Se você abriu este artigo, provavelmente já ouviu falar sobre quaternions e talvez até os use em seus projetos. Mas é hora de subir para um nível mais alto - para os biquaternions.
Este artigo fornece conceitos básicos sobre biquaternizações e operações com eles. Para uma melhor compreensão do trabalho com biquaternions, é mostrado um exemplo claro em Javascript usando o Canvas.
Biquaternion
O biquaternion é um número hipercomplexo, com uma dimensão 8. Nos artigos e literatura em inglês, eles são chamados de "quaternion duplo", e na literatura em russo também há os nomes "quaternion dual" ou "quaternion complexo".
A principal diferença dos quaternions é que o quaternion descreve a orientação do objeto no espaço, e o biquaternion também descreve a posição do objeto no espaço.
Biquaternion pode ser representado como dois quaternions:
w i d o e t i l d e t e x t b f q = b e g i n b m uma t r i x t e x t b f q 1 t e x t b f q 2 e n d b m uma t r i x ,
t e x t b f q 1 - a parte real, determina a orientação do objeto no espaço;
textbfq2 - a parte dupla, determina a posição do objeto no espaço.
O biquaternion também é chamado de quaternion complexo, neste caso é representado como um quaternion, cada componente do qual é um número duplo (a não ser confundido com o complexo). Número duplo
A=a1+ epsilona2 onde
a1 e
a2 São números reais e
epsilon - símbolo de Clifford (complexidade), possuindo a propriedade
epsilon2=0 . Não vamos nos aprofundar na matemática, pois estamos mais interessados na parte aplicada; portanto, consideraremos o biquaternion como dois quaternions.
Interpretação geométrica do biquaternion
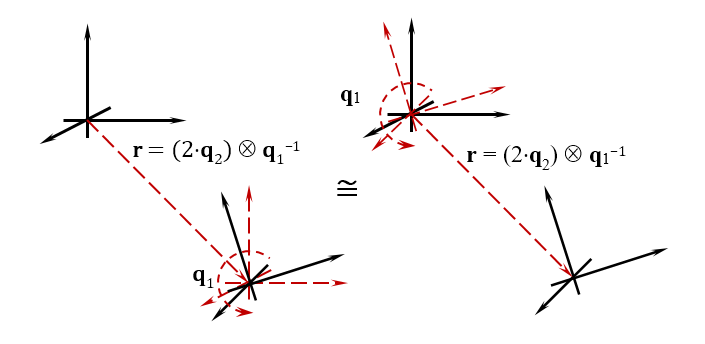
Por analogia com o quaternion, com o qual você pode definir a orientação do objeto, o biquaternion também pode definir a posição. I.e. O biquaternion define dois valores ao mesmo tempo - a posição e a orientação do objeto no espaço. Se os considerarmos em dinâmica, o biquaternion define duas quantidades - a velocidade linear do movimento e a velocidade angular de rotação do objeto. A figura abaixo mostra o significado geométrico de biquaternion.
Os desenvolvedores de jogos sabem que, para determinar a posição e a orientação de um objeto no espaço do jogo, são utilizadas matrizes de rotação e de deslocamento e, dependendo da ordem em que você as aplica, o resultado da posição final do objeto é diferente. Para aqueles que estão acostumados a dividir o movimento em operações separadas, aceite a regra para trabalhar com biquaterniões: primeiro movemos o objeto e depois o rotacionamos. De fato, você está descrevendo esses dois movimentos com um único número, embora um hipercomplexo complexo.
Características escalares
Considere as principais características escalares. Aqui é necessário prestar atenção ao fato de que eles retornam não números reais comuns, mas duplos.
1. A norma do biquaternion
| widetilde textbfq |= | textbfq1 |+ epsilon(q10q20+ textbfqT1 textbfq2)
2. Módulo Biquaternion
| widetilde textbfq|=| textbfq1|+ epsilon fracq10q20+ textbfqT1 textbfq2| textbfq1|
Operações básicas
Considere as operações básicas de trabalho com biquaternions. Como você pode ver, eles são muito semelhantes a operações semelhantes com quaternions.
1. Emparelhamento Biquaternion
widetilde textbfq∗= beginbmatrix textbfq∗1 textbfq∗2 endbmatrix
2. Adição e subtração de biquaterniões
widetilde textbfq pm widetilde textbfp= beginbmatrix textbfq1 pm textbfp1 textbfq2 pm textbfp2 endbmatrix
A adição e subtração de biquaternions é comutativa (os termos podem ser trocados).
3. Multiplicação do número real por biquaternion
a widetilde textbfq= widetilde textbfqa= beginbmatrixa textbfq1a textbfq2 endbmatrix
4. Multiplicação Biquaternion
widetilde textbfq otimes widetilde textbfp= beginbmatrix textbfq1 otimes textbfp1 textbfq1 otimas textbfp2+ textbfq2 otimes textbfp1 endbmatrix
A multiplicação de biquaterniões não é comutativa (com uma mudança na ordem dos fatores, o resultado da multiplicação de biquatiões é diferente).
Esta operação é uma das principais quando se trabalha com biquatérnions e possui um significado físico, ou seja, o resultado da multiplicação do biquaternion é a operação de adicionar as rotações e movimentos lineares de dois biquaternions.5. Batismo reverso
widetilde textbfq−1= frac widetilde textbfq∗ | widetilde textbfq |
Determinação do biquaternio através de ângulos de orientação e vetor de posição
Primeiro, definimos os sistemas de coordenadas nos quais consideraremos a orientação e a posição do objeto no espaço. Isso deve ser feito para especificar a parte real do biquaternion (quaternion de orientação), cuja sequência de rotação afeta o quaternion resultante dos ângulos de orientação. Aqui seremos guiados por ângulos de avião - guinada
psi arremesso
vartheta e rolar
gama .
Defina o sistema de coordenadas da base. Imagine que você está parado na superfície da Terra e olhando na direção do norte.
Ponto
O o - a origem do sistema de coordenadas, localizado no ponto de origem do objeto.
O eixo
O o Y g - é direcionado verticalmente para cima e é oposto à direção do vetor de gravidade.
O eixo
O o X g - é direcionado para o norte, ao longo da tangente do meridiano local.
Eixo
O o Z g - complementa o sistema para a direita e é direcionado para a direita, em direção ao leste.
O segundo sistema de coordenadas está conectado. Imagine, por exemplo, um avião ou outro objeto.
Ponto
O - a origem do sistema de coordenadas, via de regra, está localizada no ponto do centro de massa do objeto.
Eixo
OY - direcionado verticalmente para cima e perpendicular ao plano horizontal do objeto.
Axis
OX - direcionado para o ponto frontal do objeto.
Eixo
OZ - complementa o sistema à direita.
A posição do objeto no espaço é determinada pelo vetor de raio da origem (ponto
O ) do sistema de coordenadas associado em relação ao sistema de coordenadas da base fixa. A orientação do sistema de coordenadas associado em relação à base é determinada por três turnos sucessivos:
ângulo da guinada
psi - rotação em torno do eixo
OY ,
ângulo de inclinação
vartheta - rotação em torno do eixo
OZ ,
ângulo de rolagem
gama - rotação ao redor do eixo
OX .
Para a determinação inicial do biquaternion, você deve especificar as partes real e dupla do biquaternion. A orientação e a posição do objeto são definidas em relação a um determinado sistema de coordenadas base usando ângulos de orientação
psi, vartheta, gama e vetor de posição do centro de massa
r=(rx,ry,rz)T .
A parte real
textbfq1 pode ser definido usando a fórmula:
\ textbf {q} _1 = \ begin {bmatrix} \ cos \ frac {\ psi} {2} \ cos \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} e - & \ sin \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ cos \ frac { \ vartheta} {2} \ sin \ frac {\ gama} {2} & + & \ sin \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} e + & \ sin \ frac {\ psi} { 2} \ cos \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} e - & \ sin \ frac {\ psi} {2} \ cos \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} \ end {bmatrix}
Observe que, se você tiver uma sequência de rotação diferente, as expressões também serão diferentes.
Parte dupla
textbfq2 definido pela expressão:
textbfq2= frac12 textbfr otimes textbfq1
Cálculo dos ângulos de orientação e vetor de posição do biquatérion Transformação inversa
Os ângulos de orientação podem ser calculados a partir da parte real do biquíni.
textbfq1 :
psi= arctan frac2(q0q2−q1q3)q20+q21−q22−q23
vartheta= arcsin(2(q1q2+q0q3))
gamma= arctan frac2(q0q1−q2q3)q20−q21+q22−q23
A posição do objeto é determinada pela expressão:
textbfr=2 textbfq2 otimes textbfq−11
o resultado é um vetor em forma de quaternário
textbfr=(0,rx,ry,rz)TGire e mova o biquaternion de vetor
Uma das grandes propriedades dos biquatérnions é a rotação e o movimento de um vetor de um sistema de coordenadas para outro. Seja
O o X g Y g Z g um sistema de coordenadas de base fixo e
OXYZ seja o sistema de coordenadas conectado do objeto. Em seguida, a orientação e a posição do objeto em relação ao sistema de coordenadas base podem ser especificadas pelo biquaternion
widetilde textbfq . Se um vetor for especificado
textbfr em um sistema de coordenadas conectado, você pode obter um vetor
textbfr0 no sistema de coordenadas base usando a fórmula:
textbfr0= widetilde textbfq otimes textbfr otimes widetilde textbfq−1
e de volta:
textbfr= widetilde textbfq−1 otimes textbfr0 otimes widetilde textbfq
onde
textbfr É um vetor em forma de biquíni,
textbfr=(1,0,0,0,0,0,rx,ry,rz)Biblioteca JavaScript Biquaternion
Todas as operações acima com biquaternions são implementadas na biblioteca javascript, dependendo das suas tarefas, elas podem ser implementadas em outras linguagens de programação. As principais funções do trabalho com biquaternions:
| Função | Descrição do produto |
|---|
DualQuaternion.dq | Corpo biquaternário como uma matriz de 8 números |
DualQuaternion(dq0, dq1, dq2, dq3, dq4, dq5, dq6, dq7) | Um construtor que define um biquíni, especificando todos os oito números |
DualQuaternion.fromEulerVector(psi, theta, gamma, v) | Obter biquaternion definindo a orientação do objeto com ângulos de Euler e o vetor de posição do objeto |
DualQuaternion.getEulerVector() | Obter ângulos de Euler e vetor de posição do biquaternion |
DualQuaternion.getVector() | Obter vetor de posição de biquaternion |
DualQuaternion.getReal() | Obter a parte real do biquaternion (determina a orientação do objeto no espaço) |
DualQuaternion.getDual() | Obter a parte dupla do biquaternion (determina a posição do objeto no espaço) |
DualQuaternion.norm() | Obter a norma biquaternion como um número duplo |
DualQuaternion.mod() | Obtenha o módulo biquaternion como um número duplo |
DualQuaternion.conjugate() | Obter o biquaternion conjugado |
DualQuaternion.inverse() | Obter Biquaternion reverso |
DualQuaternion.mul(DQ2) | Multiplicação biquaternion |
DualQuaternion.toString() | Converter biquaternion em uma cadeia de caracteres, por exemplo, para saída no console de depuração |
Arquivo dual_quaternion.js Um exemplo de trabalho com biquaternions
Para uma melhor compreensão dos conceitos básicos do uso de biquaternions como exemplo, considere um pequeno jogo. A área retangular é definida - o mapa. Um navio flutuando em um mapa com uma pistola rotativa montada no mapa. Aqui é necessário levar em consideração que, para o navio, o sistema de coordenadas básicas é o sistema de coordenadas do mapa, e para a arma o sistema de coordenadas básicas é o navio. Todos os objetos são desenhados no sistema de coordenadas do mapa e aqui será interessante ver como é possível ir do sistema de coordenadas da pistola para o sistema de coordenadas do mapa usando a propriedade de multiplicação do biquaternion. O movimento do navio é controlado pelas teclas W, A, S, D. A direção da arma é definida pelo cursor do mouse.

O navio e a arma são descritos por duas classes:
Ship e
Gun . No construtor da classe de navio, sua forma na forma de pontos de biquíni, a orientação inicial e a posição no mapa na forma de
this.dq_pos biquaternion são
this.dq_pos .
Também são fornecidos incrementos de biquaternidade para o controle do navio. Ao se mover para frente e para trás (teclas W, S), apenas a parte dupla do biquíni é alterada e, ao controlar a esquerda e a direita (teclas A, D), a parte real e dupla do biquaternion muda, o que define o ângulo de rotação.
function Ship(ctx, v) { this.ctx = ctx; this.dq_pos = new DualQuaternion.fromEulerVector(0*Math.PI/180, 0, 0, v);
Na própria classe, há apenas uma função para renderizar a
Ship.draw() . Preste atenção à aplicação da operação de biquatérion de multiplicar cada ponto do navio pelo biquatérion da posição e orientação atual do navio.
Ship.prototype = { 'ctx': 0, 'dq_pos': new DualQuaternion.fromEulerVector(0, 0, 0, 0, 0, 0), 'draw': function() {
No construtor da classe de armas, sua forma na forma de pontos de biquíni é especificada. A arma será exibida como uma linha. A orientação e posição iniciais no navio são definidas pelo
this.dq_pos biquaternion. Além disso, a ligação ao navio em que está instalado também é definida. A pistola no navio só pode girar, então o biquaternion aumenta quando o controle da arma muda apenas a parte real do biquaternion, que define o ângulo de rotação. Neste exemplo, o implemento é guiado pelo cursor do mouse, de modo que a rotação da pistola ocorrerá instantaneamente.
function Gun(ctx, ship, v) { this.ctx = ctx; this.ship = ship;
Na classe gun, apenas uma função de renderizar
Ship.draw() também
Ship.draw() implementada. A arma é exibida como uma linha, que é definida por dois pontos
this.dq_backward e
this.dq_forward . Para determinar as coordenadas dos pontos da pistola, é utilizada a operação de multiplicação do biquaternion.
Gun.prototype = { 'ctx': 0, 'ship': 0, 'dq_pos': new DualQuaternion.fromEulerVector(0, 0, 0, [0, 0, 0]), 'draw': function() {
O processamento de controle de navios e armas é implementado por meio de eventos. Quatro variáveis
leftPressed, upPressed, rightPressed, downPressed , que são processadas no loop principal do programa, são responsáveis por pressionar e liberar as teclas de controle do navio.
leftPressed = false; rightPressed = false; upPressed = false; downPressed = false; dq_mouse_pos = new DualQuaternion.fromEulerVector(0, 0, 0, [0, 0, 0]); document.addEventListener("keydown", keyDownHandler, false); document.addEventListener("keyup", keyUpHandler, false); document.addEventListener("mousemove", mouseMoveHandler, false);
Uma das funções mais interessantes, do ponto de vista do uso de operações de biquíni, é controlar a arma do navio na direção do ponteiro do mouse. Primeiro, as coordenadas do ponteiro do mouse são determinadas no
dq_mouse_pos biquaternion. Em seguida, o biquatião da posição do mouse em relação ao navio é calculado usando a multiplicação do biquatino. O biquatião do navio é retirado do
dq_mouse_pos_about_ship = ship_1.dq_pos.inverse().mul(dq_mouse_pos); do mouse
dq_mouse_pos_about_ship = ship_1.dq_pos.inverse().mul(dq_mouse_pos);(Nota: as operações de multiplicação sequencial de biquíni são lidas da direita para a esquerda). E, finalmente, o ângulo entre os vetores da ferramenta e o mouse é determinado. O ponto inicial da arma
gun_1.dq_backward recebe o valor recebido.
function mouseMoveHandler(e) { var relativeX = e.clientX - canvas.offsetLeft; var relativeY = e.clientY - canvas.offsetTop;
No corpo principal do programa, os objetos do navio e das armas
ship_1 e
gun_1 , as informações de depuração são exibidas e o processamento de controle do navio é realizado.
var canvas = document.getElementById("myCanvas"); var ctx = canvas.getContext("2d"); ship_1 = new Ship(ctx, [100, 0, 100]); gun_1 = new Gun(ctx, ship_1, [0, 0, 0]); function draw() { ctx.clearRect(0, 0, canvas.width, canvas.height); ship_1.draw(); gun_1.draw();
O link para o arquivo contém o código completo das bibliotecas para trabalhar com quaternions e biquaternions, o próprio script do programa e o arquivo index.html, que pode ser aberto localmente no navegador para executar o exemplo acima.
Um exemplo de trabalho com biquaternionsConclusão
Você pode ter uma pergunta: por que usar um aparato matemático tão complexo quando se pode conviver com ferramentas padrão para mover e girar objetos? Uma das principais vantagens é que a forma de escrever biquaternion é mais computacionalmente eficiente, pois todas as operações com biquaternions após a expansão das expressões são lineares. Este vídeo,
Skinning geométrico com mistura aproximada de quaternário duplo, mostra o quão mais eficientes são os cálculos do biquaternion do que outros métodos.
Eu peguei principalmente informações sobre o uso de biquaternions de fontes inglesas.
Da literatura doméstica, posso aconselhar dois livros:
- Chelnokov Yuri Nikolaevich. Modelos e métodos de Quaternion e biquaternion de mecânica dos sólidos e suas aplicações. Geometria e cinemática do movimento. - trabalho teórico monumental.
- Gordeev Vadim Nikolaevich. Quaternions e biquaternions com aplicações em geometria e mecânica. - É escrito em uma linguagem mais compreensível e mostra aplicações nas tarefas de modelar estruturas espaciais curvas.