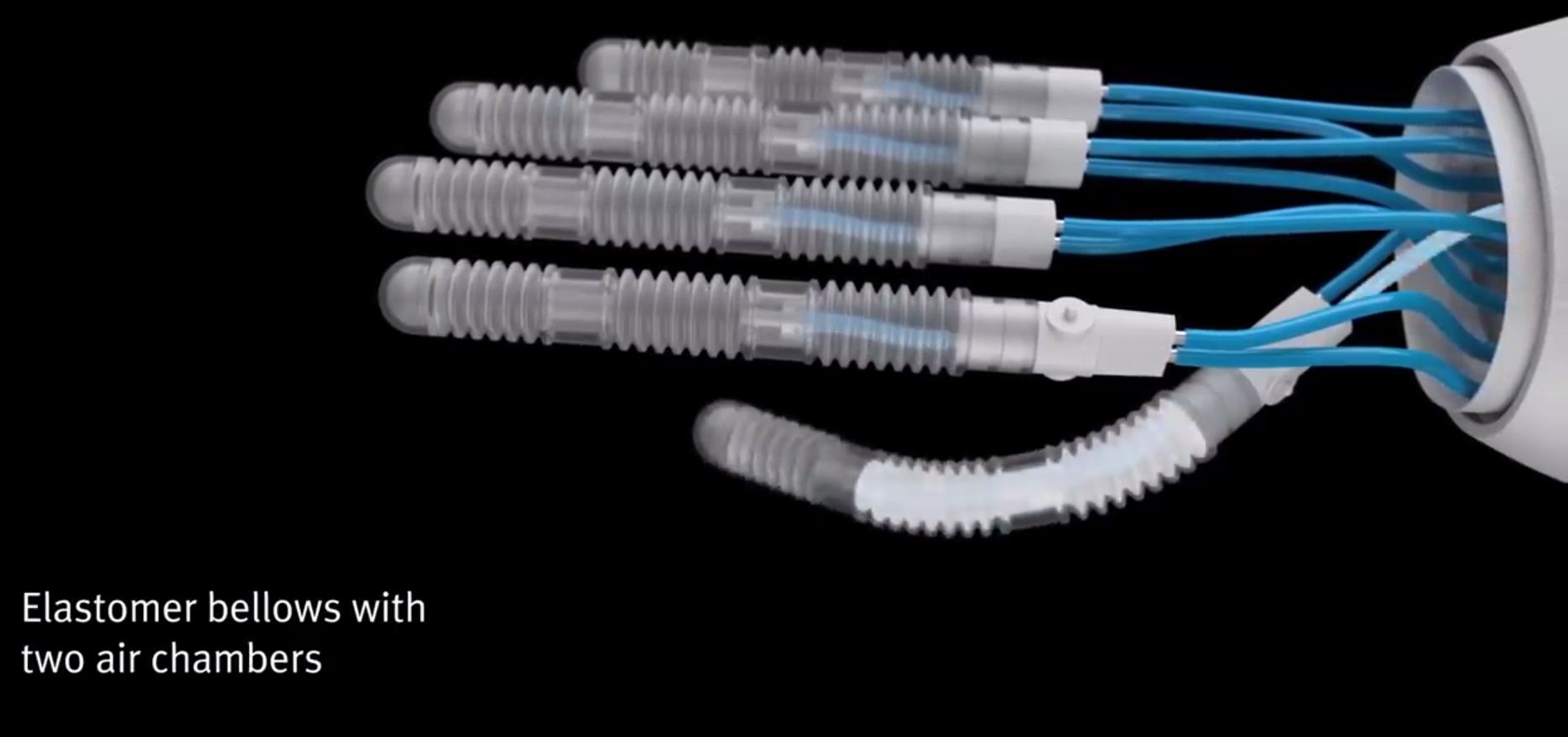
Não há estrutura esquelética nesta solução, a mão é feita de materiais macios e flexíveis, as falanges dos dedos são feitas de tecido tridimensional com sensores táteis e condutores flexíveis que podem ser dobrados usando módulos pneumáticos. Um nó com válvulas é instalado no pulso, que aciona os elementos da mão, se necessário, com movimentos motores finos.
Os movimentos do BionicSoftHand são controlados pela inteligência artificial, capaz de aprender por tentativa e erro, e após a adaptação à tarefa, rápida e autonomamente, executa as ações necessárias com os objetos, semelhante à maneira como uma pessoa faz.

Link para a descrição do fabricante da solução
BionicSoftHand aqui .
 O braço robótico BionicSoftHand está equipado com:
O braço robótico BionicSoftHand está equipado com:- foles infláveis, em torno dos quais existe um tecido tridimensional feito de impressão 3D feita de fibras elásticas, que se dobra junto com os movimentos da mão quando o ar é introduzido no fole, semelhante ao trabalho dos músculos e tendões;
- módulos rotativos pneumáticos;
- terminal de válvula para 24 válvulas piezo;
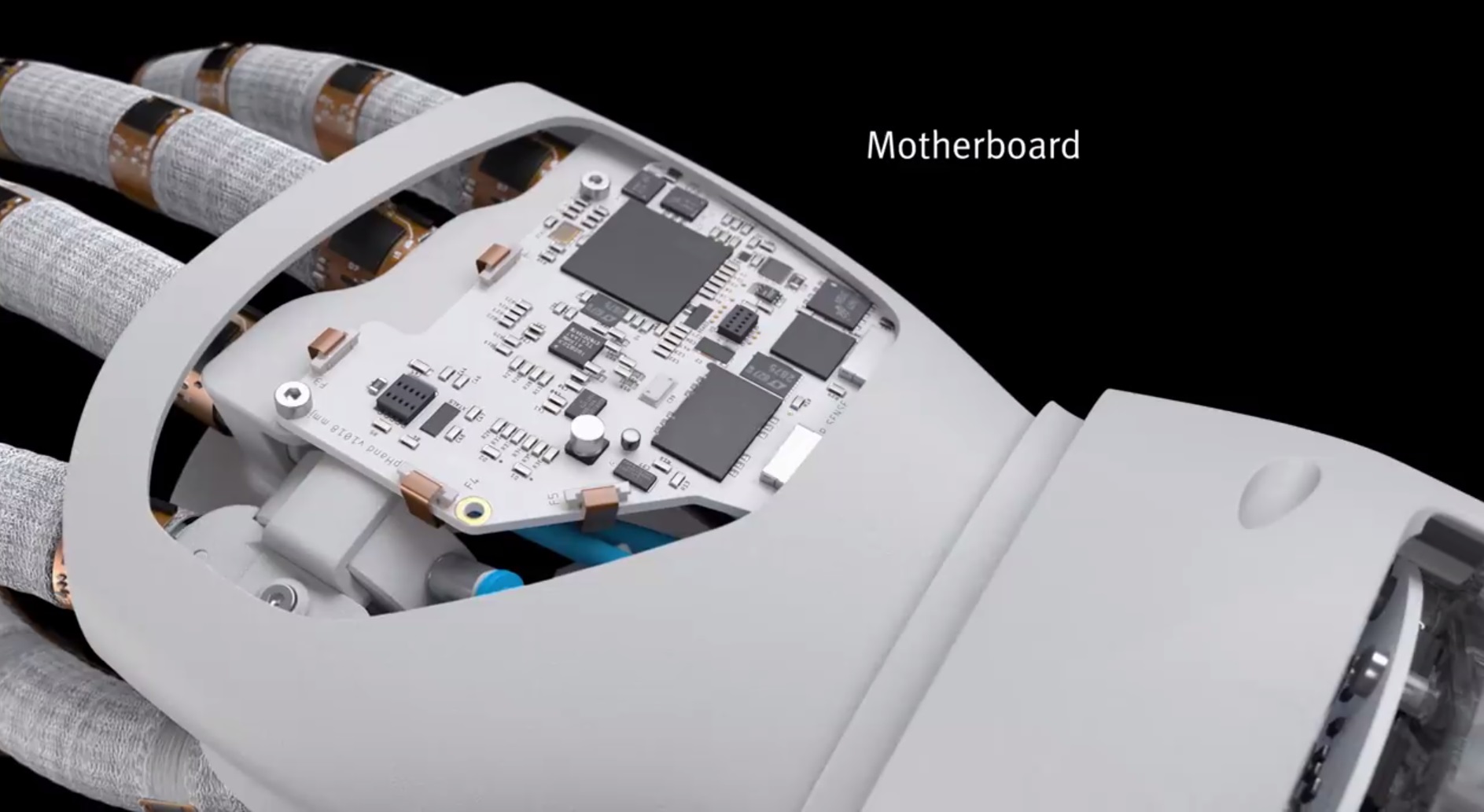
- uma placa-mãe a bordo, inclusive para controle de movimento autônomo;
- sensores de inércia (movimento) e força (instalados em dedos macios), que também são criados com base em materiais flexíveis e capazes de dobrar no momento do movimento;
- um módulo de IA de autoaprendizagem, capaz de calcular independentemente a melhor maneira de interagir com diferentes objetos e executar várias ações e, no menor tempo possível, receber dados de câmeras 3D com percepção de profundidade para analisar objetos e movimentos.
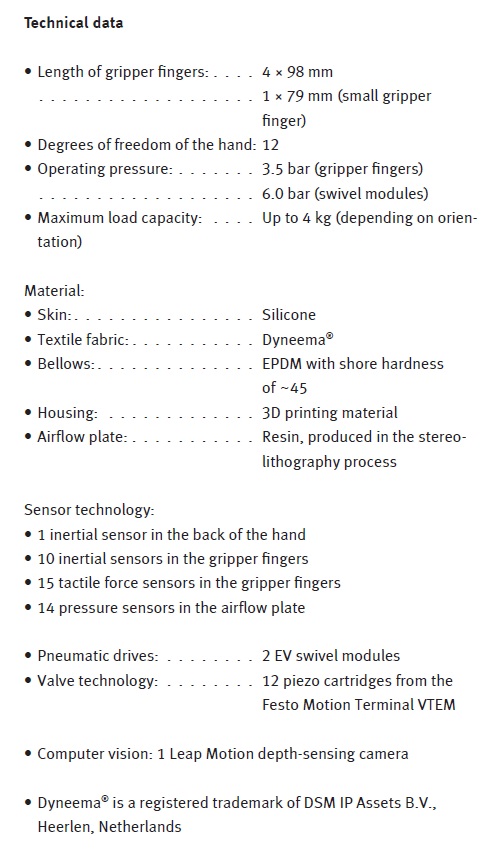
Características técnicas dos componentes do dispositivo:


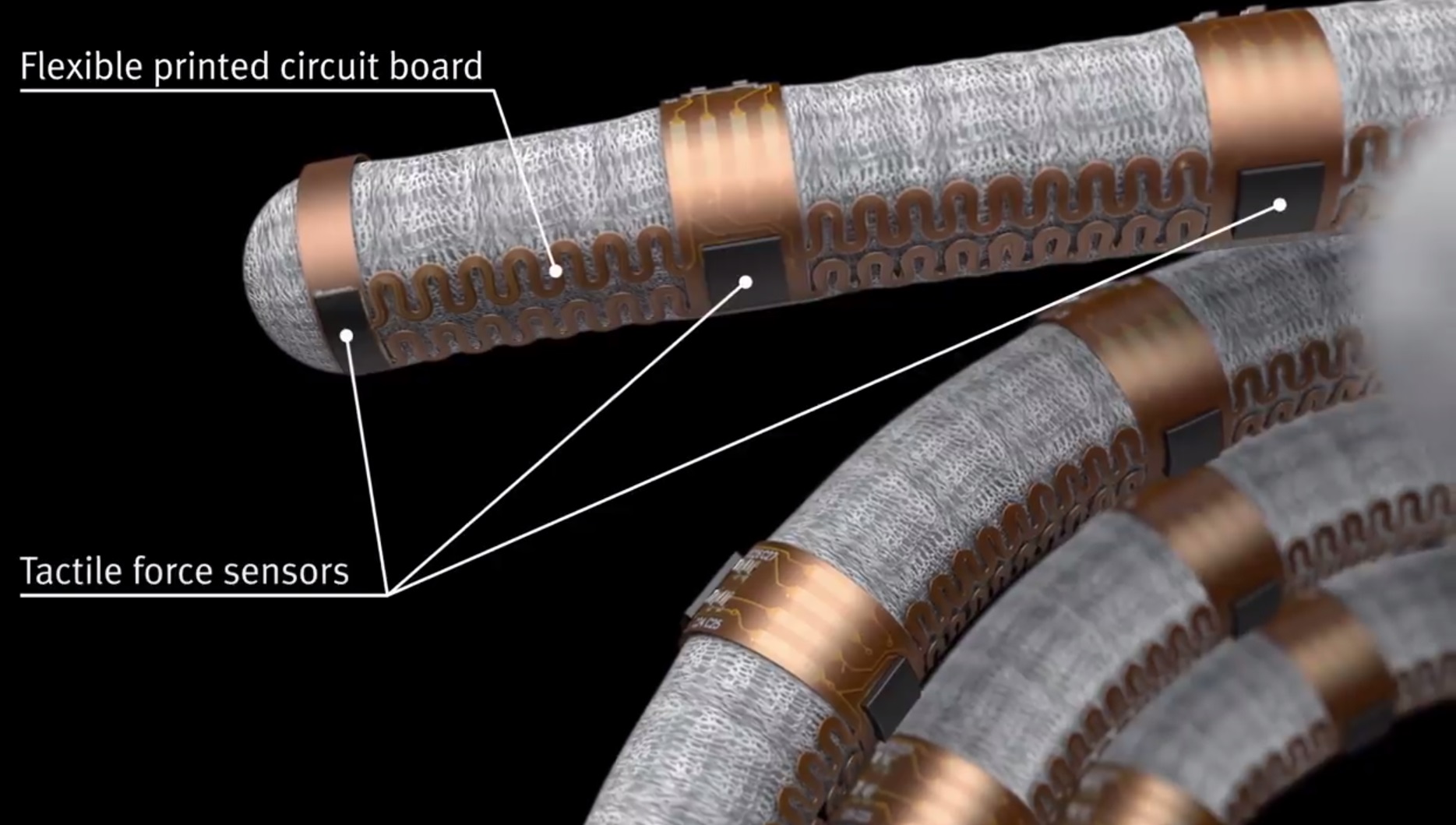





Uma matriz de sensores de toque nos dedos da mão fornece feedback aos sistemas de controle da mão (com os componentes da IA), relatando os movimentos da mão e dos dedos, bem como os métodos e movimentos em contato com objetos diferentes, a mesma IA analisa as informações sobre se está correta um objeto está localizado na mão para sua manipulação, usando uma matriz de percepção de contato, imitando a sensação de toque de uma pessoa. Além disso, a IA calcula que esforços devem ser feitos para manter o sujeito, que tipo de sequência motora deve ser executada para as posições e movimentos dos dedos, qual a largura para abrir a palma da mão e assim por diante.

Inicialmente, o ponteiro BionicSoftHand não foi programado para nenhum movimento específico e a IA conectada ao seu painel de controle é treinada no processo de execução de tarefas de teste usando a tecnologia de aprendizado paralelo, criando em um ambiente virtual, com o tempo, permitindo que o braço robótico se torne "mais inteligente", mas para soluções de novos problemas para usar combinações de movimentos que já foram estudadas e verificadas com ações reais, que são otimizadas para novas tarefas.

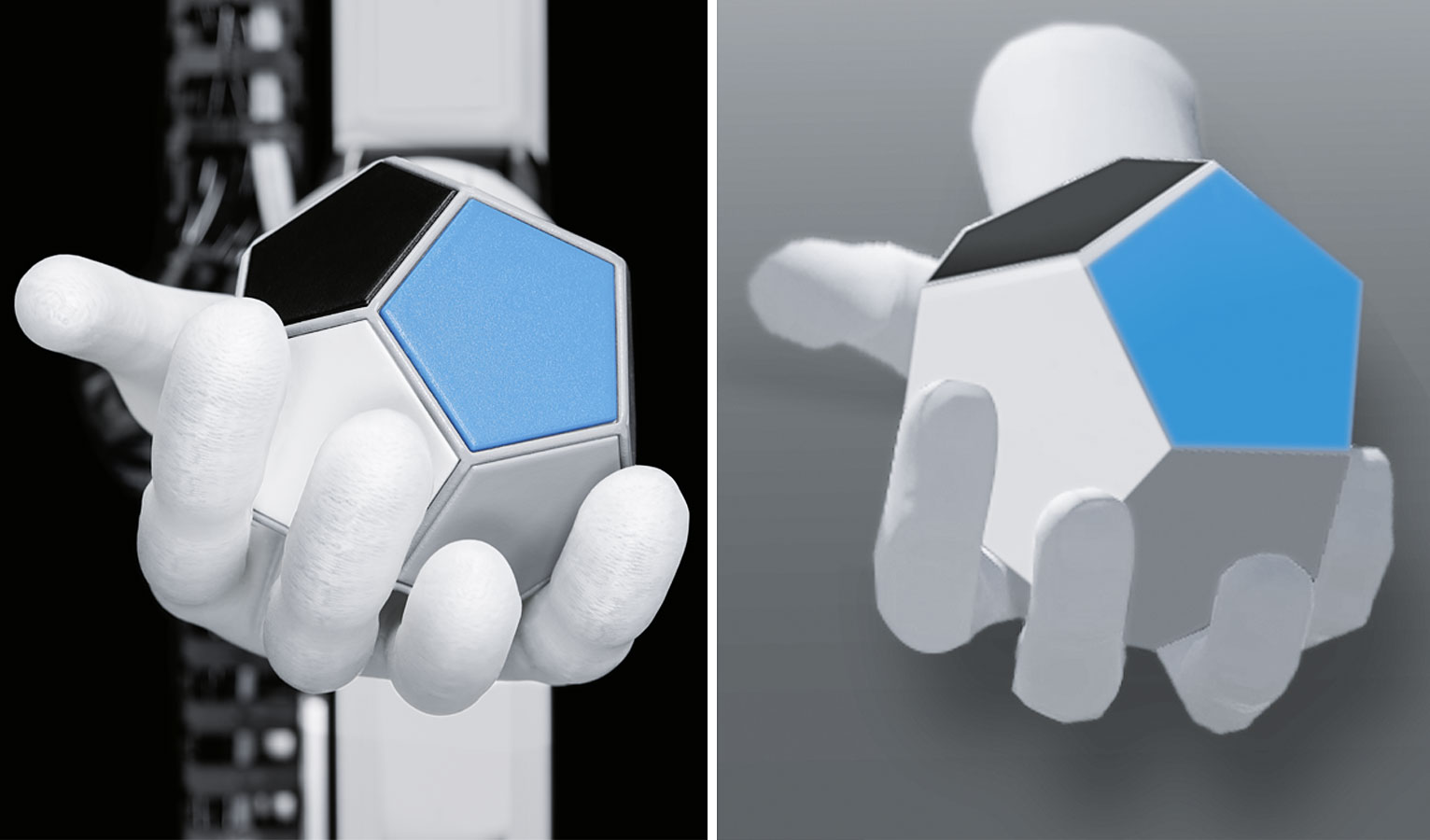

No vídeo de demonstração abaixo, as IAs com o braço robótico receberam a tarefa de mover o objeto de 12 lados colocado na mão para que um determinado rosto olhasse para cima, sem explicar as etapas para concluir esta tarefa.
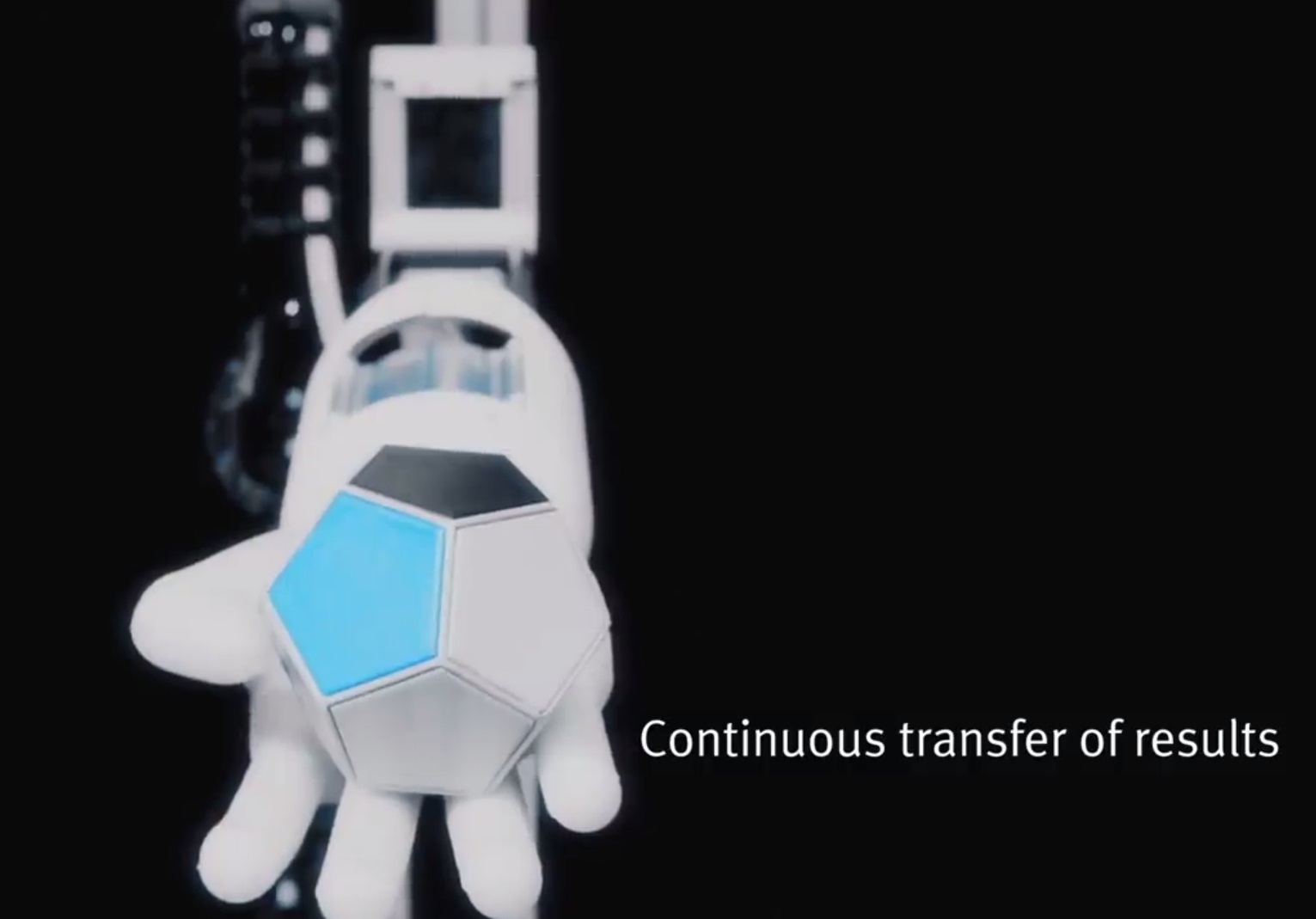
Primeiro, usando uma câmera 3D com percepção de profundidade, a IA cria uma cópia digital do objeto e a coloca em uma simulação virtual com muitas mãos virtuais que manipulam o objeto até que a combinação correta seja selecionada.
Em seguida, o AI calcula as opções para encontrar e executar rapidamente as ações ideais com o assunto e as executa na realidade, controlando os elementos do BionicSoftHand.
Componentes para criar a eletrônica Evgeny Veltistov cada vez mais perto da realidade.