Olá, queridos participantes e convidados do site. Vou tentar ser o mais breve possível neste tópico. O boom da robótica nos últimos anos, muita atenção a este tópico não poderia me deixar indiferente.
Perseguindo o sonho de infância de criar um robô, cheguei ao fórum
cyber-place.ru em busca de informações há um ano (não considere isso para publicidade). Nas minhas fantasias mais loucas, pensei em criar meu próprio robô de telepresença, com a capacidade de mover-se no espaço, vídeo e comunicação de áudio bidirecional, com controle remoto por telefone ou computador. Eu fui inspirado pelo modelo baseado no roteador tplink 3020 com firmware Cyberwrt. O desconhecimento do tópico e as grandes lacunas na educação não interferiram no meu desejo maníaco de obter um resultado, como resultado de tentativa e erro e eletrônica queimada.
Após quase um ano de “aprendendo com meus erros”, os primeiros resultados apareceram, uma máquina com a capacidade de controlar via Internet baseada no Cyberbot -3, pela qual muitos graças a seus desenvolvedores, os caras fizeram um ótimo trabalho! (Para mim, programar e criar software é apenas espaço!) Muitas pessoas fizeram a máquina de escrever, o equipamento e as instruções detalhadas estão nas vastas extensões da Internet. Portanto, para insistir nisso, não vejo razão.

Além disso, surgiu a necessidade de autonomia do dispositivo, construído (a partir de meios improvisados) uma "estação de carregamento" e contatos seguros com mola na frente do robô. A energia principal do robô é selecionada 4.2V para a possibilidade de carregamento a partir de uma fonte de alimentação de 5V. Para aumentar a corrente de carregamento, dois módulos TP4056 foram soldados em paralelo. Gerenciava toda essa economia via Internet, por telefone, através de um navegador.


Tendo jogado o suficiente com o modelo que decidi, preciso seguir em frente. Infelizmente, não encontrei uma maneira (acho que ainda está tudo à frente) para gerenciar o dispositivo com base em um, o controlador principal.
Como este equipamento não permite comunicação de áudio bidirecional, não consegui encontrar uma maneira melhor de como usar a câmera de CFTV DS-2CD2432F-IW, esta câmera com o suporte de software de terceiros no android (tinyCam PRO) permite monitoramento de vídeo e áudio bidirecional. Inicialmente, havia uma idéia (louca) de se conectar ao conector de engenharia da câmera para ler uart, use o software padrão da câmera para controlar o movimento do carrinho robótico. Use câmeras PTZ para se mover. Eu planejava considerar quais equipes estavam deitada no uart quando eu pressionava esquerda, direita, baixo, para cima por uma câmera que não é rotativa e, em seguida, conduzia esses comandos para o uart arduino nano, que deveria controlar os motores, então eu queria resolver o principal problema para mim, não escrevendo software. A ideia não teve êxito, o fabricante bloqueou esses comandos, exceto a mensagem "ptz not support" quando você clica nos botões PTZ no uart, nada veio.
Portanto, a “câmera sobre rodas” e não o robô de telepresença foi o resultado de meus esforços.
Para controlar o dispositivo pelo telefone, uso a capacidade de abrir vários aplicativos no Android, as chamadas "janelas flutuantes" (em versões posteriores, ele funciona sem aplicativos de terceiros, como aplicativos flutuantes). Você precisa abrir dois aplicativos, o tinyCam PRO para acessar a interface da câmera e um navegador para acessar o controle do carrinho.
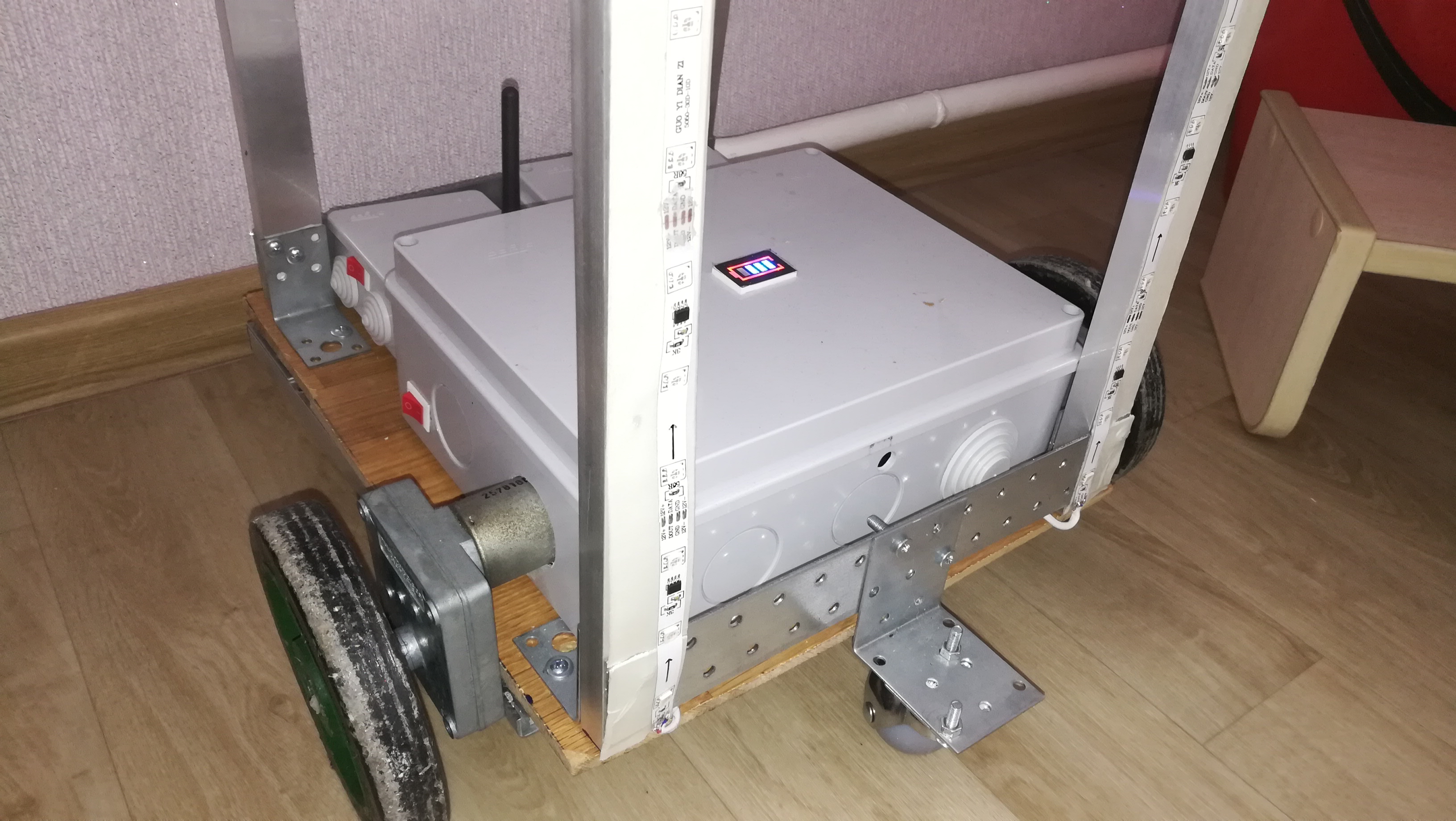
Portanto, o resultado: uma caixa de junção elétrica como uma caixa para hospedar equipamentos tp link 3020 com firmware CyberWRT, uma antena soldada, + 10dB no meu caso, um arduino nano recebendo comandos uart da interface da web do roteador, uma blindagem de motor monstro para controlar caixas de engrenagens de motores removidas de máquinas caça-níqueis antigas.

A altura do robô é de 165 cm, o peso é de cerca de 10 kg, a potência é de 12,6V (conjunto de lítio 18650 + controlador de carregamento com balanceador), uma lata de maionese em vez da cabeça em que a câmera está escondida, o alto-falante em tempo integral da câmera é substituído por um alto-falante de 5 watts para que eu possa ouvir melhor . Olhos - dois LEDs inseridos nos refletores sob as luzes, os olhos são controlados pela interface do cyberbot, duas faixas de LEDs de endereço e um controlador mini arduino pro mini para controlá-las (graças a Alex Guyver, seu projeto “lâmpada de incêndio” foi rasgado).
A fita é controlada através do módulo de relé, sob comando, também através da interface do cyberbot.
A aparência desajeitada se deve ao fato de o robô ter vestido e parabenizado os colegas em 8 de março. (O robô dirigiu-se para a música do terminador, controlado por mim de um local isolado, ficou confuso com a música leve e com a inclusão suave de LEDs, o público ficou encantado).


No futuro, pretendo dominar o trabalho com o manipulador, remover todo o “desnecessário”, selecionar o equipamento necessário (substituir o roteador e o arduino pelo ESP32) e o software para que até minha avó possa gerenciar o “design” :)) O tópico não foi totalmente divulgado, não cobri muitos pontos para não adiar o longo post, se você gostou do tópico, aguardo suas críticas e conselhos.