Olá pessoal!
A questão do desenvolvimento físico de seus próprios filhos é sempre relevante. O filho mais novo completou três anos e, além de caminhar, queria encontrar aulas para ele com viés esportivo. Como ele está interessado em vários tipos de transporte, a escolha naturalmente caiu na corrida. E, depois de assistir aos vídeos incendiários, enquanto as crianças mais velhas atropelam as bicicletas de corrida, decidi investigar o problema com mais detalhes. Armado com o IMU da Amperka por 10 graus de liberdade, o Raspberry Zero W com uma fonte de alimentação e 40 linhas de código em Python, fui para uma escola de corrida. O que veio disso - veja por baixo)

As bicicletas de corrida não são tão difundidas quanto as bicicletas ou patinetes infantis, mas têm várias vantagens em relação a outros modos de transporte. A criança pode sentar na sela, como em uma bicicleta e empurrar com as duas pernas alternadamente. Isso proporciona uma carga mais uniforme nas pernas e nas costas. Ao contrário de uma scooter, onde apenas uma perna de pressão funciona. Um bônus adicional é que a criança aprende a se equilibrar. Ou seja, a transferência para uma bicicleta de duas rodas deve ocorrer sem complicações.
Basicamente, os designs das runbikes são bastante simples. Trata-se de uma estrutura de metal (alumínio ou aço), um volante, uma sela e duas rodas (bombeadas para modelos mais caros ou feitos de espuma de borracha). Existem alguns modelos com uma suspensão nas rodas traseiras.

O amortecimento da roda traseira me pareceu um detalhe particularmente importante. Uma criança em uma corrida de corrida inevitavelmente pula de meio-fio e anda em estradas irregulares (moramos na Rússia). Portanto, a presença de um amortecedor deve, em teoria, reduzir a carga na parte traseira. No futuro, à medida que o profissionalismo do jovem piloto crescer, o amortecedor também permitirá que você faça
saltos e outros truques semelhantes .
Tendo vasculhado a Internet, descobri que ninguém havia quantificado anteriormente as cargas que caem no quadro da bicicleta ao pular de vários obstáculos. O interesse nesta edição e uma pequena quantidade de tempo livre levaram ao fato de eu reunir dos materiais em mãos uma simples bancada de testes.
As acelerações serão medidas com um acelerômetro de três eixos do
sensor IMU fabricado pela Amperka. Não é possível usar o acelerômetro de telefones celulares para medir acelerações devido ao baixo limite de medição (+ -2G). A faixa de medição para cada um dos eixos do módulo Amperka é de + -8G, espero que isso seja suficiente.
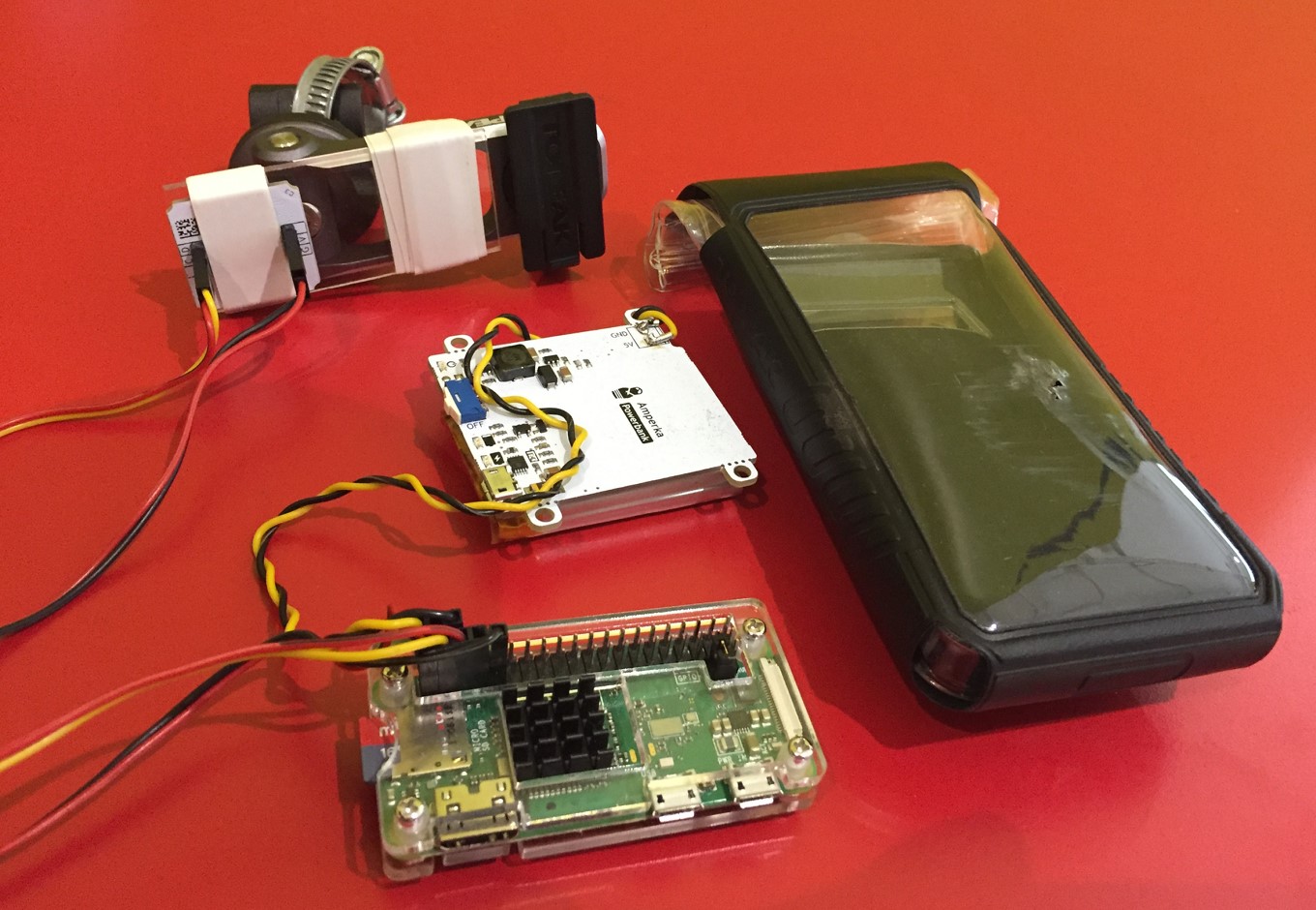
O sensor IMU foi conectado ao quadro usando o suporte Topeak (eu tive que removê-lo temporariamente da minha bicicleta), um pedaço de acrílico e várias camadas de fita isolante. Um Raspberry Pi Zero W de placa única foi usado para pesquisar o sensor.Um pequeno script Python pesquisou o acelerômetro com um período de cerca de 10 ms:
imu.pyimport time from pytroykaimu import TroykaIMU imu = TroykaIMU() imu.accelerometer.set_range('8G') file_name = '' print(' ( )') file_name = str(input ()) file_name = file_name + '.csv' print(' , Ctrl+C') t0 = time.time() imu_array = [] while True: try: ax, ay, az = imu.accelerometer.read_gxyz() gx, gy, gz = imu.gyroscope.read_radians_per_second_xyz() imu_array += [time.time(), ax, ay, az, gx, gy, gz] time.sleep(0.006) except KeyboardInterrupt: t1 = time.time() lines = int(len(imu_array)/7) print(" - -", lines, '- ', file_name) imu_file = open(file_name, 'w') imu_file.write('time,ax,ay,az,gx,gy,gz' + '\n') for i in range(lines): imu_file.write(str(imu_array[7*i]) + ',' + str(imu_array[7*i+1]) + ',' + str(imu_array[7*i+2]) + ',' + str(imu_array[7*i+3]) + ',' + str(imu_array[7*i+4]) + ',' + str(imu_array[7*i+5]) + ',' + str(imu_array[7*i+6]) + '\n') imu_file.close() print (' , -', t1 - t0, '') break
O Power Raspberry foi removido do
Power Bank do mesmo Amperka e eu
iniciei remotamente de uma célula com um terminal instalado não para ele. Escondi a placa única com uma fonte de alimentação em um estojo para telefone celular e conectei o sensor IMU ao espigão das bicicletas de corrida estudadas da seguinte maneira:

Fizemos medições em conjunto com Evgeny Ivanov da
escola BegovelMsk em Moscou . A escola de corrida para o teste gentilmente forneceu duas motos (
Puky LR Ride e
Early Rider Trail Runner 14 ). Esses dois modelos são comuns em escolas de corrida, o primeiro - principalmente para truques, o segundo - para bicicletas. Os pneus de ambos os modelos foram inflados para cerca de 3,5 atmosferas.
O teste consistiu no fato de o piloto Artyom pular de um pequeno trampolim na pista de corrida testada:

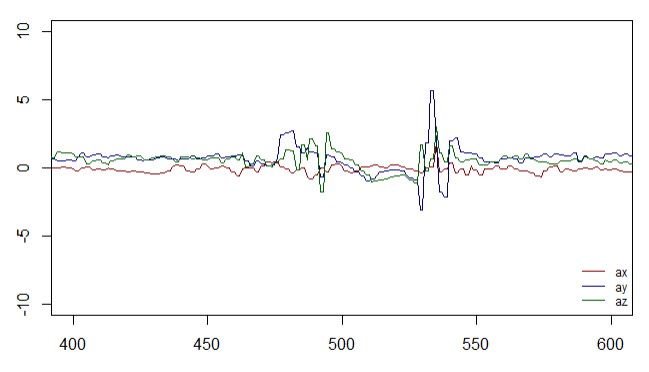
Como resultado, para cada salto no cartão SD, o Raspberry estabeleceu um arquivo com pesquisas nos três eixos do acelerômetro a cada 10 ms. Esse gráfico pode ser derivado de cada arquivo; as acelerações em G são plotadas ao longo do eixo vertical:
Os gráficos para saltos semelhantes mostraram-se bastante semelhantes, mas as curvas de aceleração para os dois modelos estudados de runbikes são muito diferentes. Para simplificar a imagem, apenas os componentes verticais das acelerações são plotados no gráfico a seguir (para nosso experimento, este é o eixo Y dividido pelo cosseno do ângulo de desvio da vertical). O gráfico também mostra a hora de chegada no trampolim (determinada pelo vídeo das corridas) e a hora de tocar o chão após o salto (este é o sinal máximo em amplitude).
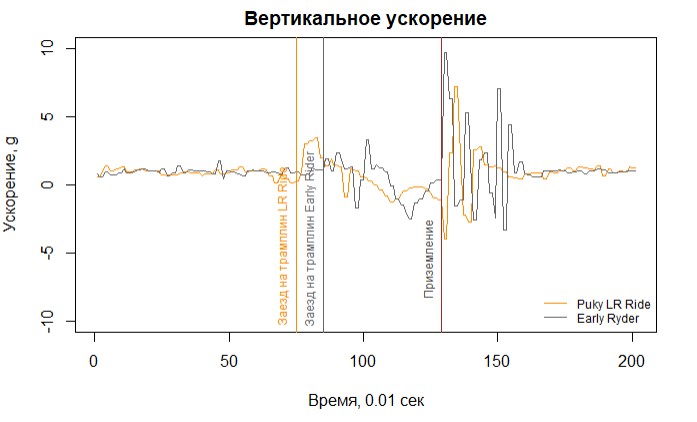
Como você pode ver, o quadro está funcionando (e com ele a criança) ao pular de um trampolim, ele sofre uma carga de choque de curto prazo de até 10G! Inesperadamente. Eu pensei que a carga era muito menor. Pode-se concluir que não vale a pena correr pela calçada enquanto estiver sentado como o quinto ponto na sela. Caso contrário, o golpe cairá na coluna vertebral e nos órgãos internos da criança. Seria ideal transferir essa carga para as pernas. Portanto, para o modelo Puky LR Ride, está disponível uma
etapa especial , na qual a criança se transforma em pés ao executar manobras.

Que outras conclusões podem ser tiradas dessas curvas? Aproximadamente o seguinte:
- O amortecedor no LR Ride reduz a carga de choque no chassi do corredor em cerca de 30% (provavelmente ainda mais, pois o acelerômetro satura no chassi rígido do Trail Runner 14). Além disso, a natureza do aumento na carga muda, torna-se mais suave que um modelo sem amortecedor.
- O amortecedor ajuda a aumentar a distância do salto, já que a criança pode usá-lo como uma espécie de mola em frente ao trampolim (preste atenção na curva laranja antes de entrar no trampolim).
- O amortecedor amortece as vibrações residuais do quadro da pista de corrida; pode-se substituir que, após o salto, o LR Ride é muito menor que o Trail Runner 14, tanto em tempo quanto em amplitude. Isso melhora o manuseio da corrida e o conforto do ciclista.
Esses resultados inesperadamente interessantes foram obtidos de um experimento simples. No final, mais uma vez agradeço à escola de corrida, o piloto Artyom e o treinador
Evgeny Ivanov .

Obrigado por ler até o fim e até breve!