Na Universidade ITMO, com base no Departamento de Sistemas de Controle e Informática (SUII), foi aberto um laboratório de robótica. Contaremos sobre os projetos que estão sendo trabalhados dentro de suas paredes e mostraremos as ferramentas: manipuladores robóticos industriais, dispositivos de preensão robóticos, além de uma instalação para testar sistemas de posicionamento dinâmico usando um modelo robótico de uma embarcação de superfície.

Especialização
O Laboratório de Robótica pertence ao departamento mais antigo da Universidade ITMO, chamado "Sistemas de Controle e Ciência da Computação". Ela apareceu em 1945. O laboratório em si foi lançado em 1955 - depois lidou com questões de automação de medições e cálculo de parâmetros de navios de superfície. Mais tarde, a gama de direções foi ampliada: cibernética, CAD e robótica.
Hoje, os laboratórios estão melhorando os robôs industriais. Os funcionários resolvem problemas relacionados às interações homem-máquina - desenvolvem algoritmos de controle seguro com o controle da força do robô e também trabalham em robôs colaborativos que podem executar tarefas lado a lado com as pessoas.
O laboratório também desenvolve métodos alternativos para controle remoto de grupos de robôs e cria algoritmos de software que podem ser reconfigurados para executar novas tarefas online.
Projetos
Vários sistemas robóticos de laboratório foram adquiridos de grandes empresas e destinam-se a pesquisas ou fins industriais. Parte do equipamento foi fabricada pelos funcionários como parte da pesquisa e desenvolvimento.
Deste último,
a plataforma robótica Stuart com dois graus de liberdade pode ser distinguida. A instalação acadêmica foi projetada para testar algoritmos de controle para manter a bola no centro do site (você pode ver o sistema em ação
neste vídeo ).
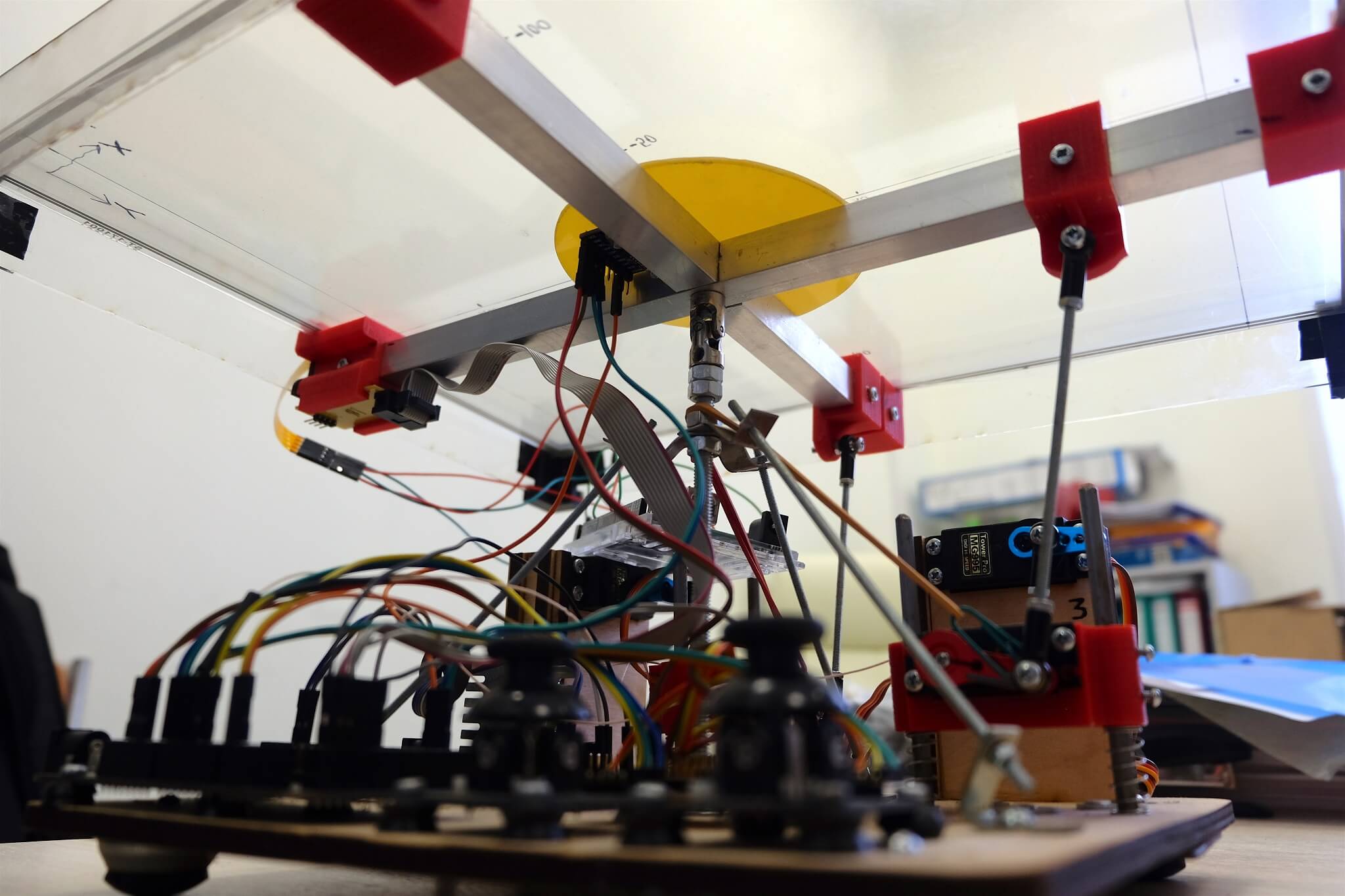
O complexo robótico consiste em uma plataforma retangular com um substrato de sensor resistivo que determina as coordenadas da bola. Os eixos de acionamento são fixados a ele usando uma junta giratória. Essas unidades alteram o ângulo da plataforma de acordo com os sinais de controle recebidos do computador via USB e não permitem que a bola role para fora.
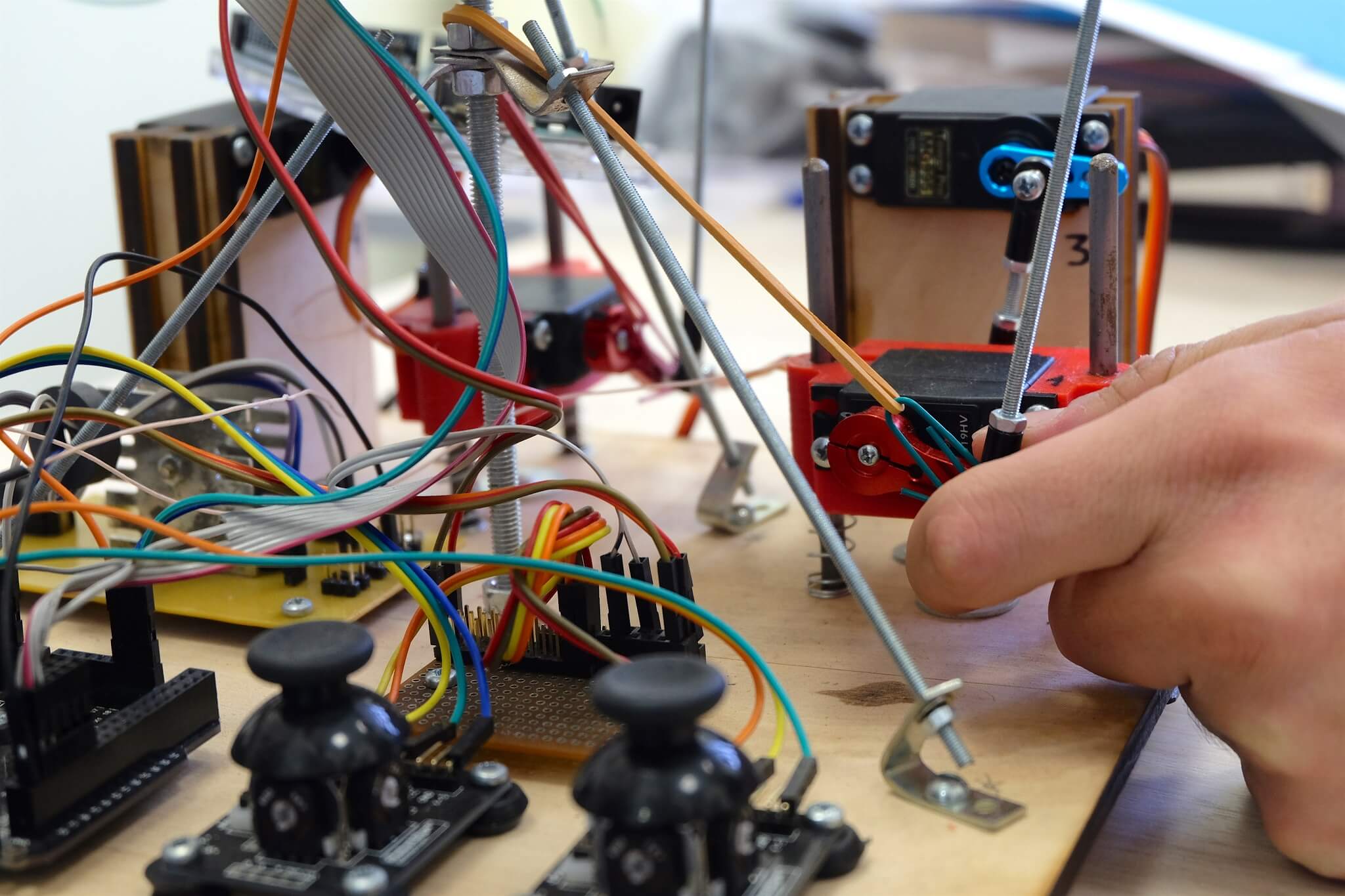
O complexo possui servos adicionais que são responsáveis por compensar distúrbios. Para a operação desses inversores, a equipe do laboratório desenvolveu algoritmos especiais que “suavizam” vários tipos de interferência, como vibração ou vento.
Além disso, no parque de robôs do laboratório, há um
centro de pesquisa
KUKA youBot , que é um braço robótico de cinco elos montado em uma plataforma móvel com rodas omnidirecionais.

O KUKA youBot testou algoritmos de
controle adaptativo para rastrear um alvo em movimento . Eles usam um sistema de visão baseado em uma câmera digital e procedimentos de processamento de vídeo. A base deste projeto é a pesquisa no campo do controle adaptativo de sistemas não lineares, conduzida pela equipe do laboratório.
Os algoritmos de controle são usados para compensar influências externas que atuam nos links do robô. Como resultado, a máquina é capaz de segurar a ferramenta de trabalho em um ponto fixo no espaço e movê-la de forma estável ao longo de uma determinada trajetória.
Um exemplo de projeto implementado com base no robô KUKA youBot é uma
sensação de momento de força sem sensor. Juntamente com a empresa britânica TRA Robotics, desenvolvemos um algoritmo que nos permite avaliar a força da interação da ferramenta de trabalho com o ambiente sem sensores de torque caros. Isso permitiu ao robô executar operações mais complexas sem recorrer a sistemas externos.

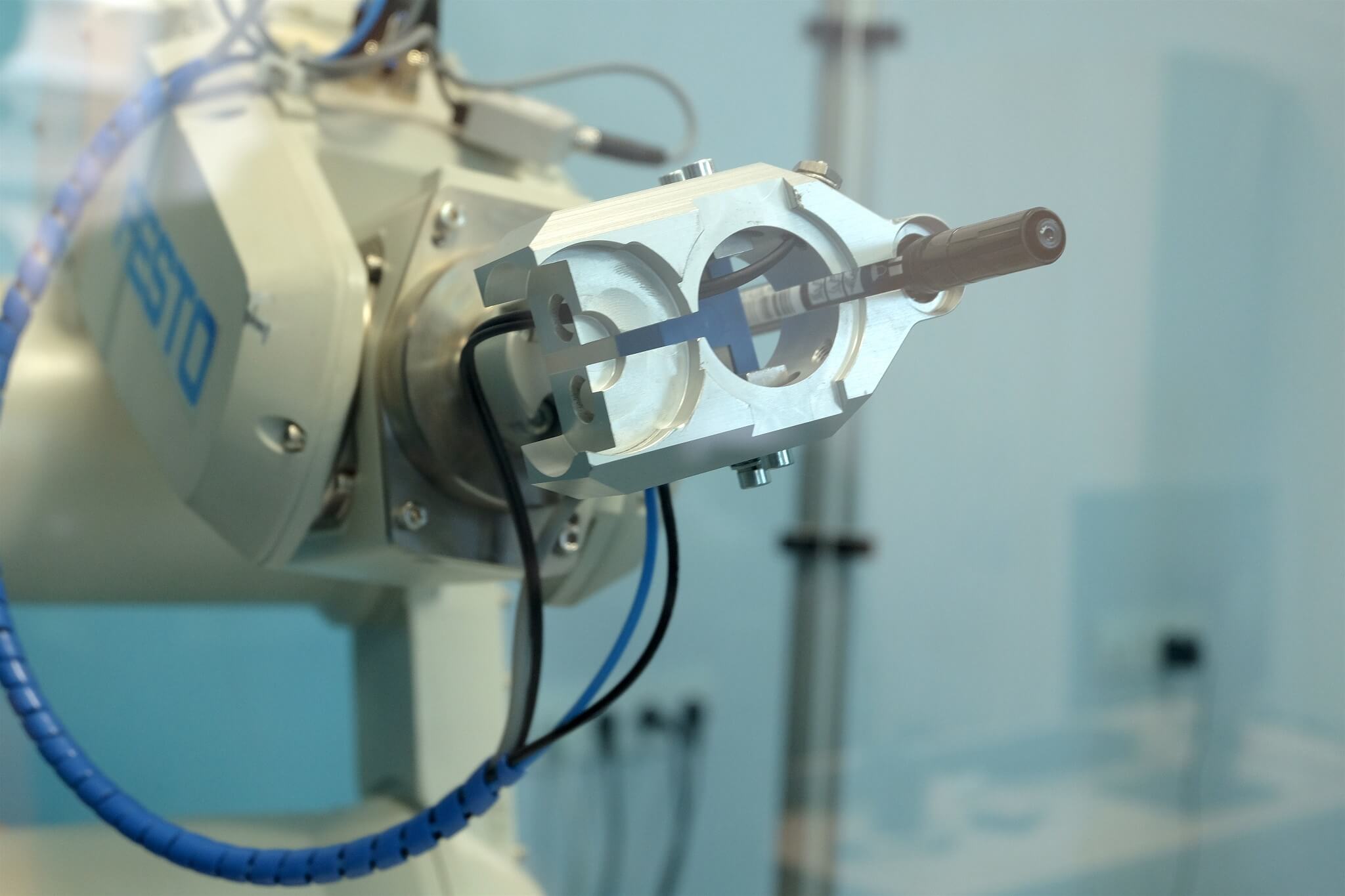
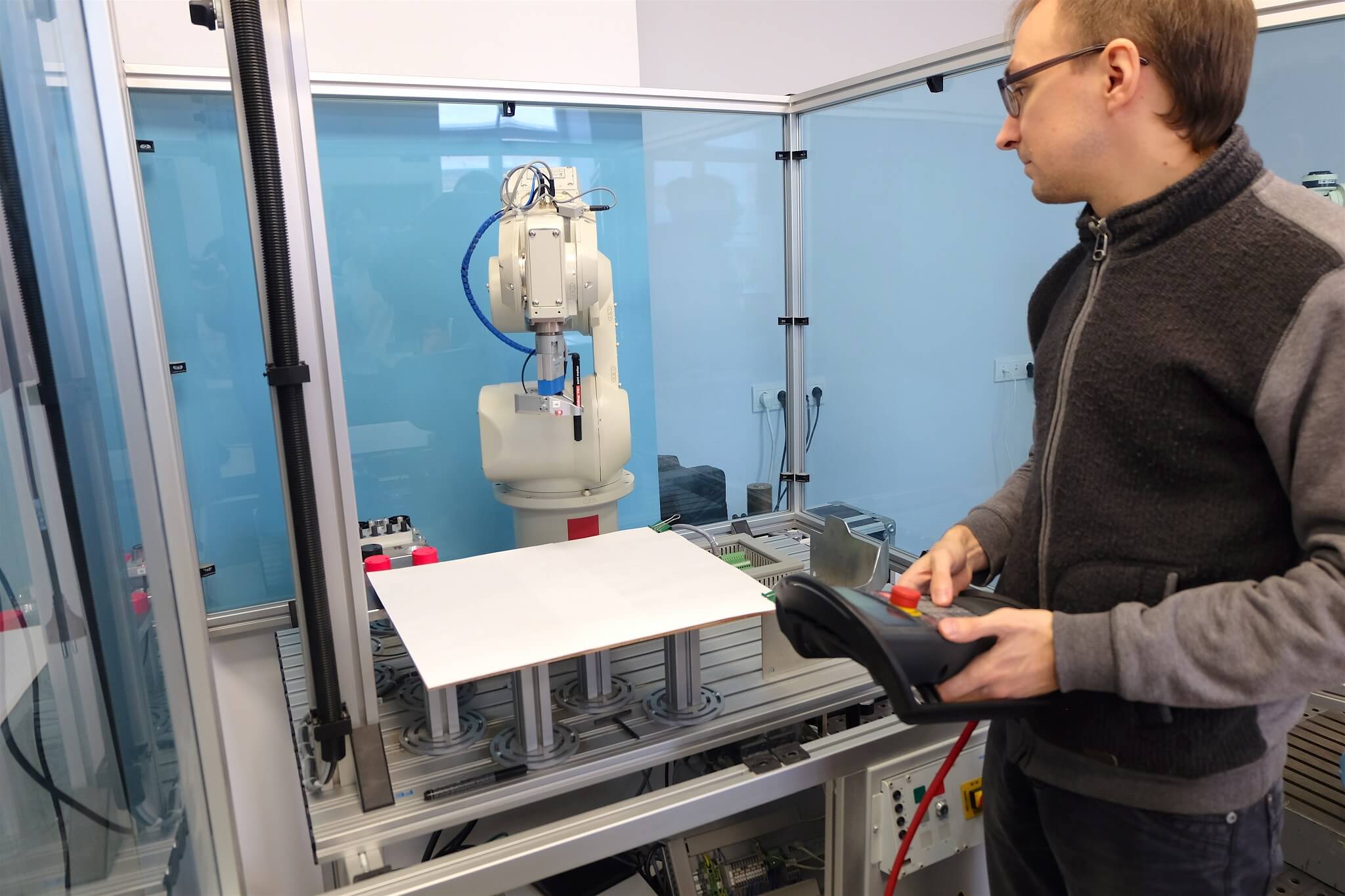
Outro exemplo de instalação robótica em laboratório é a
célula de visão de robô FESTO . Este complexo é usado para
simular operações tecnológicas na produção, como soldagem. Para implementar esse cenário, a tarefa do planejamento de movimento é feita: uma ferramenta de soldagem de simulação ignora o contorno de uma peça de metal.
Além disso, a célula está equipada com um sistema de visão e é capaz de resolver as tarefas de classificação de peças por cor ou forma.
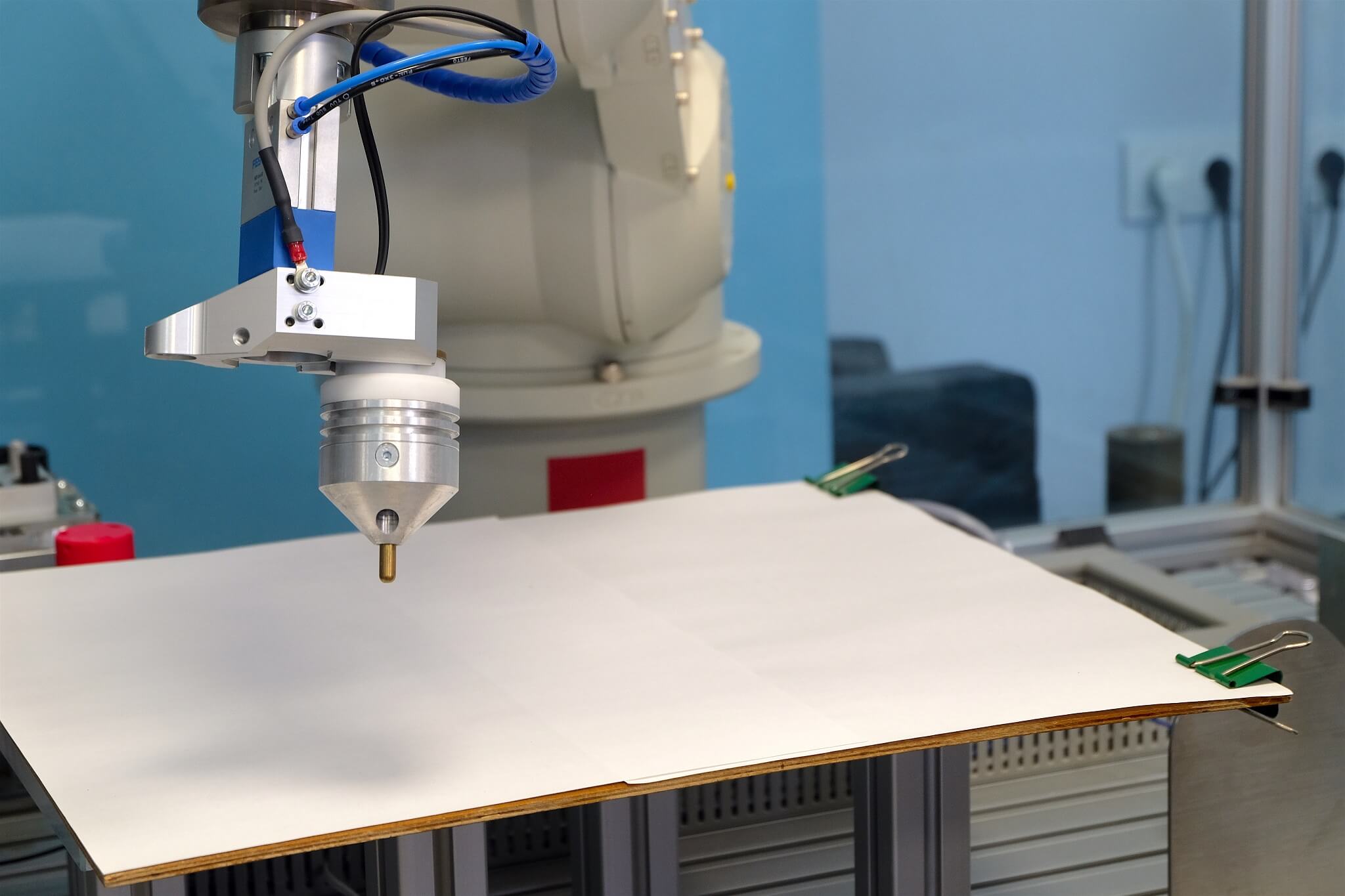
O projeto, baseado na célula robótica FESTO Robot Vision Cell com o robô industrial Mitsubishi RV-3SDB, resolve as tarefas de planejamento de movimento.
Ajuda a simplificar o processo de interação do operador com o controlador do robô ao programar caminhos complexos. A idéia é programar automaticamente os movimentos da ferramenta do robô usando os contornos mostrados no bitmap. Basta carregar um arquivo no sistema, e o algoritmo organizará independentemente os pontos de referência necessários e compilará o código do programa.
Na prática, a solução resultante pode ser usada para gravar ou desenhar.
Temos um
vídeo no canal em que nosso "artista robô" retratou um retrato de A. S. Pushkin. Além disso, a tecnologia pode ser usada para soldar peças de formas complexas. De fato, é um complexo robótico que resolve problemas industriais em condições de laboratório.
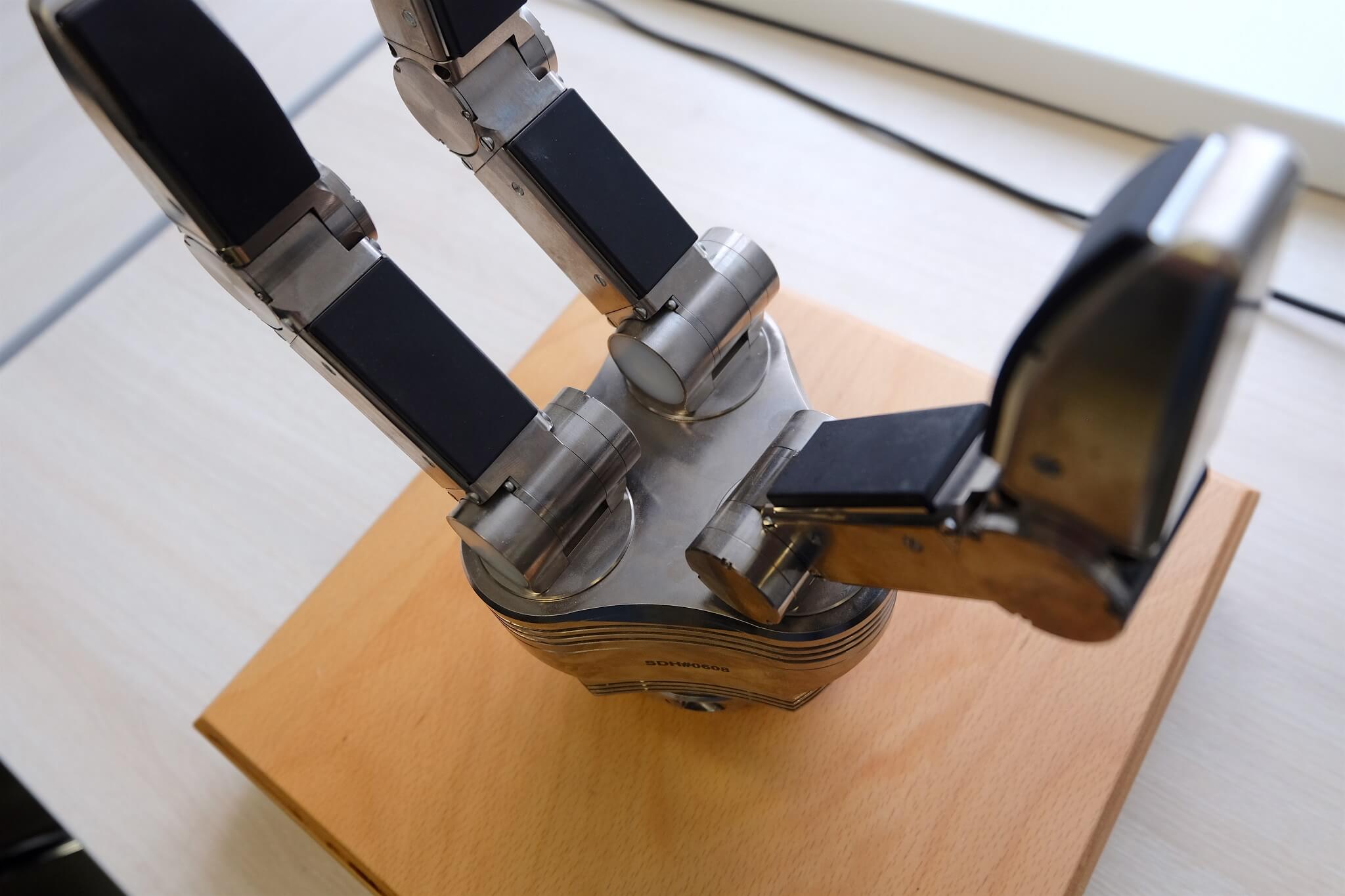
O laboratório também possui uma pinça de três dedos equipada com sensores de pressão localizados na superfície interna dos dedos.
Esse dispositivo permite o manuseio de objetos frágeis quando é importante controlar com precisão a força de preensão para evitar danos.
O laboratório possui um
modelo robótico de um vaso de superfície , projetado para testar sistemas de posicionamento dinâmico.
O modelo está equipado com várias unidades executivas, além de hardware de comunicação por rádio para transmitir sinais de controle.

Existe uma piscina na sala de laboratório, na qual é verificada a operacionalidade dos algoritmos de controle
para manter a posição de um pequeno modelo de uma embarcação de superfície com compensação de deslocamentos longitudinais e transversais.
Atualmente, está planejado organizar um grande pool para testes em larga escala com cenários complicados.

Trabalhar com parceiros e planos
Um de nossos parceiros é a empresa britânica TRA Robotics. Juntos,
estamos trabalhando para melhorar os algoritmos de controle de robôs industriais para uma empresa de manufatura digital. Nessa empresa, todo o ciclo de produção: do desenvolvimento à fabricação de produtos industriais, será realizado por robôs e sistemas de IA.
Outros parceiros incluem a preocupação da Elektropribor, juntamente com a qual estamos
desenvolvendo sistemas mecatrônicos e robóticos. Nossos alunos ajudam a preocupação no campo da instrumentação, desenvolvimento de software e tarefas de produção.
Também
cooperamos com a General Motors,
desenvolvemos robótica com o InfoWatch. Além disso, a equipe do laboratório interage estreitamente com a empresa
Navis JSC , que implementa projetos para o desenvolvimento de sistemas de posicionamento dinâmico para navios de superfície.
O
Laboratório de Robótica Juvenil opera com base na Universidade ITMO, onde crianças em idade escolar se preparam para competições de classe mundial. Por exemplo, em 2017, nossa equipe
venceu a Olimpíada Mundial de Robôs na Costa Rica e, no verão de 2018, nossos alunos
receberam dois prêmios na Olimpíada de toda a Rússia para crianças em idade escolar.
Planejamos atrair mais parceiros do setor e educar a geração mais jovem de cientistas russos. Talvez eles desenvolvam robôs que complementem organicamente o mundo das pessoas e executem tarefas mais rotineiras e perigosas nas empresas.
Visitas fotográficas de outros laboratórios da Universidade ITMO: