Esta história é sobre como eu construí uma plataforma de robô móvel e o destino do meu "NanoBot-a" ...
Tudo começou em 2008, quando eu era jovem ingênuo e estúpido, estava envolvido em robótica e, em geral, em vários mecatrônicos. A ideia de construir um carrinho grande se instalou na minha cabeça exuberante muito antes, e agora, depois de uma longa gestação de um plano de fabricação, comecei a construir esse milagre dos pensamentos das crianças.
E eu dei à luz esse protótipo:

Quadro de um tubo de perfil de seção quadrada 25x25mm. E suas dimensões totais são 500x500x300 mm. Bem, sim, então pensei em larga escala ... Dois motores do limpador de carros UAZ, volantes de uma bicicleta infantil pequena, tiveram que mover essa coisa, e na frente havia dois relógios climáticos. E esse gigante foi construído no apartamento.
Tendo em vista que os planos para os algoritmos de comportamento eram “napoleônicos”, um computador completo precisava estar a bordo do robô, não havia dinheiro para o mini-ITX e eu encontrei um PC comum na minha mãe ATX. Tudo isso foi bombeado para dentro e para a pilha mais duas baterias de hélio, embainharam tudo com um org de três milímetros. de vidro e, em geral, a engenhoca era em parte bonita, mas muito grande e pesada. Não consegui colocá-lo em movimento, pois surgiam dificuldades com a eletrônica e, de tempos em tempos, às vezes eu abandonava o projeto e voltava a trabalhar ...

No final, percebi que esse design é muito complicado e, como a idéia principal ainda estava na minha cabeça, foi decidido começar tudo de novo ...
Depois de quase um ano, comecei a desenhar. Então, eu estava apenas interessado em CAD e tentei estudá-los, como resultado, fiz os desenhos primeiro no AutoCAD e um pouco depois os traduzi para 3D (quando comecei a estudar o COMPASS 3D). Apresentarei os desenhos e o modelo para acesso gratuito, quem sabe quem será útil ou será interessante.
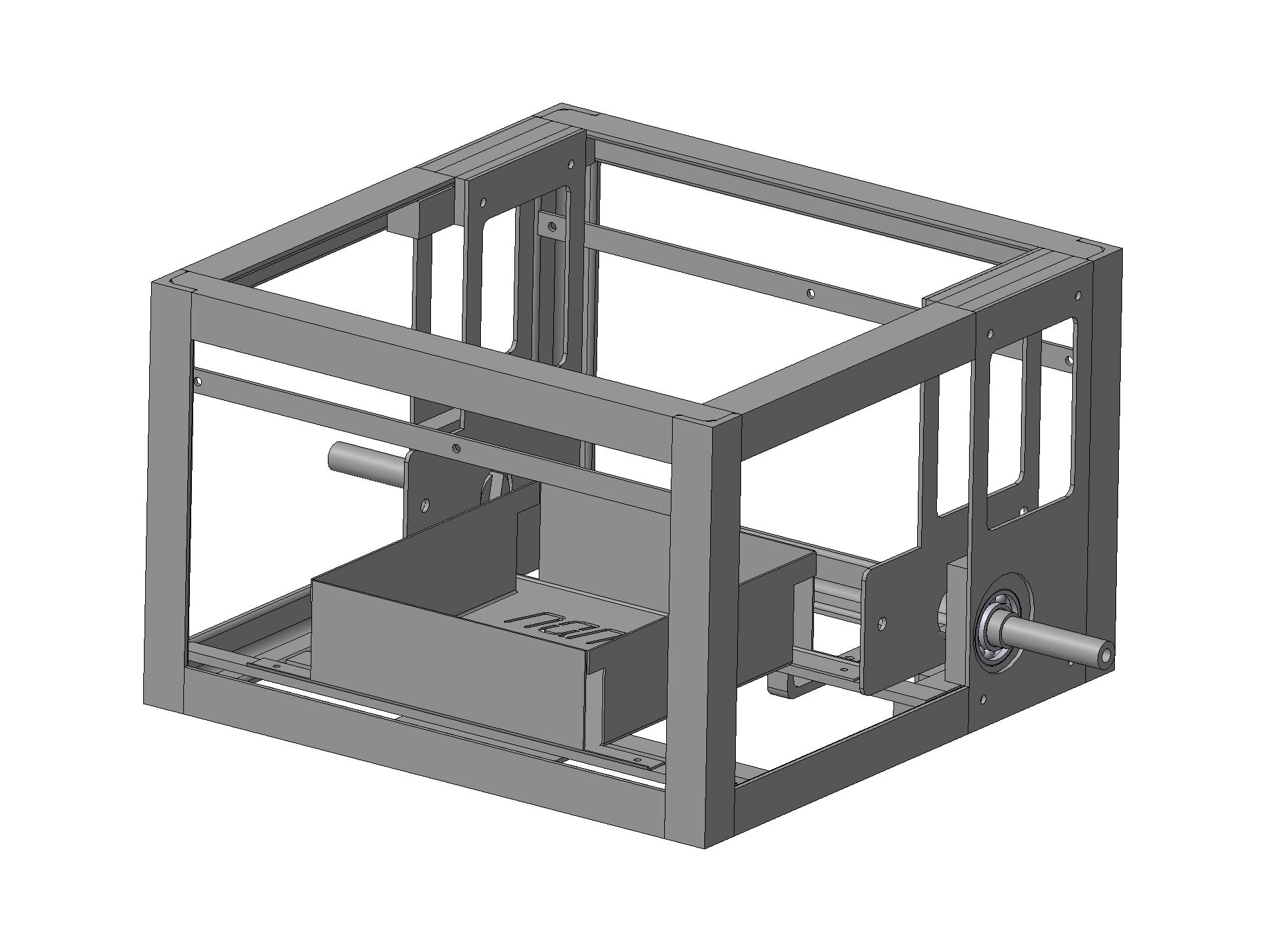
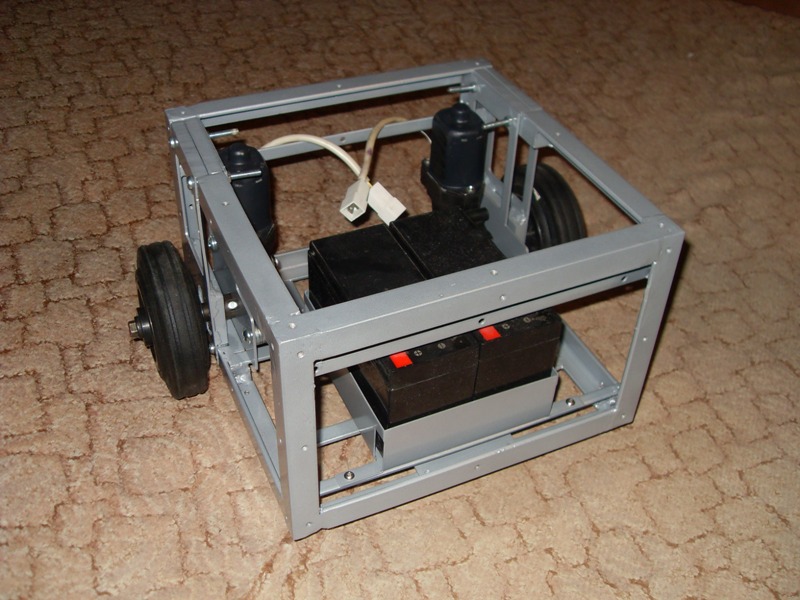
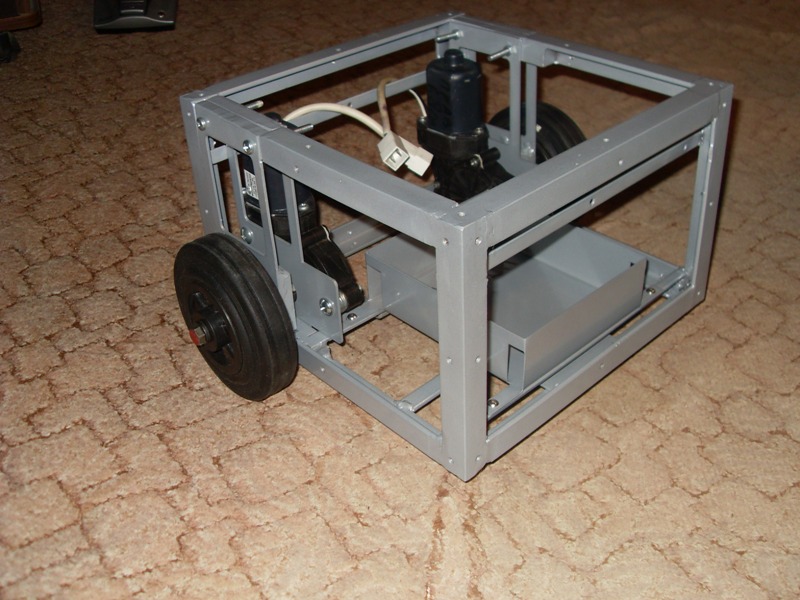
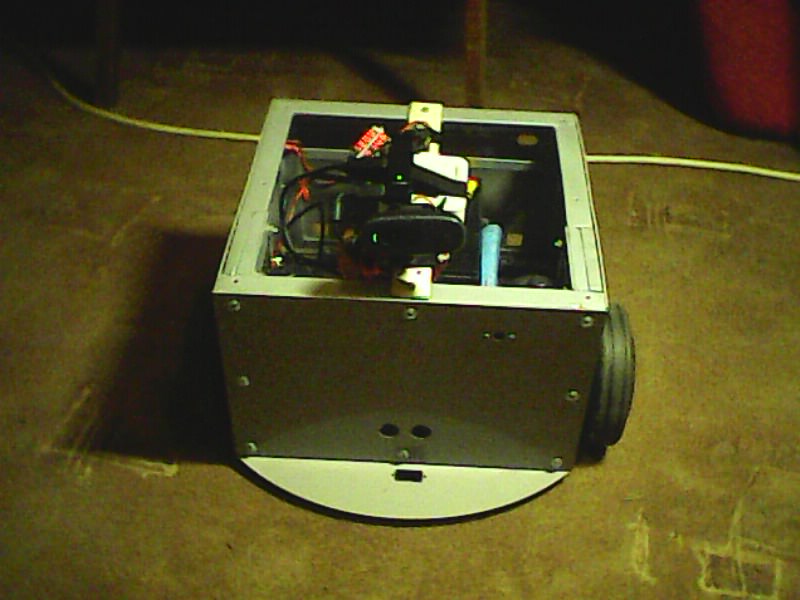
Entreguei os desenhos a uma fábrica familiar, onde uma moldura foi feita para mim para algumas garrafas de vodka (na Rússia - pelas quais é caro). Em tamanho, ele já era menor que o anterior 300x300x200 e foi fabricado no vigésimo canto. Além disso, as placas para fixação do motor e um recipiente para colocar duas baterias de 12 volts foram cortados por um laser CNC.

Como tudo isso foi feito por um longo tempo, a moldura conseguiu enferrujar e, mais tarde, dei-a para pintura a pó. Rodas com um diâmetro de 125 mm foram acopladas diretamente aos motores através dos semi-eixos adicionais instalados nos rolamentos de esferas. A frente montou uma pequena roda de palhetas. Decidi embainhar a armação com ferro, depois parecia mais tecnológica do que cortada da organização. vidro, desde que eu conhecia o escritório onde eles cortavam aço no CNC, e então ele podia ser pintado em qualquer cor ...


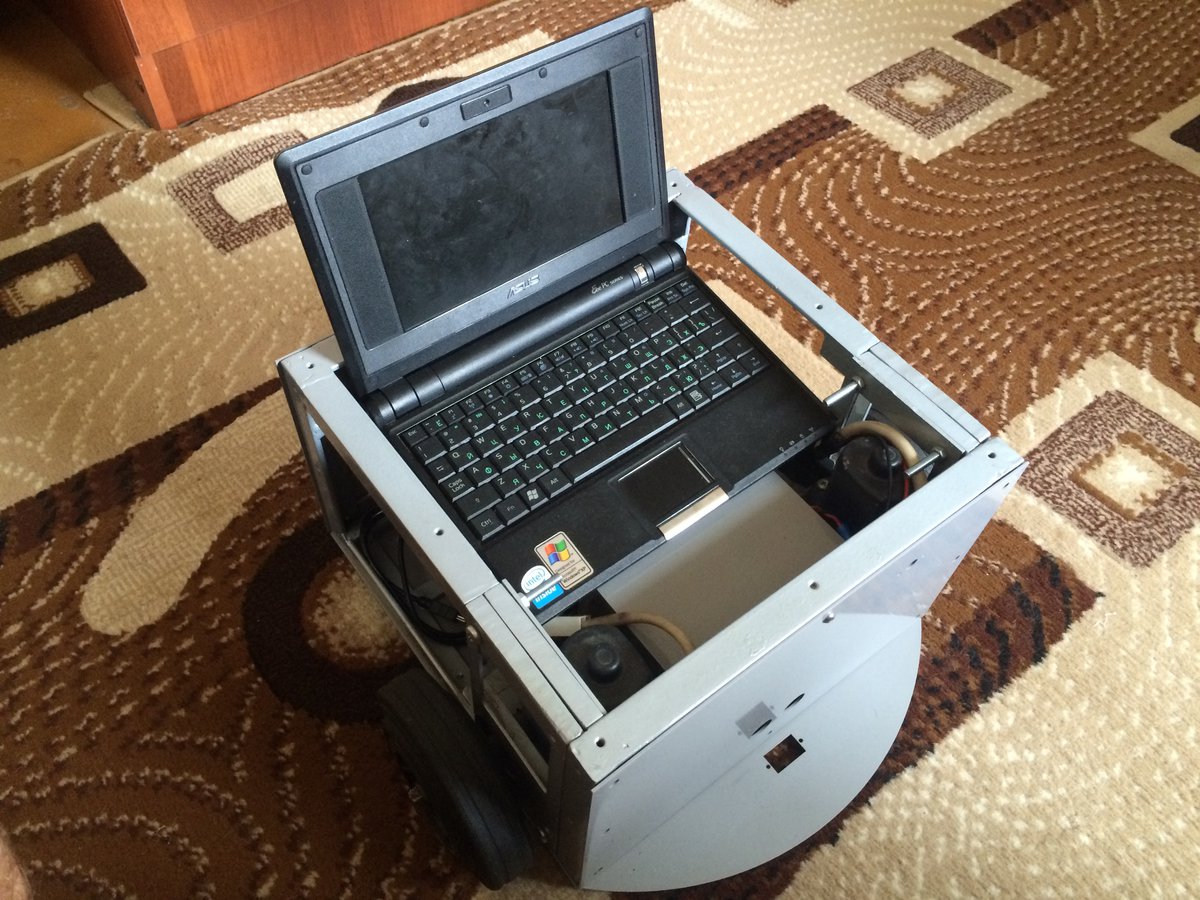
Com o quadro, tudo parece claro, vamos para a eletrônica. Foi planejado controlar o robô remotamente a partir de um PC e, a bordo, o robô também planejava colocar algo em computadores pequenos. Naquela época, eu já havia conseguido cortar um netbook antigo da ASUS de um parente, em tamanho que se encaixava perfeitamente na parte superior do robô, acima das baterias. Mas para controlar o robô, um netbook não é suficiente; para isso, foi necessário comprar mais três placas da “Open Robotics”, uma placa baseada no microcontrolador AVR para controlar e coletar dados OR-AVR-M128-DS, uma placa para comunicação com o netbook OR-USB-UART e driver da placa de alimentação OR-MD2-10A-12V-X, agora eu certamente teria feito tudo no arduino, mas não era tão popular, e esses módulos foram projetados especificamente para carros robóticos. Foi planejado conectar vários sensores do telêmetro, alguns codificadores à placa de controle e planejado para controlar vários servos para alterar o ângulo de varredura dos telémetros. Eu queria fazer um telêmetro baseado em um ponteiro laser e uma câmera de vídeo. Mas nunca chegou a isso, tudo se limitou a conectar eletrônicos e escrever um programa simples de gerenciamento. Gerenciado remotamente usando o programa TeamViewer. No meu programa, havia uma conexão simples à porta, uma janela de recepção de transmissão de dados, uma linha de entrada de velocidade (PWM em porcentagem) e vários botões de direção.
Como resultado, devido a mal-entendidos com a eletrônica, o projeto foi deixado sem a devida atenção, sendo tratado uma vez muito raramente. Com o tempo, percebi que era uma pena jogar fora o empreendimento ou colocá-lo na garagem. Decidi vender por um valor simbólico. Eu pensei que provavelmente existem pessoas que também estão interessadas nisso, que têm melhor conhecimento de eletrônica e programação, talvez alguém esteja elaborando algum tipo de algoritmo de comportamento / movimento, ou alguém precise de uma plataforma de publicidade na sala de exposições ou na loja (é claro, ele pode quebrar as pernas )
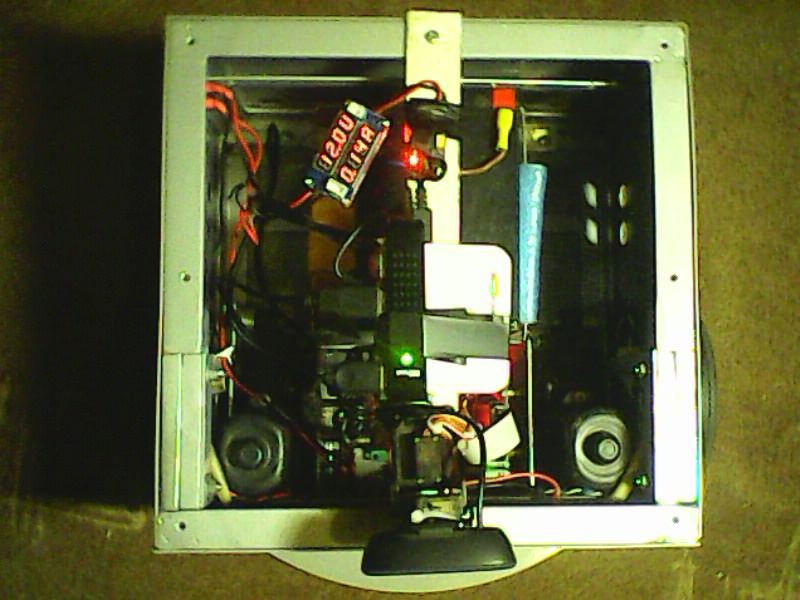
Eu o vendi inteiramente, junto com eletrônicos, uma bateria, um netbook, telémetros e servos (recortes retangulares com dois orifícios na tampa redonda inferior e superior dos servos MG996r), uma tela 16x2 e um par de matrizes de LED (recortes quadrados na folha de revestimento frontal logo abaixo deles).

Pelo que entendi, a pessoa que comprou minha plataforma de robôs deu-lhe uma segunda vida.Fiquei feliz por esse pedaço de ferro viver. Foi em 2016, e a jornada começou desde a gloriosa cidade de Ivanovo até a cidade heroica de Tula.
No entanto, recentemente, o terceiro proprietário entrou em contato comigo e disse que agora ele tem uma plataforma (região de Kaliningrado). Aparentemente, algo deu errado com o primeiro comprador ... A pessoa que entrou em contato comigo não me decepcionou, mas a plataforma foi entregue a ele sem alguns componentes relacionados, mas, caso contrário, tudo parece estar intacto, mas não surpreendente, uma vez que a pele do robô é feita de metal 1.5 mm de espessura, é hora de ele participar de batalhas de robôs ...
O robô recebeu alguma atualização e aqui está o que o novo proprietário escreveu sobre isso:
“A plataforma chegou até mim. Por algumas manipulações, uma bateria de 10 Ah 12V foi fornecida, um roteador TL-MR3020 com firmware OpenRobotisc personalizado, webcam Logitech C270 em um suporte com um servo, um micro-hub para 4 portas e um conversor DC-DC para alimentar o roteador. Então tudo foi trancado com betonilhas, fita isolante e outros meios improvisados. "Ele viveu! (C) Robocip" Um tolo infernal de 18 kg de ferro correndo por uma sala pequena como escaldada e capaz de derrubar pernas e quebrar pernas na pior das hipóteses ... Precisamos mudar as rodas para normais, trocar a roda de suporte, consertar os eletrônicos normalmente e cultivar fios. E depois de todos os ajustes e melhorias, esta caixa milagrosa será capaz de dirigir pelo quintal assustando um gato e um vizinho bêbado. E se você colocar um manipulador chinês em 6 servidores, poderá remexer objetos remotamente. ”
E esta é das notícias mais recentes e mais recentes:
Aqui está uma história sobre meu bebê, espero que o novo proprietário não abandone o robô e ele viva por um longo tempo (tanto o proprietário quanto o robô). Caso contrário, o destino da plataforma será enterrado sob uma macieira para saturar o solo com ferro. Obviamente, isso é um benefício definitivo para a macieira, mas não o objetivo direto do robô criado.
Quanto ao nome "NanoBot", tudo é bem simples. Provavelmente muitas pessoas se lembram da enorme quantidade de publicidade (na caixa de zumbis), na qual havia um prefixo tão popular "nano" que decidi adicionar esse prefixo ao nome do meu robô, especialmente porque ele descrevia completamente seus parâmetros físicos.