
O progresso em veículos não tripulados acelerou rapidamente nos últimos anos. A partir de 1º de dezembro de 2018, os drones
poderão circular livremente pelas estradas públicas em Moscou e Tartaristão. Parece que um pouco mais e podemos entrar no carro e fazer nossos próprios negócios, enquanto nosso transporte assumirá a gestão de todo o processo de direção. Sonhos, sonhos, mas do que esse carro é realmente capaz e substituirá uma pessoa?
A caminho da total autonomia
A comunidade internacional de engenheiros automotivos (SAE International) desenvolveu uma classificação de seis níveis de autonomia de automóveis. Este sistema demonstra o caminho que os automóveis percorreram nas últimas décadas e descreve as dificuldades que ainda precisam ser resolvidas para criar um veículo verdadeiramente não tripulado.
Nível 0 - sem autonomia. Todas as máquinas que não interferem no processo de controle podem ser atribuídas a esse nível. Sem um homem, esse carro não se mexe e não pode evitar um acidente. ABS ou sensores de estacionamento - é tudo o que você pode esperar de um carro de nível zero.
Nível 1 - ajuda mínima. Inclui carros que podem dirigir a direção ou aceleração / frenagem com monitoramento constante do motorista. Isso também inclui sistemas de assistência ao estacionamento quando o carro está dirigindo e o motorista está pedalando.
Nível 2 - assistência com atenção do motorista. No segundo nível, há uma automação completa de processos simples que requerem controle automático simultâneo de direção e movimento. Isso inclui sistemas avançados de assistência ao motorista (ADAS) avançados.
Nível 3 - piloto automático limitado. O nível da fronteira em que já é possível falar sobre o piloto automático de pleno direito operando no contexto de cenários individuais. Ao contrário dos carros do segundo nível, os carros do terceiro não exigem atenção constante do motorista - uma pessoa pode cuidar dos seus negócios, sem pegar no volante a cada meio minuto.
Nível 4 - piloto automático nas cidades. Os carros de quarto nível diferem do piloto automático absoluto (5º nível), pois precisam de mapas de terreno 3D com os quais o carro será verificado enquanto estiver dirigindo, examinando o terreno. Se o carro do quarto nível estiver em uma área que não esteja nesses mapas, o piloto automático entrará no modo de terceiro nível ou será desligado completamente.
Nível 5 - piloto automático completo. O mesmo piloto automático esférico no vácuo que pode se mover em qualquer clima e em qualquer lugar do mundo: se será uma estrada quebrada sem marcação, uma clareira na floresta, um desfiladeiro nevado, uma metrópole movimentada - um piloto automático de quinto nível irá a qualquer lugar, analisando a situação em movimento. Ele não precisa de placas 3D preparadas - um carro autônomo de quinto nível com suas habilidades corresponde a um motorista vivo.
Como funcionam os carros autônomos reais?
Câmera + processador de imagemAo desenvolver os primeiros veículos não tripulados, as câmeras eram a principal maneira de perceber o espaço ao redor do carro. Eles tornaram possível obter rapidamente imagens na faixa visível com um amplo ângulo de visão. No entanto, uma única imagem de câmera não é suficiente para o carro autônomo funcionar com sucesso; um drone precisa de um análogo eletrônico do cérebro humano, ou seja, um processador de processamento de imagem especializado.
A criação desses processadores é realizada por grandes empresas experientes e startups, diz Mobileye, que se tornou parte da Intel, NVIDIA. Desenvolvimentos semelhantes estão na Toshiba. A família de processadores
Toshiba Visconti processa imagens de quatro câmeras, avaliando as imagens de uma só vez de acordo com vários critérios: marcações, carros em movimento e estacionados, semáforos e sinais, faróis, pedestres e ciclistas. Após identificar e classificar objetos em vídeo, o processador transmite informações para o "cérebro" da máquina, cujo piloto automático já decide sobre o comportamento ideal. É assim que o sistema estendido de assistência ao motorista do ADAS funciona, evitando colisões e colisões com pedestres (critério de autonomia de segundo nível).
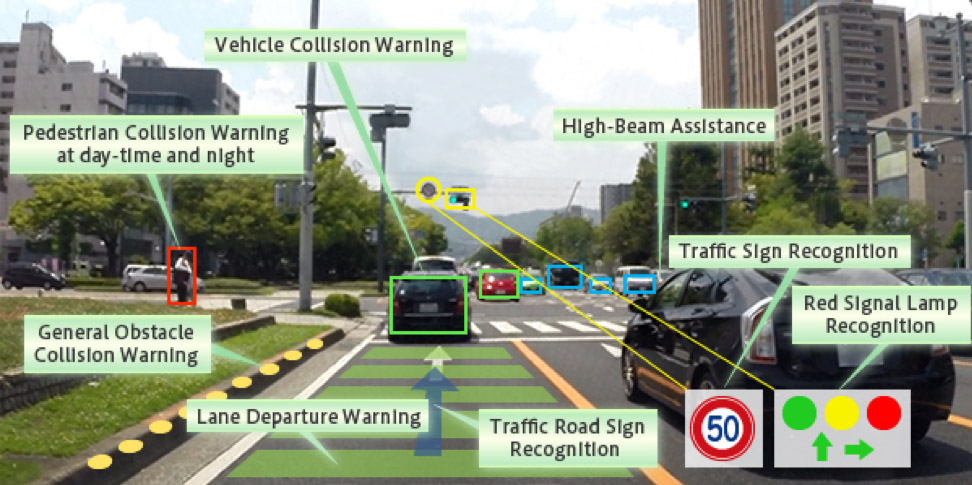 Um conjunto de câmeras e um processador Toshiba Visconti monitora a situação do tráfego melhor e com mais atenção do que uma pessoa. Fonte: Toshiba
Um conjunto de câmeras e um processador Toshiba Visconti monitora a situação do tráfego melhor e com mais atenção do que uma pessoa. Fonte: ToshibaO ciclo completo das gerações anteriores da Toshiba Visconti, da aquisição de imagens à emissão de informações com resultados de reconhecimento, levou até 100 ms. No Visconti 4, o ciclo foi reduzido para 50 ms. Na melhor das hipóteses, o tempo de resposta do driver é de 500 ms. Durante esse período, um carro viajando a 80 km / h passará 11 metros - uma longa distância em caso de uma situação perigosa na estrada.
Visconti também resolve o problema da visão monocular - o processador é capaz de construir uma reconstrução tridimensional do espaço, analisando a sequência de quadros durante o movimento. Isso funciona para objetos em movimento e estacionários na estrada e além.
RadarAs câmeras não conseguem reconhecer objetos remotos e construir mapas detalhados; além disso, sua funcionalidade depende diretamente das condições climáticas. Essas deficiências podem ser compensadas por radares emitindo sinais de rádio com uma frequência de dezenas de gigahertz. Eles idealmente identificam obstáculos no espaço. Radares com frequência de 24 GHz e 77 GHz já são usados em sistemas ADAS caros para frenagem precoce ao detectar o cruzamento de direção com um pedestre ou outro carro. Ao contrário das câmeras, os radares têm um ângulo de ação muito estreito, inversamente proporcional ao alcance desejado. Além disso, o radar tem um alto custo (no nível de US $ 1.000), o que limita imediatamente o alcance de seu uso exclusivamente por carros representativos e premium.
Os radares fazem um excelente trabalho na localização de objetos, mas sem determinar sua forma e apenas em um intervalo estreito.LidarOs lidares são considerados os mais eficazes, mas ao mesmo tempo o sensor mais controverso para carros autônomos. Eles constroem uma imagem detalhada do mundo ao seu redor com a ajuda de raios laser que são refletidos por obstáculos e voltam. Além disso, os lidares fazem isso com precisão inatingível para outros sensores. Usando um lidar, um carro cria seu próprio mapa 3D dezenas de metros ao redor, reconhecendo carros, pessoas e quaisquer obstáculos.
Então vê o mundo um carro com um LidarNo entanto, o lidar tem mais deficiências do que vantagens. Em primeiro lugar, os lidares tornam-se impotentes sob chuva forte ou durante a queda de neve - os raios laser são refletidos pelas gotas de água e pelos flocos de neve. Em segundo lugar, o lidar deve ter uma visão circular completa, o que significa que cria uma "corcunda" no teto do carro. Em terceiro lugar, os lidares não são apenas caros, mas muito caros: os primeiros modelos Velodyne custam US $ 75.000, os designs modernos da Waymo custam US $ 7.500.
 A linha de lidares Velodyne. Fonte: Velodyne
A linha de lidares Velodyne. Fonte: VelodyneA aparência de lidares de estado sólido sem partes móveis deve reduzir o custo dos dispositivos em ordens de magnitude nos próximos anos. Velodyne afirma ter feito um avanço que reduzirá o preço dos lidares para US $ 50.
A Toshiba, por sua vez, está trabalhando para melhorar a eficácia dos lidares. Portanto, este ano foi introduzido um
novo chip que combina cadeias para analisar dados a longas e curtas distâncias. Isso nos permitiu dobrar o alcance efetivo dos lidares para 200 m, além de nos livrar do problema do brilho, que afetava a qualidade das reflexões.
Como isso funciona para ...
... Tesla
Para implementar o piloto automático, um sistema de oito câmeras com ângulos e faixas de visualização diferentes, 12 sensores ultrassônicos em círculo e um radar frontal de longo alcance são instalados nos carros da Tesla. Os sensores ultrassônicos são responsáveis pelo reconhecimento de carros em fileiras e obstáculos adjacentes ao dirigir em baixa velocidade. As câmeras são responsáveis por encontrar pedestres, carros, marcações e placas. Ajuda-os neste radar. O GPS é usado para percorrer a rota e os sensores monitoram que o carro entra estritamente nas faixas e evita acidentes. Por um lado, isso permite que você use o piloto automático Tesla em qualquer cidade. Por outro lado, para operação, o piloto automático ainda requer a atenção do motorista.
A Tesla intencionalmente não usa o lidar; Elon Musk se opõe abertamente aos lidares, justificando isso com seu preço e trabalho problemático com mau tempo. É difícil discordar dele - um adicional de 7 a 10 mil dólares ao preço e uma “corcunda” no telhado não aumentariam a atratividade de Tesla.
Não importa a aparência de um monte de câmeras, radares e sensores ultrassônicos, e eles apresentam mau funcionamento. Em 2018, o Tesla Model S no modo de piloto automático colidiu com um separador de estradas, o que causou a morte do motorista. Como mostrou a
investigação por parte dos proprietários do carro elétrico, o piloto automático da Tesla não conseguiu ler corretamente as marcações apagadas, e as câmeras e radares, por sua vez, não viram o perigo na barreira de aço que se aproximava rapidamente.
... WaymoOs sistemas Waymo usam lidar, cinco radares, oito câmeras e GPS, e o Chrysler Pacifica Hybrid (agora 600, com planos de compra de 62 mil unidades) e o Jaguar I-PACE (20 mil unidades em planos) são selecionados como transportadores comerciais seriais.
 O carro elétrico Waymo Jaguar I-PACE não é tão utilitário quanto o espaçoso Chrysler Pacifica, mas parece incrível - mesmo o lidar no teto não estraga a vista. Direitos autorais: Waymo
O carro elétrico Waymo Jaguar I-PACE não é tão utilitário quanto o espaçoso Chrysler Pacifica, mas parece incrível - mesmo o lidar no teto não estraga a vista. Direitos autorais: WaymoAo dirigir, o Waymo usa os dados do Google Street View, referindo-se a ele usando seus sensores. Graças a isso, é alcançada total autonomia - ao contrário da Tesla, os carros Waymo realmente não requerem intervenção do motorista, mas simplesmente transportam passageiros. Ao contrário da Tesla, a Waymo não vende carros, mas um serviço de transporte, ou seja, robôs.
O vídeo panorâmico da Waymo ajuda você a entender como o seu carro autônomo reconhece o ambiente.A principal desvantagem do Waymo é a lista extremamente limitada de cidades onde os drones operam - para que o piloto automático funcione corretamente, o ambiente urbano deve ser filmado em 3D, e este é um procedimento longo e complicado, então o Waymo atualmente opera em apenas duas dúzias de cidades americanas. No entanto, a expansão da rede rodoviária é apenas uma questão de tempo. Tenha um ótimo tempo.
... YandexA Yandex apresentou seu projeto de veículo não tripulado há apenas um ano. Um bloco de lidar, câmeras, radares, GPS e IMU, ou seja, componentes típicos de carros autônomos, foi instalado no Toyota Prius. De Yandex, o drone obteve uma plataforma de software que se mostrou bem tanto ao dirigir pelas ruas estreitas de Moscou no distrito de Khamovniki quanto ao viajar longas distâncias de Moscou a Kazan.
Chegando ao Tartaristão, o carro Yandex permaneceu lá, tornando-se o primeiro táxi não tripulado na Rússia. Agora ele trabalha na cidade de Innópolis, transportando passageiros entre os cinco pontos principais. E em outubro, um táxi semelhante apareceu no território de Skolkovo. Nos planos distantes da empresa de trazer táxis não tripulados para as ruas da cidade em uma base comercial.
... KAMAZEm 2016, o NAMI State Institute mostrou o “microônibus” não tripulado do SHATL, que não passava de um carro-conceito experimental. Dois anos depois, o KAMAZ-1221 SHATL foi declarado o futuro projeto em série, que será colocado no transportador em 2022. Até o momento, o minibus elétrico com lidares, câmeras e sensores ultrassônicos se move cautelosamente a uma velocidade de 10 km / h, mas à medida que a plataforma de software melhora, promete-se que a velocidade seja aumentada para 110 km / h.
O que os drones mudarão?
A exclusão do fator humano aumentará as condições marginais de operação dos carros - aumentará a velocidade máxima, reduzirá a largura das faixas, reduzirá a distância entre os carros no fluxo. Como resultado, o rendimento das estradas aumentará significativamente, a velocidade média aumentará e o número de congestionamentos diminuirá.
De acordo com o American Highway Capacity Manual, uma faixa da estrada por hora passa cerca de 2.200 carros movidos a pessoas. Vários estudos mostram que a transição para carros autônomos aumentará esse número para 7200-12000 carros por hora. Um salto tão impressionante na eficiência do uso da estrada é alcançado aumentando a velocidade segura e reduzindo a distância entre carros na faixa de 40-50 metros para 6-7 metros - para carros que transmitem informações sobre sua velocidade e manobras estimadas entre si, essa distância será suficiente para segurança. movimento.
No entanto, ainda estamos longe de um futuro não tripulado. Carros de série de montadoras conhecidas acabam de adaptar o segundo nível de autonomia, os melhores e mais caros modelos estão se preparando para passar para o terceiro nível. Mas na próxima década, não vale a pena sonhar com os drones do quinto nível de autonomia - por um longo tempo uma pessoa será a principal na estrada.