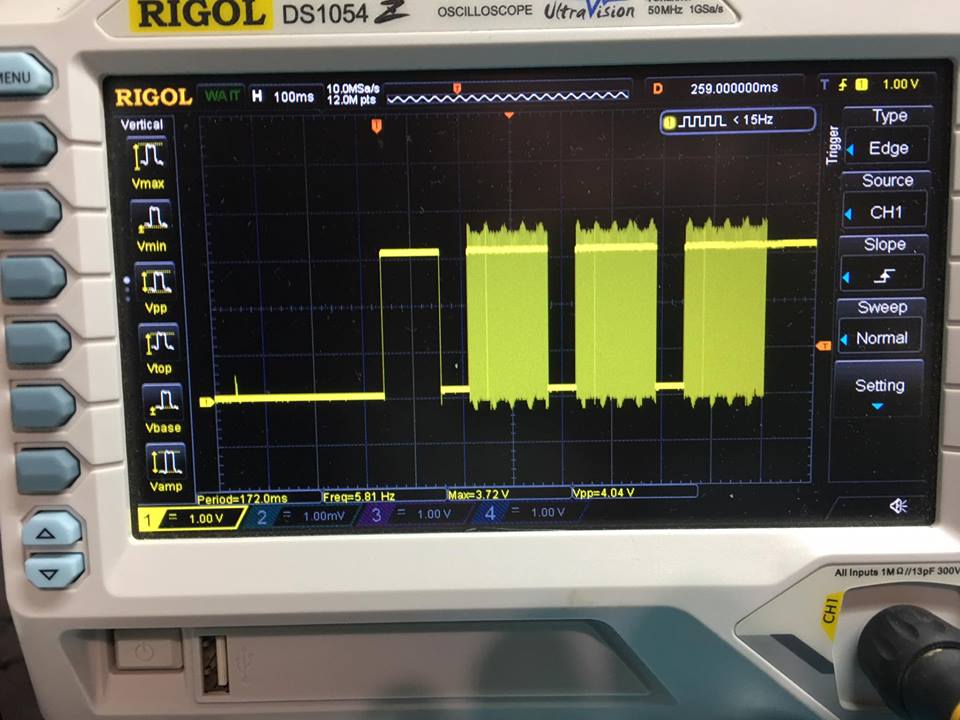
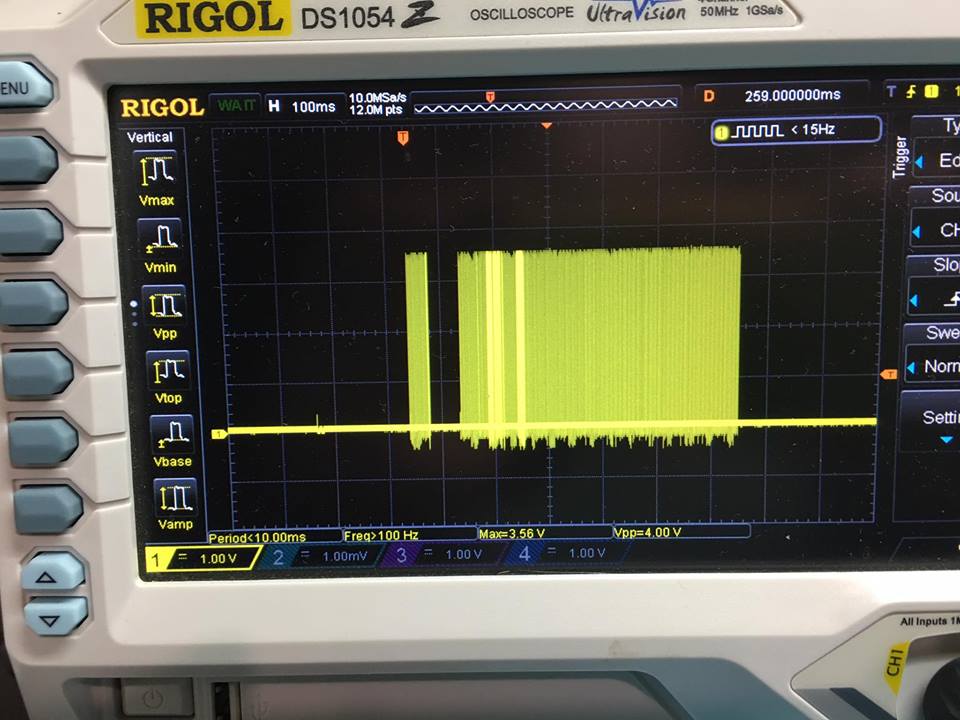
Este é um sinal USB do computador para o buffer. Preste atenção ao nível: 3.5V
Esse sinal também é do lado do computador, mas é uma saída do buffer para o computador

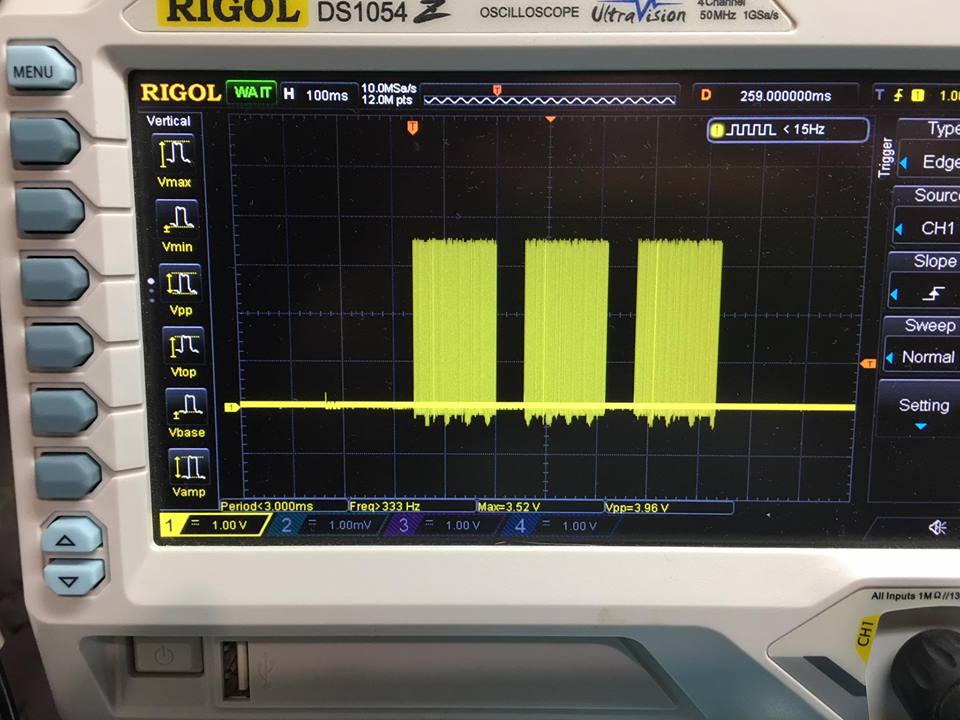
“E aqui está ele! Dente doente! ”(C) é o sinal após o buffer do controlador. Como você pode ver, o nível mal chega a 2,5V, então o controlador não reconhece unidades lógicas ...

Este é o sinal do controlador (saída) para o buffer. Nível notável também
Aqui está, este conversor de buffer maligno, preparando-se para a amputação
Baratas extraídas!

Infelizmente, é muito difícil soldá-las - as faixas são muito delicadas e saem em alguns lugares. Bem, isso não importa; eu não sou o primeiro a soldar essa ninharia.

Feito!
Agora deve ser preenchido com algo

É isso que eu conecto as faixas

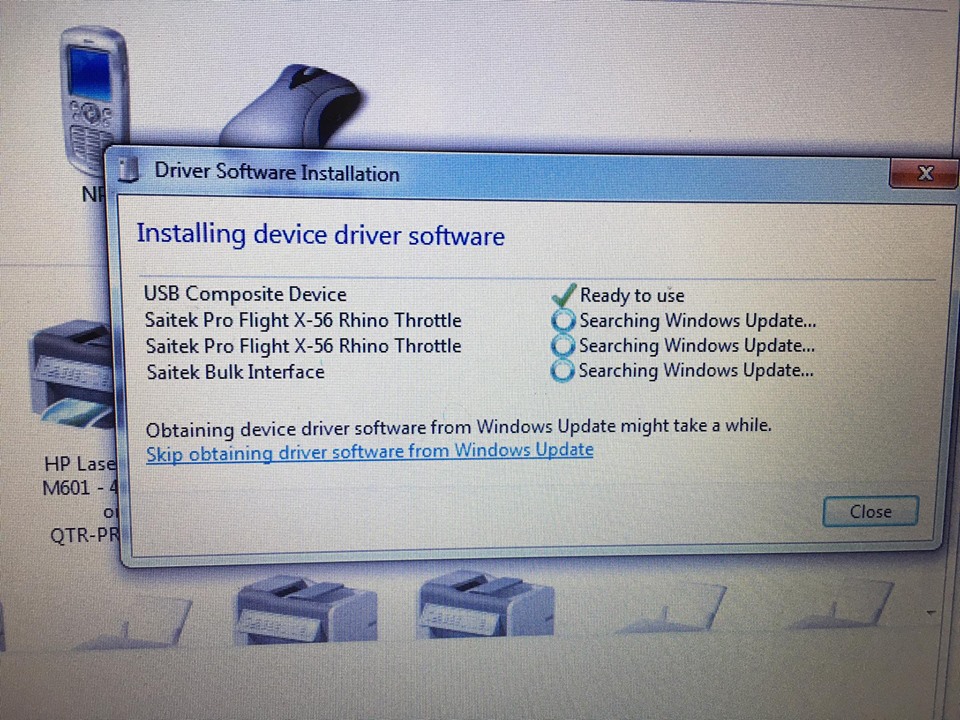
O resultado não demorou a chegar! Tudo está determinado agora!
Drivers ...
Estes são sinais sem buffer, como você pode ver pelo nível que eles são os mesmos que o controlador emitiu sem (até) um buffer

Isso é do computador ao chip - você pode ver que o nível é suficiente agora.
Brilhando! :)

Bem, é isso. Os planos colocam proteção nessas linhas.
Atualização:
Nos comentários, rstepanov sugeriu que a barata remota é IP4234CZ6:
IP4234CZ6
Vou colocá-lo de volta quando ele chegar.