Para beneficiar as pessoas, os robôs precisam aprender a andar como nós.

Por muitas décadas, os robôs conseguiram andar com duas pernas. Hoje, os robôs humanóides mais avançados podem andar em superfícies planas e inclinadas, subir e descer escadas e caminhar por terrenos acidentados. Alguns até sabem pular. Mas, apesar desse progresso, os robôs com pernas ainda não podem ser comparados em termos de destreza, eficiência e confiabilidade com pessoas e animais.
Os robôs ambulantes existentes consomem energia e gastam muito tempo em treinamento. Muitas vezes eles falham e quebram. Para se tornar os assistentes robóticos com os quais sonhamos há tanto tempo, essas máquinas terão que aprender a andar da maneira que fazemos.
Definitivamente, precisamos criar robôs com pernas, porque nosso mundo é projetado para pernas. Passamos por gargalos, contornamos obstáculos, subimos e descemos as escadas. É difícil para os robôs sobre rodas ou lagartas se deslocarem nos lugares que adaptamos ao nosso corpo.
E muitos robôs humanóides têm pernas que se parecem com as nossas - com quadris, joelhos, tornozelos e pés. Mas é aí que as semelhanças terminam. Se, por exemplo, compararmos a força com que o robô pressiona a Terra com a mesma nos seres humanos, acontece que muitas vezes eles são muito diferentes. A maioria dos robôs humanóides, originários dos primeiros exemplos de braços robóticos industriais, controlam os membros para que eles se movam com precisão ao longo de trajetórias predeterminadas. No entanto, mover-se sobre duas pernas exige não tanto controle de posição quanto controle de força e implica uma ampla gama de flexibilidade e elasticidade - conhecidas na robótica como conformidade, o que permite lidar com contatos inesperados.
Muitos grupos de pesquisa estão tentando criar robôs menos rígidos que podem se mover de uma maneira mais dinâmica e humana. O mais famoso entre esses projetos provavelmente será o
Atlas da
Boston Dynamics , um humanóide capaz de correr em solo duro e mole, pulando troncos e até fazendo backflips. Mas, novamente, comparando o movimento dos robôs mais complexos com os animais, vemos que as máquinas não são suficientes.
O que estamos perdendo? A tecnologia não é o maior problema: os motores são potentes o suficiente, os materiais são fortes o suficiente, os computadores são rápidos o suficiente. A limitação, aparentemente, é a nossa compreensão de como a caminhada funciona.
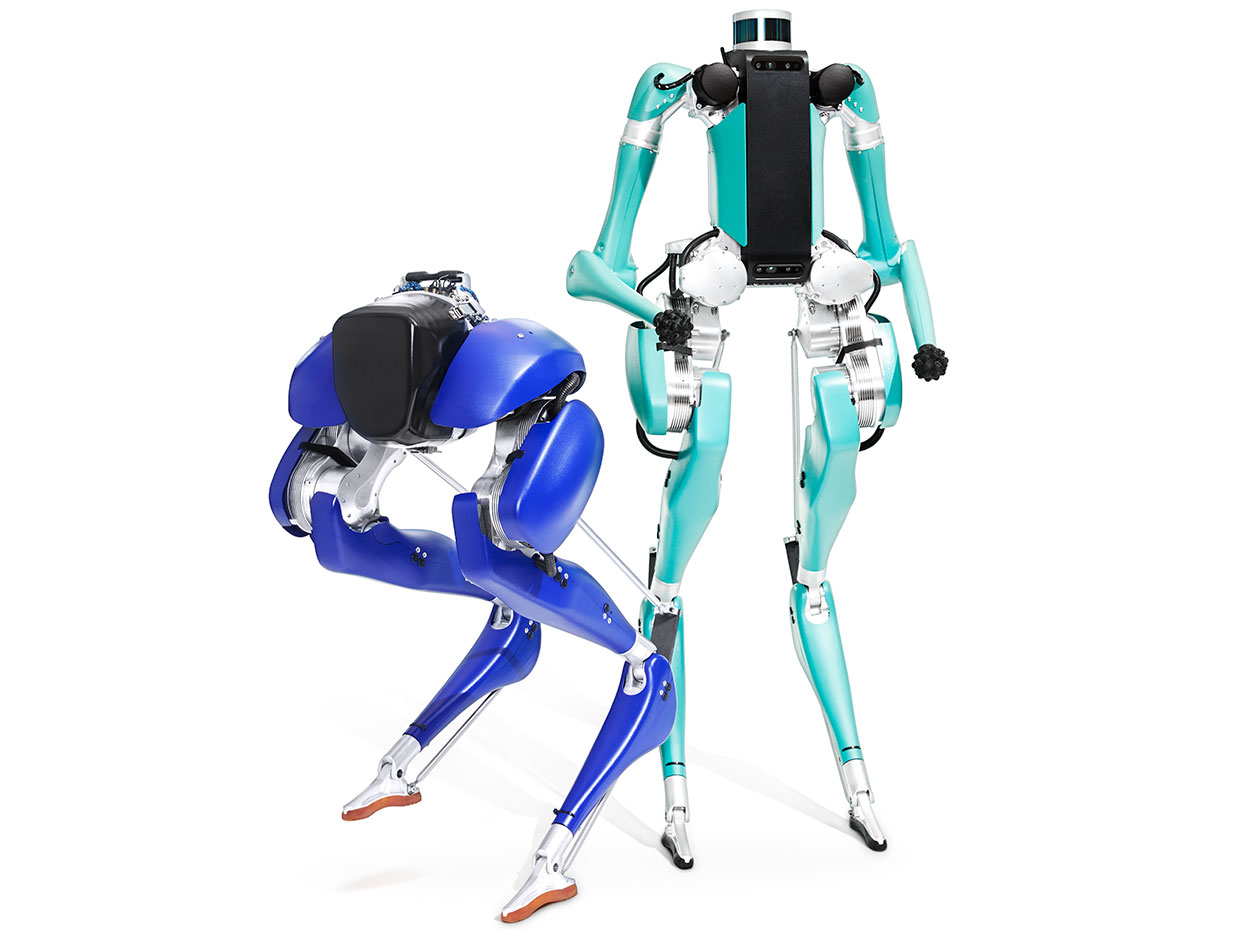 Cassie Robots (à esquerda) e Digit da Agility Robotics
Cassie Robots (à esquerda) e Digit da Agility RoboticsNo Laboratório de Robótica Dinâmica da Universidade do Oregon, conduzi uma equipe de pesquisadores tentando descobrir os princípios básicos da caminhada e aplicar essas descobertas aos robôs. Também sou co-fundador e diretor de tecnologia da
Agility Robotics , uma startup em Albany, Oregon, que estuda o uso comercial de robôs ambulantes. Em 2017, abrimos o mundo para Cassie, uma plataforma de duas pernas que vendemos para várias equipes de pesquisa. Em breve, nosso novo robô poderá entrar no mundo: as pernas de Digit são semelhantes às de Cassie, mas ele tem sensores e um par de mãos, que ele usa para estabilizar e no futuro para manipulações.
Tanto no laboratório quanto na empresa, estamos trabalhando para criar um futuro no qual os robôs possam ir onde quer que as pessoas possam. Acredito que um dia os robôs com pernas dinâmicas poderão ajudar a cuidar dos idosos em sua casa, participar de operações de resgate em caso de incêndio e terremoto e entregar pacotes em suas casas. Os robôs para as pernas também permitirão a criação de exoesqueletos e próteses que ajudarão a aumentar a mobilidade das pessoas com deficiência. Eles finalmente trazem robôs de ficção científica para a realidade.
Alguns pássaros correm melhor do que voam, ou nem sequer voam. Avestruzes, perus, pintadas e codornas não podem voar como um falcão, mas rapidamente se movem a pé. Meus colegas do laboratório e Monica Daily, do Royal Veterinary College da Universidade de Londres, passaram inúmeras horas observando os pássaros andando e correndo pelo laboratório. Queremos entender como esses animais conseguem se mover com tanta agilidade e eficiência - e, no entanto, a maioria dessas máquinas de penas trabalha com sementes!
Em um experimento, uma pintada corre ao longo de um caminho e depois pisa em um buraco disfarçado de guardanapo. O animal não sabia que entraria em um buraco com cerca da metade do comprimento de suas pernas; no entanto, não tropeçaria, e sua perna estendida e adaptada ao sulco da corrida. Nesse processo, algo notável acontece: o cérebro do pássaro não precisa sentir e reagir à indignação, pois suas pernas o enfrentam.
Isso fornece uma idéia importante para os desenvolvedores de robôs: se você criar um robô primeiro e depois decidir programá-lo para movimentos ágeis, não terá êxito. Como é o caso das aves da Guiné, a destreza de um robô virá principalmente das propriedades mecânicas de seu corpo, daquilo que a robótica chama de dinâmica passiva. E é negligenciado na maioria dos projetos para o desenvolvimento de robôs com pernas. Ao desenvolver cuidadosamente a dinâmica passiva do robô em paralelo com o preenchimento do software, trazendo-as para um sistema integrado, você aumenta as chances de um robô se aproximar das características de um animal.
Vale ressaltar que, embora nos inspiremos nos animais, não reproduzimos a forma do pé do pássaro ou a construção de músculos e ossos no pé humano. Queremos entender a física do movimento animal e dele derivar um modelo matemático abstrato que pode ser entendido, verificado em simulações de computador e incorporado em robôs reais. Como na criação de robôs, usamos metal e eletrônicos, em vez de ossos e cérebros, eles podem ser muito diferentes dos animais, usando a mesma física.
Um dos modelos matemáticos mais simples descreve uma massa pontual (tronco) conectada a um par de molas ideais (pernas). É claro que esse modelo de massa de mola é simplificado; assemelha-se a um homenzinho de traços e não leva em conta a presença de articulações nos pés, ou o fato de que os pés não tocam o chão em pontos isolados. Ainda assim, o modelo de massa de mola pode produzir resultados inesperados. Em simulações, ela pode reproduzir quase todos os passeios que pessoas e animais usam para caminhar e correr.
 Primeiros passos: as pernas do robô ATRIAS não são humanas, mas foi a primeira máquina a mostrar uma marcha semelhante à humana
Primeiros passos: as pernas do robô ATRIAS não são humanas, mas foi a primeira máquina a mostrar uma marcha semelhante à humanaPara testar o modelo de massa de mola, desenvolvemos o robô bípede
ATRIAS , cujo nome é o acrônimo de nossa suposição básica:
Suponha que o robô seja uma esfera [imagine que o robô seja uma esfera]. A idéia era que a dinâmica passiva do robô pudesse recriar o modelo de massa pontual com pernas de mola com a maior precisão possível.
Cada perna é feita de hastes leves de fibra de carbono montadas em um paralelogramo, conhecido como elo de quatro articulações.
Essa estrutura minimiza a massa das pernas e sua inércia, aproximando o sistema do modelo de massa de mola. Equipamos a parte superior das pernas com molas de fibra de vidro, realizando fisicamente a “mola” do modelo, processando colisões com o solo e armazenando energia mecânica.
A princípio, o ATRIAS mal suportava, e nós o apoiamos com uma trela superior. Mas aprimoramos o controlador que rastreia a velocidade e a inclinação do corpo, e o robô começou a dar os primeiros passos e depois andar livremente pelo laboratório. Então ATRIAS aprendeu a se recuperar de distúrbios - em um experimento, meus alunos atiraram bolas nele. Também levamos o ATRIAS ao campo de futebol da universidade, aceleramos para uma velocidade máxima de 7,6 km / h e paramos rapidamente.
Para entender melhor o que o robô estava fazendo, imagine que você estava com os olhos vendados, andava sobre pernas de pau, e seu corpo estava enrolado em um tapete, e você não pode usar as mãos para se equilibrar. Você só pode ir além - foi o que a ATRIAS fez. Ele poderia até lidar com obstáculos, por exemplo, com um monte de lenha a caminho.
E, embora a destreza fosse um componente importante, também era muito importante economizar energia. Confirmamos a relação custo-benefício do robô medindo um parâmetro conhecido como custo de transporte [COT]. É definida como a razão entre o consumo de energia (potência) e o produto de peso e velocidade e é usada para comparar a eficiência energética de animais e máquinas em movimento. Quanto menor o COT, melhor. Em uma pessoa que anda, o SOT é de 0,2 e, em um robô humanóide comum, esse número é muito maior - de 2 para 3, de acordo com
algumas estimativas . Nossas experiências
mostraram que, no modo ATRIAS, o COT é de 1,13, o que demonstra a
eficácia dos robôs dinâmicos. E, de fato, alimentado por várias baterias de polímero de lítio - como as usadas em carros controlados por rádio - o ATRIAS poderia funcionar por cerca de uma hora.
Também
medimos a força com que o robô pressiona o solo. Colocamos ATRIAS pesando 72,5 kg (aproximadamente o tamanho de uma pessoa comum) em uma plataforma elétrica - essa ferramenta é frequentemente usada na medicina esportiva para medir a marcha de uma pessoa através da medição das forças de reação. Ao andar no robô, gravamos dados sobre as forças. Então, um dos meus alunos tomou o lugar de ATRIAS e gravamos seus passos. Tendo construído um gráfico da dependência da reação de suporte no tempo, vimos que ela coincide exatamente com o gráfico do robô. Até onde sabemos, esta é a implementação mais realista da dinâmica da marcha humana dos robôs atualmente.
Os resultados confirmaram que um simples sistema dinâmico de massa de mola pode ser implementado em um robô. Possui muitas propriedades úteis, como eficiência, confiabilidade e flexibilidade, e chega ao fundo da calçada. É hora de criar o próximo robô.
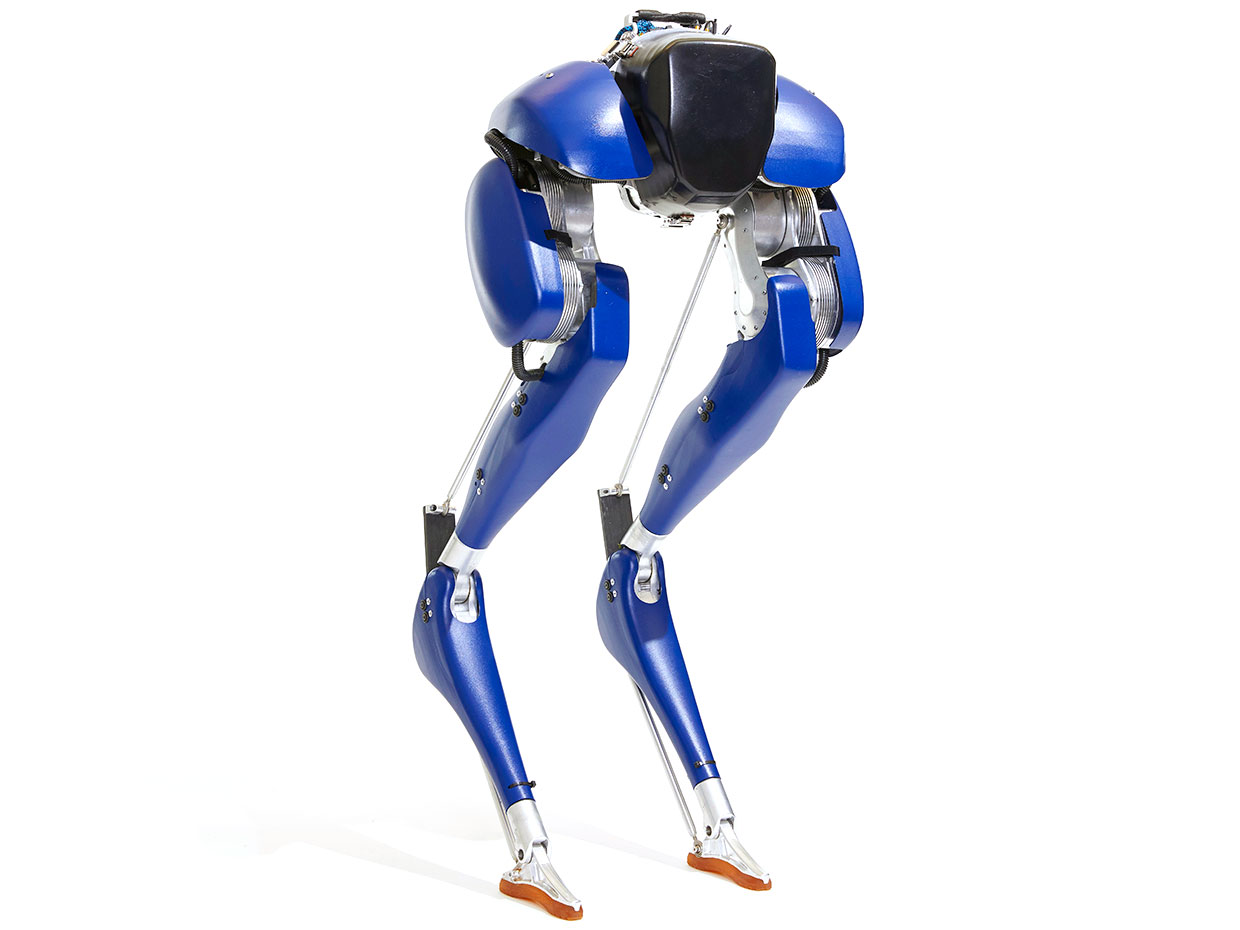 Cassie usa cinco motores e duas molas em cada perna para se deslocar em terrenos difíceis.
Cassie usa cinco motores e duas molas em cada perna para se deslocar em terrenos difíceis.Cassie, como ATRIAS, é um robô ambulante dinâmico. Otimizamos todos os aspectos de seu design para criar um robô confiável e capaz, adequado para comercialização. E colocamos a fasquia alta: queríamos que Cassie pudesse correr pela floresta, caminhar por terrenos acidentados e trabalhar por várias horas com energia da bateria sem uma suspensão de apoio.
Cassie é construída com os mesmos conceitos usados para a ATRIAS, mas decidimos fazer suas pernas totalmente novas. Anteriormente, usamos dois motores para alimentar cada quatro elos de cada perna. Esse esquema minimiza sua massa, mas há uma desvantagem: ao andar, um motor desacelera o outro, o que leva a perdas de energia. Enquanto trabalhamos em Cassie,
estudamos outras configurações de perna para eliminar esse efeito. O novo esquema permite que você diminua os motores, e o robô se tornou ainda mais eficiente que o ATRIAS.
É importante notar que a configuração da perna de Cassie foi o resultado dessa análise. O fato de o pé se parecer com o de um avestruz ou outro
terópode pode indicar que estamos no caminho certo, mas não procuramos criar um robô que, depois de cobrir com sua plumagem, pudesse se perder em um bando de emu.
Cada perna de Cassie tem cinco eixos de movimento - ou graus de liberdade, falando de maneira robótica - e cada um tem seu próprio motor. Os quadris têm três graus de liberdade, como o nosso, o que permite que a perna gire em qualquer direção. Dois outros motores têm eixos no joelho e no pé. Cassie tem graus extras de liberdade na perna e no tornozelo; eles são passivos e não são controlados por motores, mas presos a molas, o que permite que o robô se desloque por terrenos difíceis, não sujeitos a humanóides de pés chatos.
As novas pernas de Cassie exigiram a criação de um controlador de nível inferior mais sofisticado do que o ATRIAS. A ATRIAS estendeu a perna, aplicando simplesmente força igual e direção oposta ao torque dos dois motores. Com Cassie, mover as pernas em uma determinada direção requer o cálculo de diferentes torques para diferentes motores. Para isso, o controlador deve levar em consideração a inércia das pernas e a dinâmica dos motores e caixas de engrenagens.
 O controlador Cassie usa etapas planejadas e balanceamento dinâmico
O controlador Cassie usa etapas planejadas e balanceamento dinâmicoSim, a tarefa do controlador tornou-se mais difícil, mas esse método permite que você ande com mais eficiência e use uma ampla gama de comportamentos. Cassie pode andar a velocidades de até 5 km / h usando um dos primeiros controladores. O consumo de energia varia de 100 watts (em pé) a 300 watts (em movimento) e, com uma bateria de íon de lítio, ele pode funcionar por 5 horas. Além disso, novas pernas permitem a Cassia manobrar de uma maneira que ATRIAS não conseguiu. E graças ao motor na articulação do pé, ele pode permanecer em pé sem a necessidade de se mover constantemente, como ATRIAS.
Cassie também pesa apenas 31 kg, duas vezes menos que ATRIAS. Dois Cassie podem ser carregados no porta-malas de um carro em menos de um minuto. Também é mais confiável: suas peças são feitas de alumínio e fibra de carbono e a caixa de proteção é feita de plástico durável, cloreto de acrílico-polivinil, protege-o de colisões e quedas.
Até agora, Cassie não sabe correr pela floresta. Mas nós a levamos para fora sem seguro, e ela caminha no chão, grama e folhas caídas. Agora, estamos estudando a questão de integrar o comportamento dinâmico de um robô ao
planejamento de movimentos , o que permite, por exemplo, subir escadas. Também estamos trabalhando em outro recurso que tornará os robôs do tipo Cassie mais úteis: mãos.
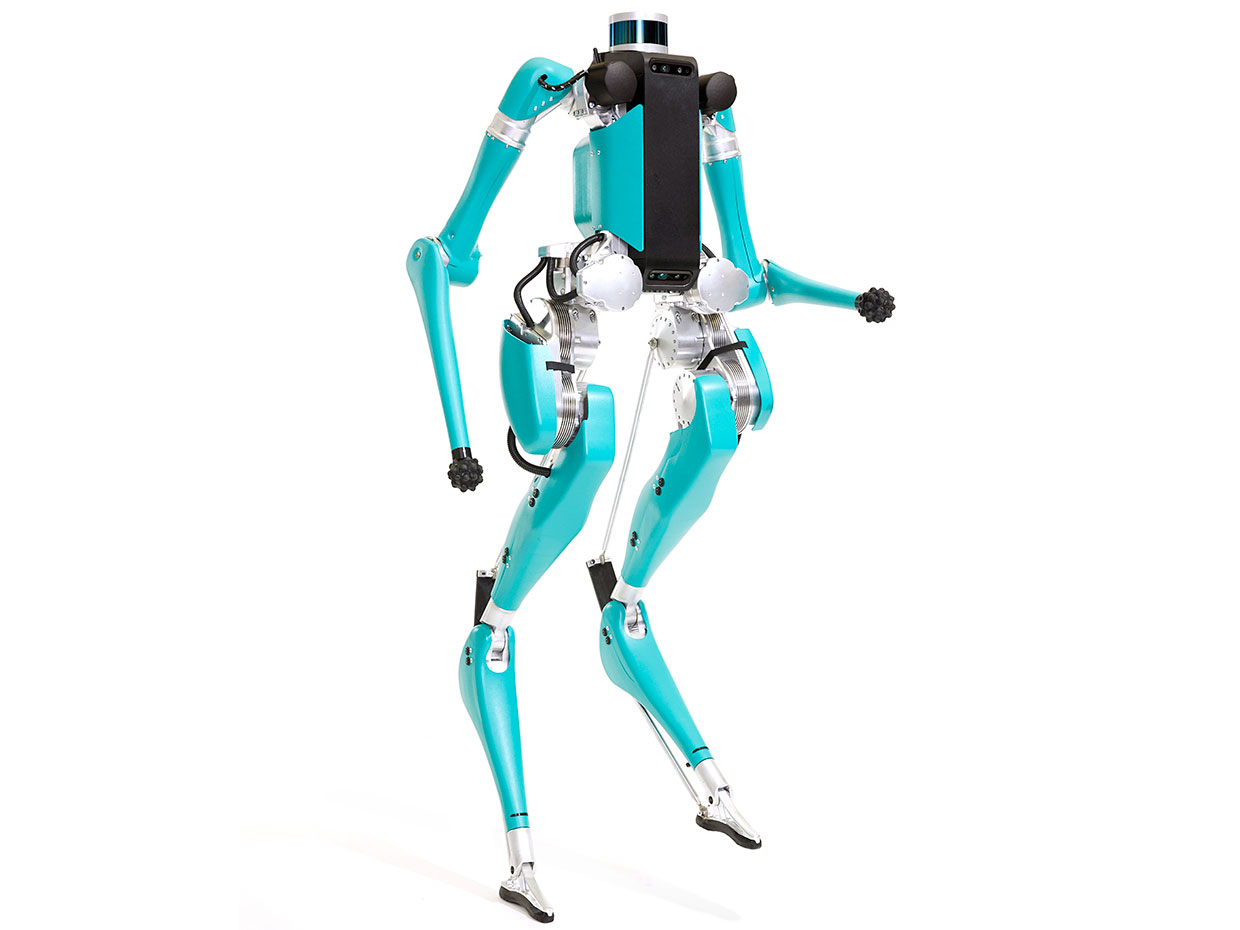 Dígito tem pernas, como Cassie, mas ele também tem um corpo com sensores internos e um par de mãos que o ajudam na mobilidade e no equilíbrio.
Dígito tem pernas, como Cassie, mas ele também tem um corpo com sensores internos e um par de mãos que o ajudam na mobilidade e no equilíbrio.Digit é um descendente direto de Cassie. Ele tem pernas semelhantes, mas adicionamos um torso com sensores internos e um par de mãos. Eles são feitos especialmente para ajudá-lo com mobilidade e equilíbrio, e balançam de acordo com a marcha. Eles também permitem ao Digit se sustentar no outono e reorientam seu corpo para se levantar.
Dígito tem outra coisa que Cassie não tem: percepção embutida. Adicionamos muitos sensores a ele, incluindo o lidar na parte superior do corpo. Os sensores o ajudam a coletar dados, o que permite que o robô se mova em um mundo cheio de obstáculos, por exemplo, em salas e degraus desordenados, e confie na dinâmica estável apenas em situações inesperadas e com erros no sensor.
O dígito e o robô com pernas que o perseguem têm muito a aprender. Mas estamos convencidos de que eles mudarão o mundo. Sua influência pode ser comparada aos automóveis em termos de mudança no estilo de vida das pessoas, padrões de tráfego e esquemas urbanos, onde esses robôs prometem transformar a logística e a entrega de pacotes.
Em um futuro próximo, quando haverá robomobiles, fabricantes de automóveis e empresas que realizam viagens conjuntas como Lyft e Uber terão suas próprias frotas enormes de carros transportando pessoas, e o tráfego máximo será na hora do rush, como hoje. Mas o que esses carros farão tarde da noite e no meio do dia? Eles podem não estar ociosos, mas transportam as parcelas dos armazéns automáticos para sua porta. No entanto, esses carros só poderão chegar à calçada - é muito difícil entregar uma encomenda a uma porta sem uma pessoa. E então os robôs ambulantes entram em cena. Eles vão andar nesses carros e andar nos últimos metros. E, embora rodas e asas possam desempenhar alguns desses papéis, em um mundo projetado para duas pernas, nenhuma outra plataforma de movimento será tão flexível quanto um robô em pé.
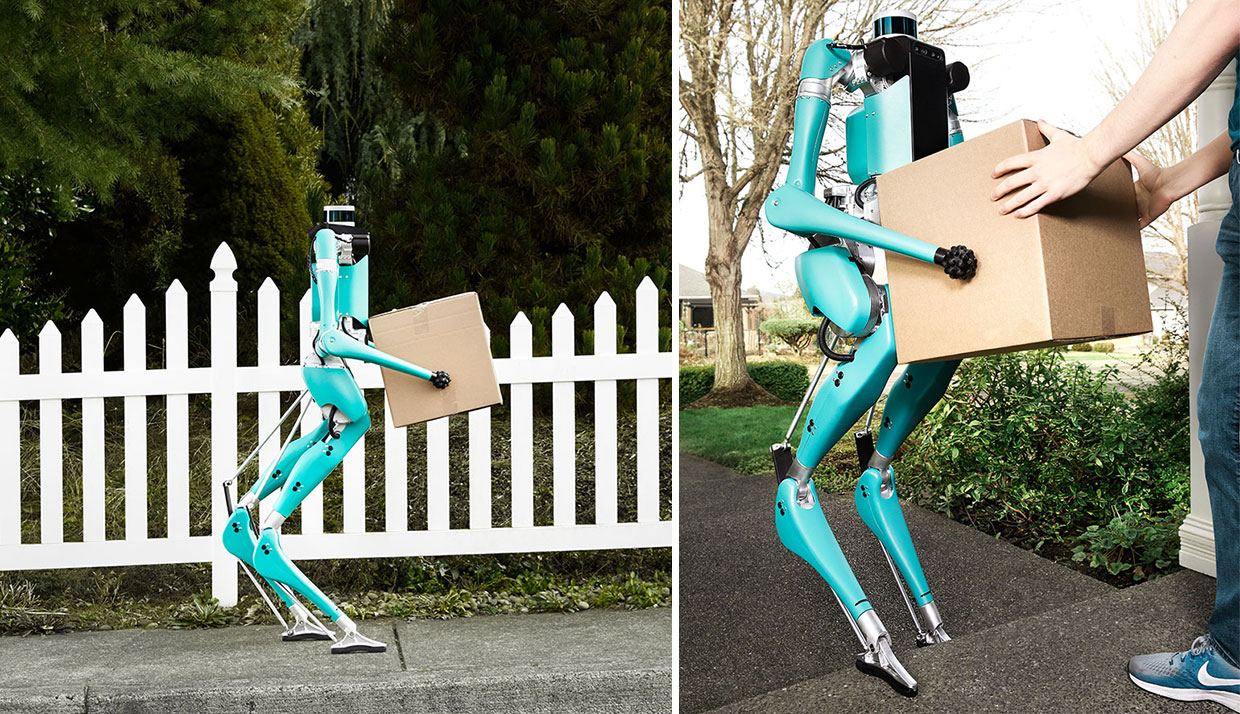 Dígito aprende a andar em terrenos diferentes e subir escadas, para que um dia ele possa entregar pacotes à porta
Dígito aprende a andar em terrenos diferentes e subir escadas, para que um dia ele possa entregar pacotes à portaOs robôs de entrega farão parte de um sistema logístico cada vez mais automatizado, onde os pacotes do fabricante são entregues imediatamente à sua porta. Esse sistema reduzirá o custo de entrega, para que a entrega das encomendas seja mais barata do que comprá-las em grandes armazéns aquecidos e bem iluminados, com acesso humano. Pequenas lojas de atacado se tornarão desnecessárias. As pessoas, é claro, poderão fazer compras para algumas coisas. Mas os produtos diários serão entregues por robôs, economizando tempo e dinheiro.
Os robôs bípedes poderão penetrar em nossas casas e escritórios. Eles podem subir as escadas e em salas lotadas, interagir com as pessoas em um nível de olho seguro e em uma escala humana, o que nos permitirá envelhecer adequadamente em nossas casas. Eles ajudarão a carregar as coisas e funcionarão como dispositivos de presença remota, o que permitirá que familiares e amigos usem o robô para se comunicar com as pessoas remotamente e mantê-las em companhia.
Os robôs de pé poderão chegar aonde as pessoas são perigosas. Eles vão de pára-quedas em incêndios florestais para coletar dados em tempo real, encontrar prédios em chamas em busca de moradores e entrar em áreas de desastre, como a usina nuclear de Fukushima, explorando áreas de difícil acesso. Eles inspecionam regularmente o interior de usinas hidrelétricas e minas abandonadas, para que não seja necessário.
Para entrar neste futuro, precisamos resolver muitos problemas. Mas estou convencido de que a comunidade de robótica pode tornar essa tecnologia prática. Este será um pequeno passo para o robô e um grande salto para toda a humanidade.