Como o tempo voa! O quarto mês terrestre de trabalho no lado oposto da lua do módulo de pouso Chang'e-4 e do veículo espacial Yutu-2 já chegou. Os dispositivos sobreviveram a um período de temperatura extremamente baixa na terceira noite de luar, agora eles saíram do modo de suspensão e começaram novos estudos da superfície lunar e do espaço sideral.
Quais câmeras estão instaladas no módulo Chang'e-4 e no veículo espacial Yutu-2 e o que as câmeras levam em longos dias lunares?
Materiais publicados anteriormente sobre a missão Chang'e-4: No momento, 88 dias (2212 horas) se passaram desde o pouso do veículo espacial Yutu-2 na superfície lunar e 115 dias (2760 horas) após o lançamento do veículo espacial Yutu-2 a partir do cosmódromo Sichan, como parte da missão Chang'e-4 na Lua.
Quarto dia lunar do outro lado da lua:
A duração planejada do módulo de pouso é de um ano, o veículo espacial - três meses.
De fato, o rover Yutu-2 já atingiu sua vida útil estimada em 2160 horas.
Este não é um recorde para as missões lunares de Chang'e, o primeiro pousador de Chang'e-3, que está na parte visível da Lua desde dezembro de 2013, ainda mostra sinais de vida (telemetria e dados de vários instrumentos), mas seu parceiro o pouso - o primeiro veículo espacial "Yutu", embora tenha perdido a mobilidade 40 dias após o início do trabalho produtivo na superfície lunar, até meados de 2016, transferiu dados para o MCC em modo estacionário.
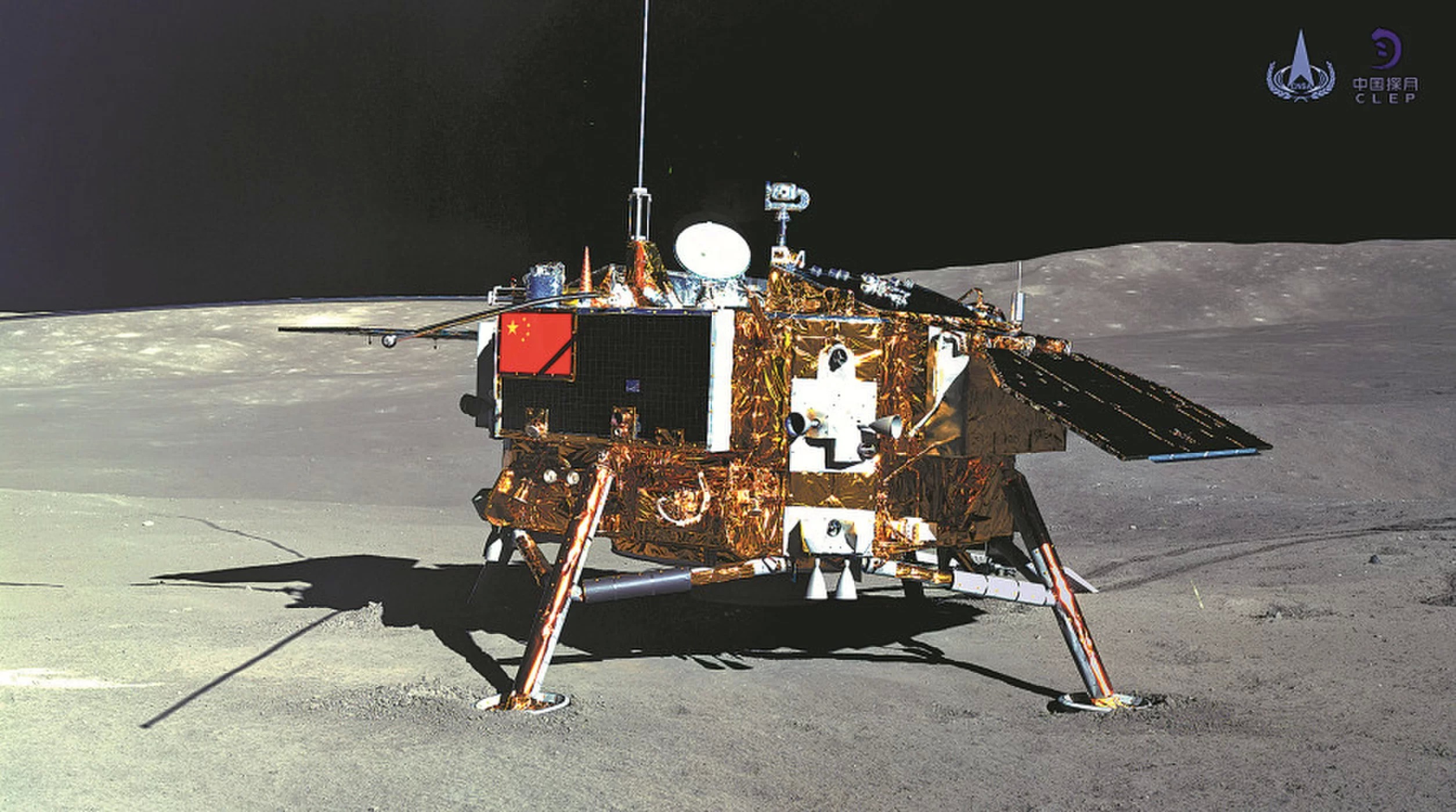
Dados sobre os módulos da missão lunar "Chang'e-4":- módulo de descida “Chang'e-4” (4,4 metros entre apoios de desembarque opostos, peso de 1200 kg.);
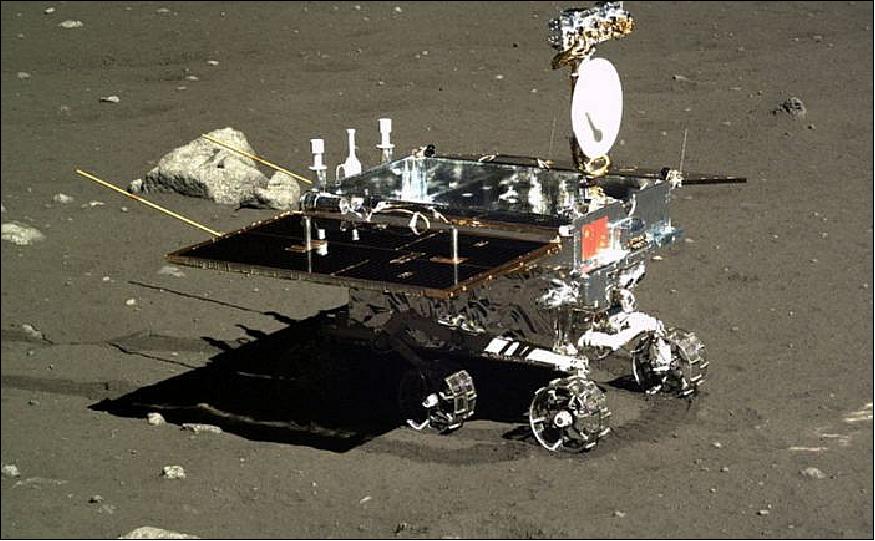
- Rover Yutu-2 (altura 1 metro, largura 1 metro (sem painéis solares), 1,5 metros de comprimento, dois painéis solares dobráveis, seis rodas, peso 140 kg.).
 Novas fotos do fundo da lua
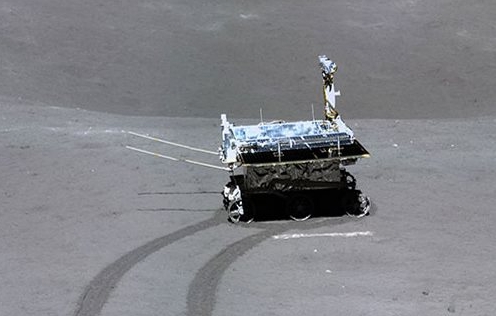
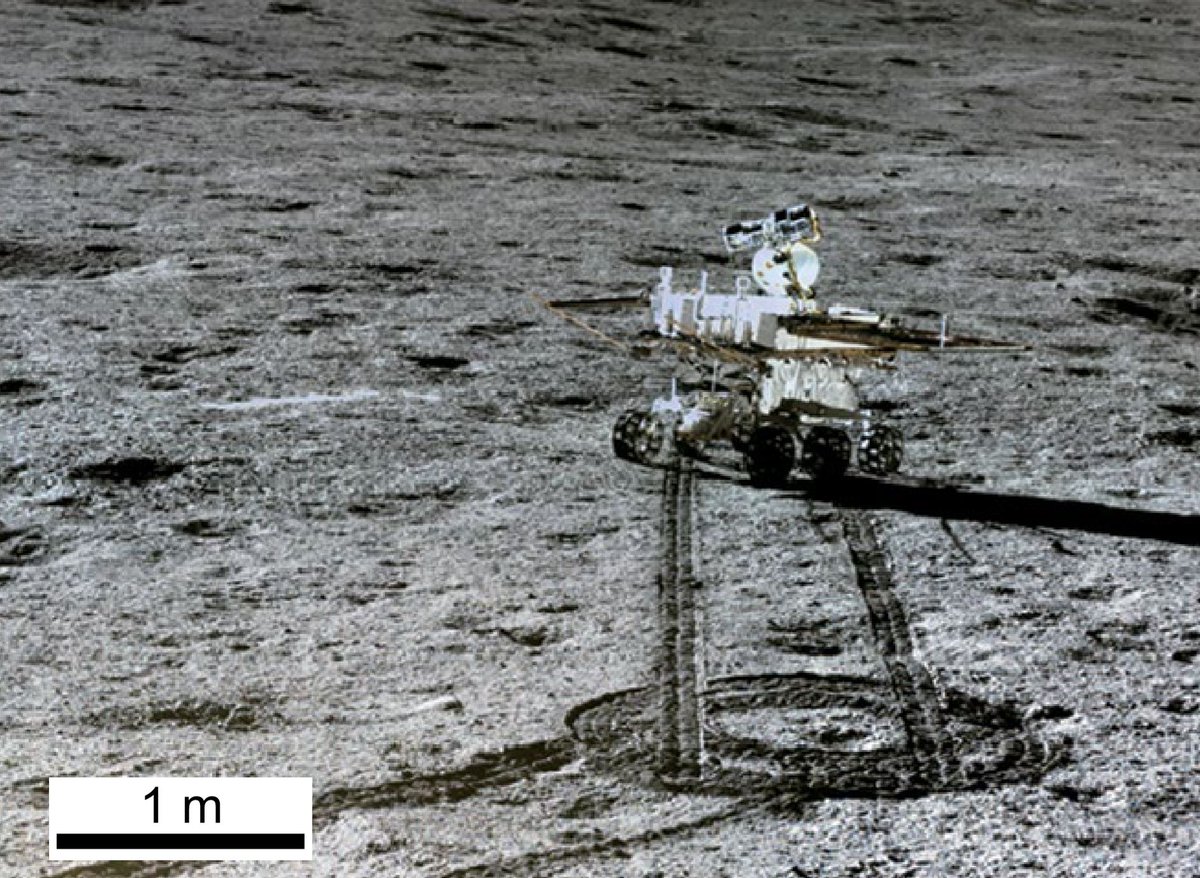
Novas fotos do fundo da luaA trilha da lua das rodas do veículo espacial Yutu-2 e a sombra da antena e da plataforma com uma câmera panorâmica:

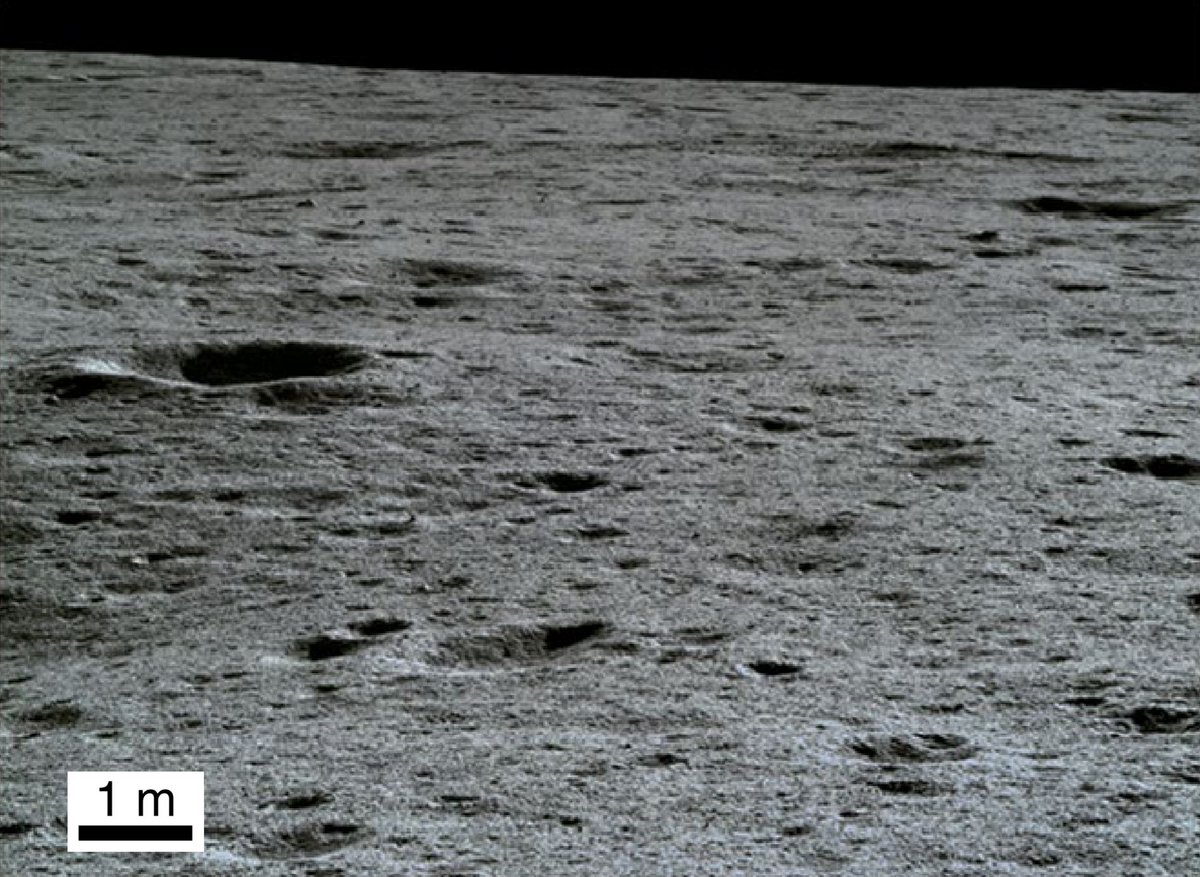
Várias crateras (com belas sombras) e montanhas ao fundo:

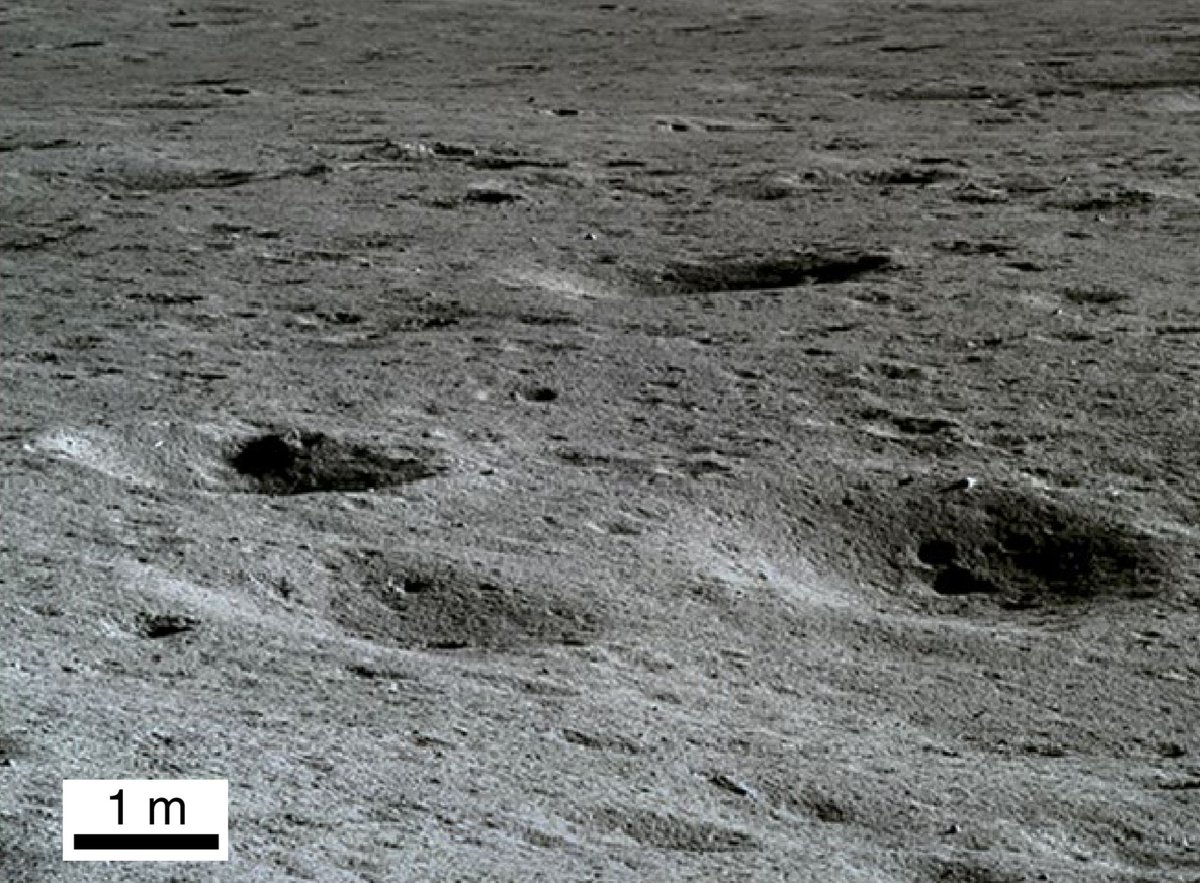
E estas são fotos do artigo científico “Lunar distante a ser explorado por Chang'e-4” da edição de abril da Nature Geoscience.

Pequenas crateras perto do local de pouso:
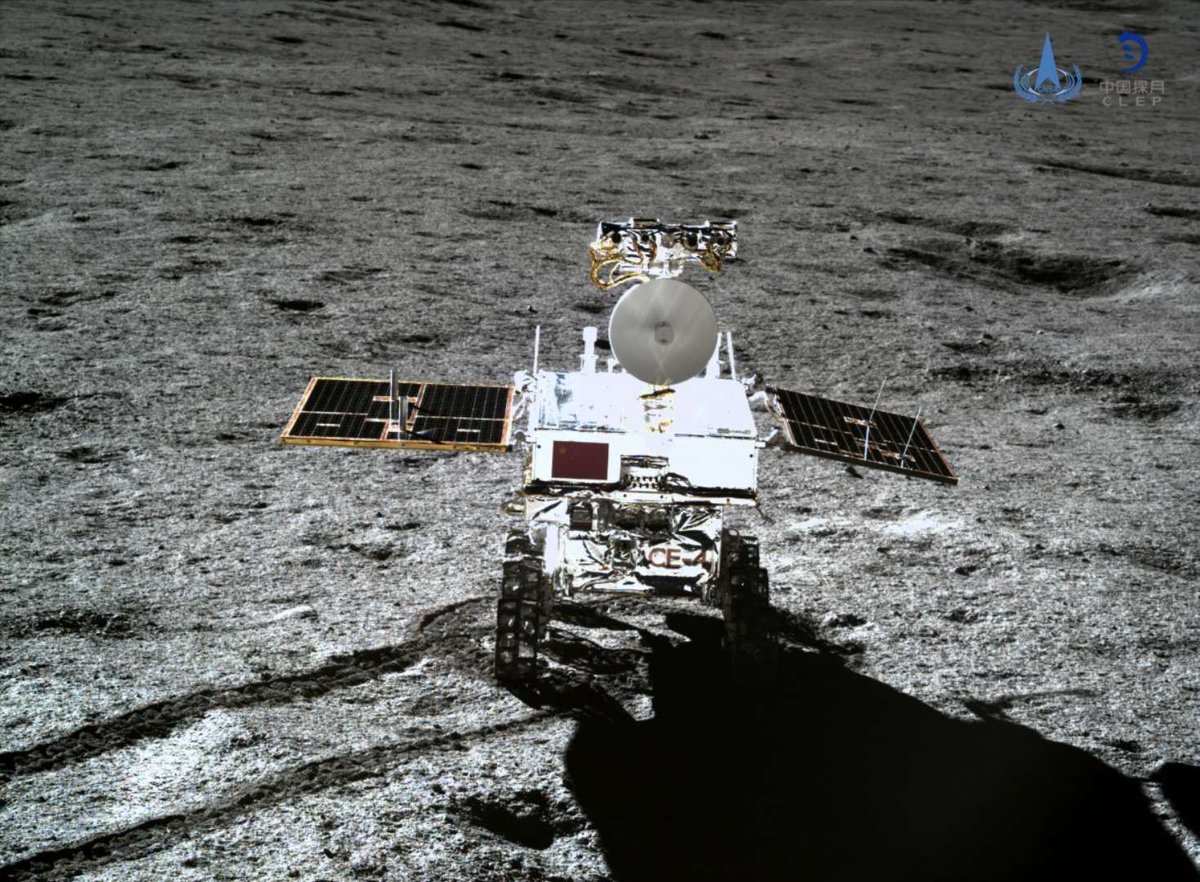
Rover "Yutu-2" explora a superfície da lua:
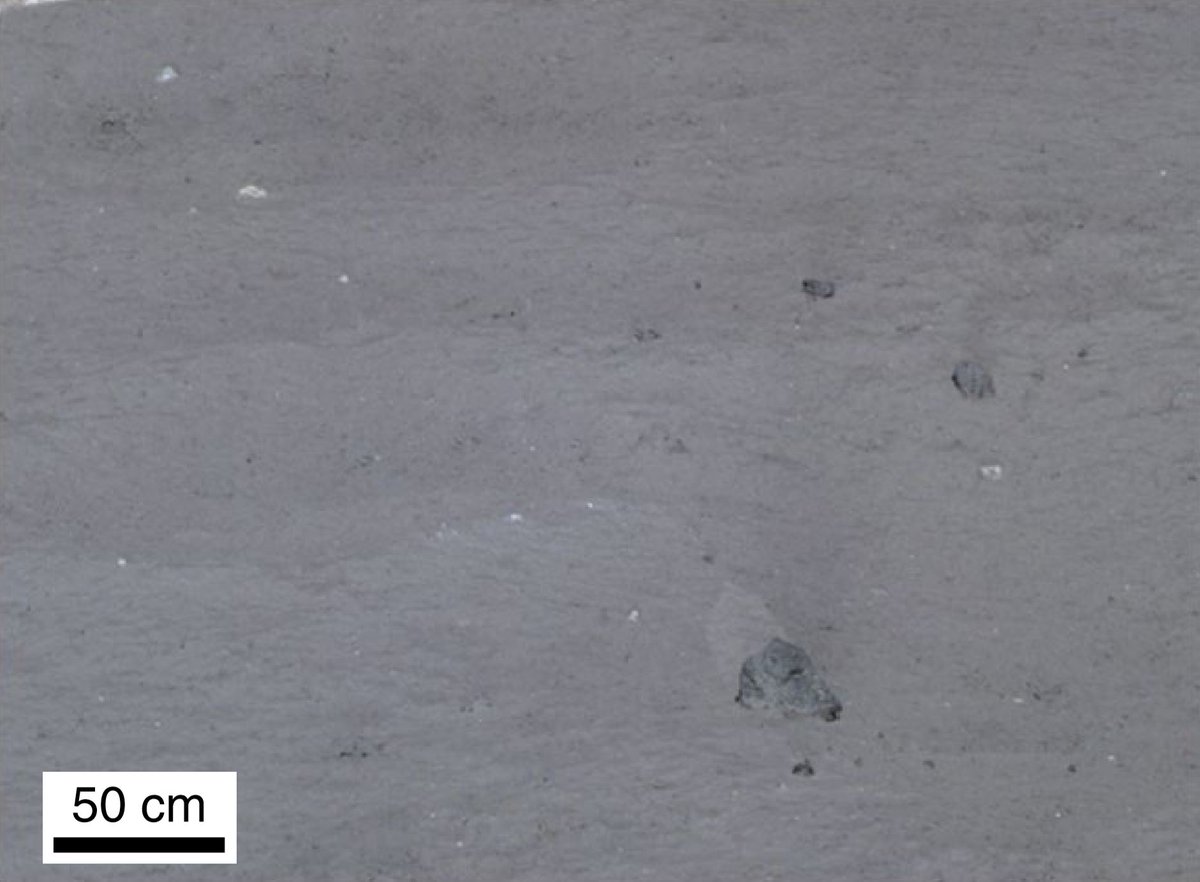
Fragmentos de pedras em pequenas crateras (foto do veículo espacial Yutu-2):
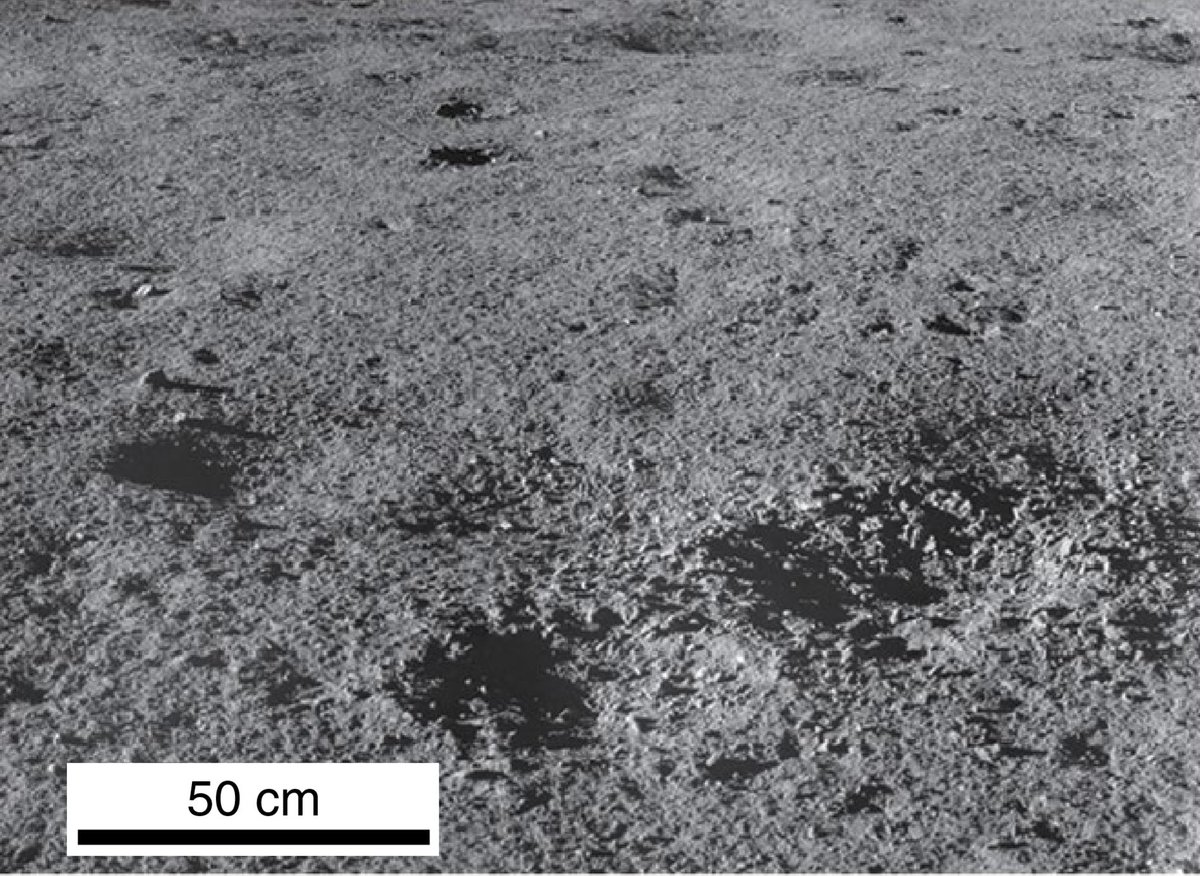
Pequenas pedras ao longo do veículo espacial Yutu-2:

Pedras escuras muito incomuns perto do local de pouso:
 Quais câmeras estão instaladas no módulo Chang'e-4 e no rover Yutu-2?Duas câmeras estão instaladas no módulo de pouso Chang'e-4:
Quais câmeras estão instaladas no módulo Chang'e-4 e no rover Yutu-2?Duas câmeras estão instaladas no módulo de pouso Chang'e-4:
- câmera de pouso (Landing camera - LCAM);
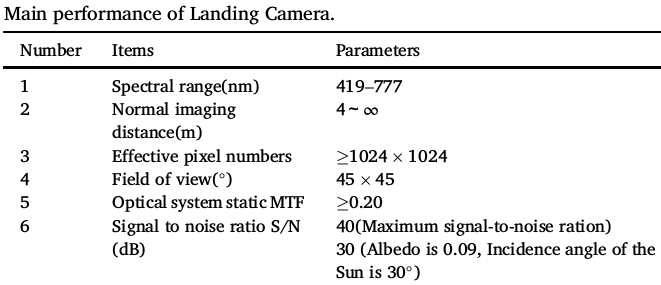
- câmera de paisagem (câmera de terreno - TCAM).A câmera de aterrissagem LCAM (0,5 kg, tamanho 116x100x70,4 mm) foi instalada na parte inferior do módulo Chang'e-4, ligada automaticamente a uma altitude de 12 km acima da superfície lunar para gravar o procedimento de aterrissagem com uma resolução de 1024x1024 pixels, 10 quadros por segundo.
Vídeo do procedimento de pouso da câmera LCAM - vários milhares de quadros são coletados em um vídeo
Características da câmara de desembarque LCAM:
O diagrama de circuito dos elementos da câmara de aterrissagem LCAM:
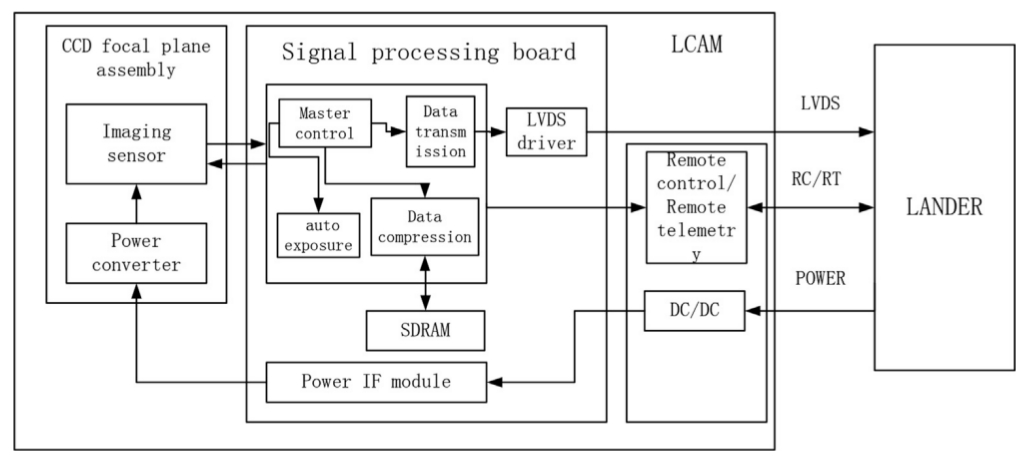
Os dados são transmitidos usando a interface LVDS (Low Voltage Differential Signaling).
Após o pouso na lua, a câmera LCAM captura apenas o mesmo quadro com o suporte de pouso:

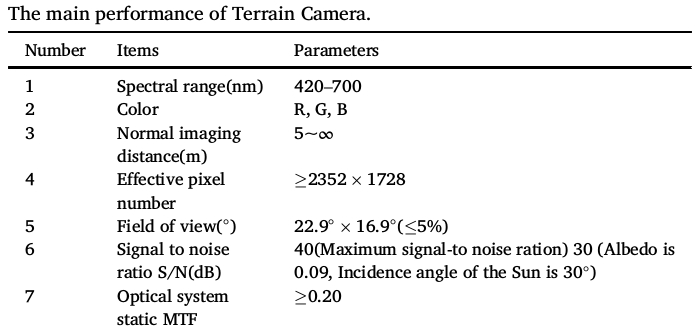
A câmera horizontal TCAM (0,64 kg, tamanho 92x105x118,9 mm) é instalada no ponto mais alto do módulo de pouso Chang'e-4 em um suporte especial que permite que a câmera gire 360 graus em torno de seu eixo e pode inclinar a câmera para cima ou para baixo em um ângulo de até 120 graus. Fotografias panorâmicas da superfície e dos elementos do módulo de pouso, rastreando o veículo espacial e explorando a área ao redor da zona de pouso são funções do TCAM.
Recursos da câmera de paisagem TCAM:
O esquema de comunicação dos elementos da câmera horizontal TCAM:
Panorama do local de desembarque:

Câmeras LCAM e TCAM no módulo de pouso:

O módulo de aterrissagem Chang'e-4 funciona em modo estacionário e suas fotografias da superfície na zona de aterrissagem são, antes de tudo, muito importantes para entender quais tipos de superfícies estão realmente ao redor do módulo. Afinal, há um grande número de pequenas crateras e pedras, e elas podem interferir (na pior das hipóteses) no procedimento para abaixar o veículo espacial. Como após o pouso, o módulo Chang'e-4 não pode mudar de posição e fazer um "salto" para outra zona mais conveniente para o pouso.
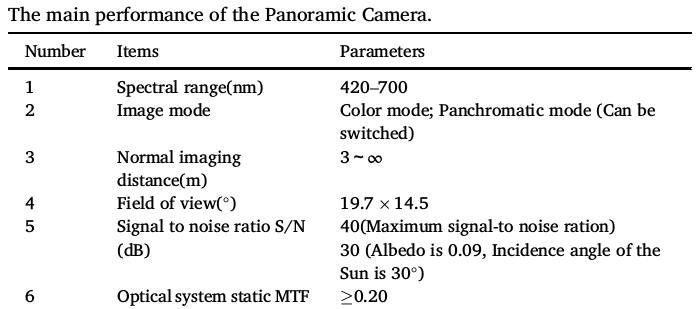
O veículo móvel Yutu-2 possui uma câmera panorâmica dupla (Câmera panorâmica - PCAM).A câmera PCAM panorâmica (0,69 kg, tamanho 90x110x120 mm) é instalada no ponto mais alto do rover Yutu-2 em um suporte de mastro largo especial, que permite que a câmera gire 360 graus em torno de seu eixo para capturar fotos panorâmicas da superfície.
Como a câmera consiste em dois módulos idênticos, eles são usados para compor uma imagem 3D usando o método de imagem estéreo binocular. Para obter uma imagem colorida em uma câmera PCAM, é usado um filtro Bayer (matrizes de filtros de cores).
Recursos da câmera panorâmica PCAM:
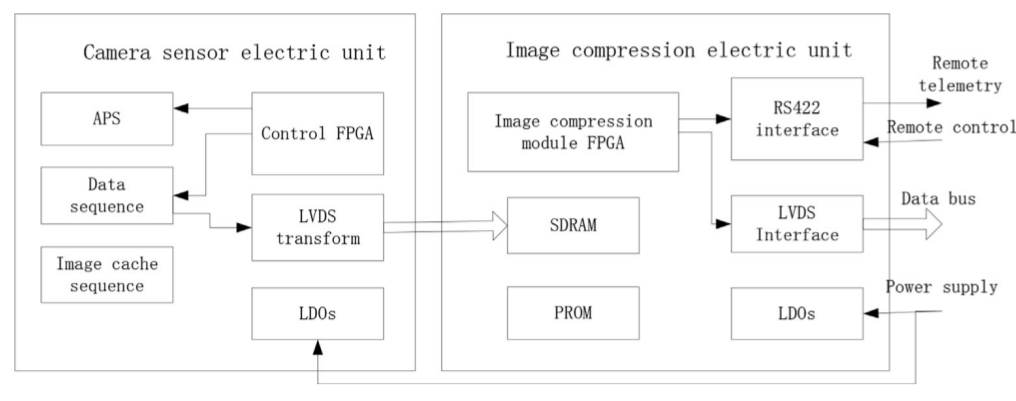
O esquema de comunicação dos elementos da câmera panorâmica PCAM:

Vista geral do panorama da superfície do veículo espacial Yutu-2:

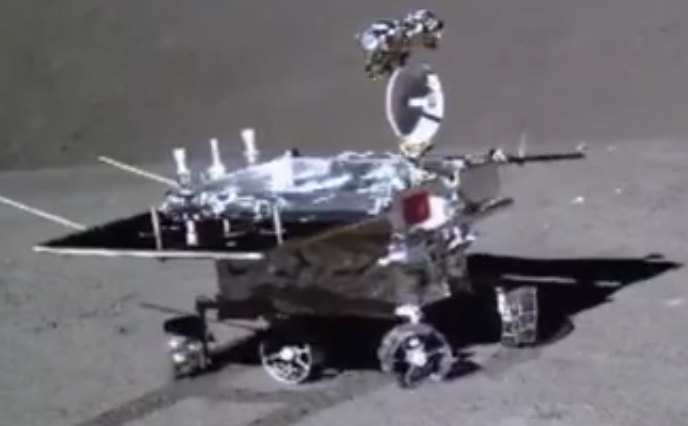
Câmera PCAM no veículo móvel:

Em 3 de janeiro de 2019, depois que todas as etapas do procedimento de pouso bem-sucedido e a instalação de canais de comunicação independentes com dispositivos Chang'e-4 (o módulo de pouso e o rover) foram concluídas, começou a era de uma foto do estudo do lado oposto da lua.
Fotos das câmeras:Câmera de aterrissagem LCAM: Câmera para terreno TCAM: Câmera panorâmica PCAM (rover): O veículo espacial Yutu-2 é um parceiro espacial móvel e altamente produtivo do módulo de pouso Chang'e-4.
O veículo espacial Yutu-2 percorreu 160 metros ao longo da complexa superfície do outro lado da lua.
O caminho do veículo espacial Yutu-2 em três dias lunares:


É interessante como as rodas dianteiras funcionam no rover Yutu-2 ao girar no lugar:

Vídeo do lançamento do veículo espacial "Yutu-2"
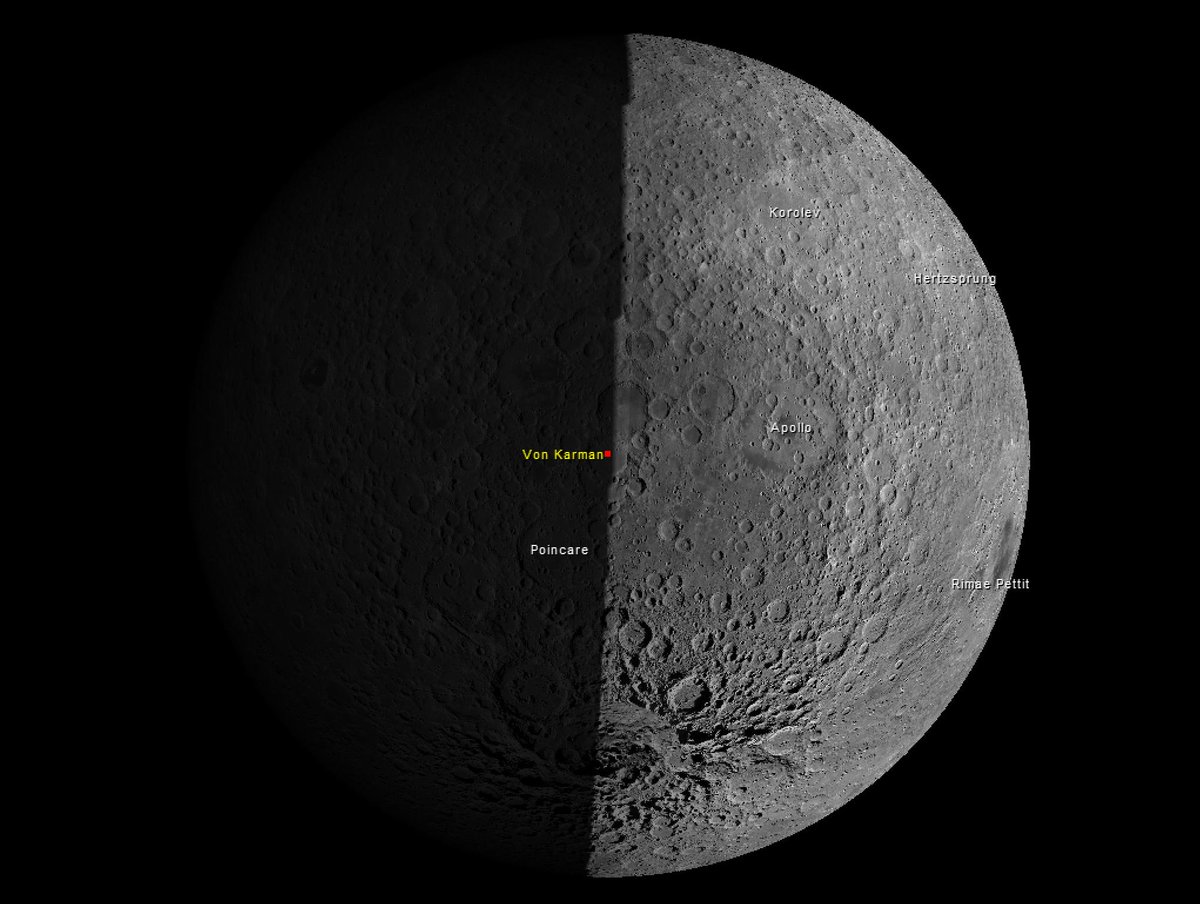
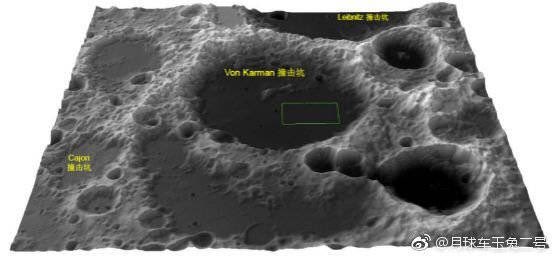
O local de pouso da missão Chang'e-4: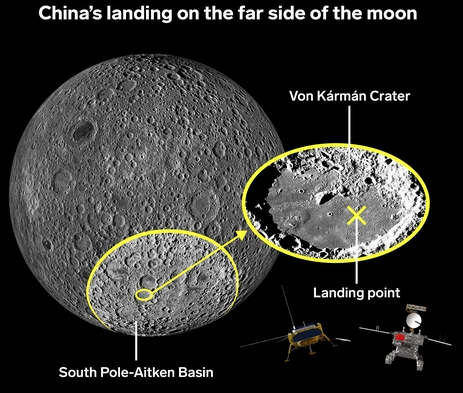
Como o lado oposto da Lua também apresenta um relevo mais complexo do que o lado visível da Terra, no processo de movimentação ao longo da superfície, o veículo espacial Yutu-2 encontrou problemas e interferências motoras mais graves, em comparação com os encontrados anteriormente pelo seu antecessor, o veículo espacial Yutu ", enviado à superfície lunar em dezembro de 2013.
Infelizmente, o primeiro veículo espacial Yutu da missão Chang'e-3, em 25 de janeiro de 2014, foi imobilizado tecnicamente (falha de elementos como resultado de uma colisão) depois de superar 114,8 metros em uma superfície lunar complexa.
A superfície lunar na zona de pouso do módulo de pouso Chang'e-4 está repleta de dobras, numerosas pedras e pequenas crateras. Depois de fazer cada um de seus pequenos movimentos, o veículo espacial Yutu-2 deve parar, fotografar a superfície e enviar esses dados de volta à Terra via satélite repetidor.
Cientistas, operadores da MCC e engenheiros da Terra processam esses dados e traçam um caminho adicional ao longo do qual o veículo espacial Yutu-2 seguirá.
As antenas rover Yutu-2 devem ser configuradas para que aponte para um satélite repetidor para enviar e receber corretamente sinais de controle, enquanto os painéis solares do rover devem ser inclinados de maneira ideal para receber uma grande quantidade de luz solar para maximizar a saída eletricidade no momento da transferência de dados.
 Rover de seis rodas "Yutu-2":
Rover de seis rodas "Yutu-2":- o peso total do veículo móvel é de cerca de 140 kg (310 lbs);
- capacidade de carga de cerca de 20 kg (44 lbs);
- pode se mover em declives e possui sensores automáticos para evitar colisão com outros objetos;
- O veículo espacial é fornecido com eletricidade por meio de dois painéis solares, permitindo que ele funcione durante um dia lunar;
- velocidade máxima de 200 metros por hora (essa velocidade na Lua ainda não pode ser alcançada - pois os elementos na superfície não permitirão acelerar e danificar o veículo espacial mais cedo);
- a área máxima de pesquisa é de 3 metros quadrados. km;
- Tempo estimado de trabalho - 3 meses (2160 horas);
- distância máxima estimada - 10 km.
Os elementos das rodas do veículo espacial Yutu-2 são, de fato, seu complexo recurso de projeto, que, na fase de projeto, teve que ser desenvolvido pelos engenheiros da Academia Chinesa de Tecnologia Espacial. Eles se recusaram a usar as faixas porque se mostraram menos sustentáveis e vulneráveis nos testes.
Por exemplo, se uma pequena pedra entrar no mecanismo da esteira, o veículo espacial poderá ficar preso e perder a trilha. Ao contrário da implementação com rodas, que é mais confiável e tem um recurso aumentado, também pode mover com segurança pedras de até 20 centímetros de altura.

No entanto, se o rover Yutu-2 rolar, ele não poderá retornar à sua posição de trabalho novamente. Os painéis solares nas laterais do veículo espacial lunar são muito frágeis, podem rachar ou ficar empoeirados após a queda, o que os tornará inutilizáveis.

Assim, no processo de controle remoto de veículos móveis, é necessário se concentrar em manter a posição do veículo móvel Yutu-2 o mais estável possível e não deixá-lo cair ao se mover pela superfície.
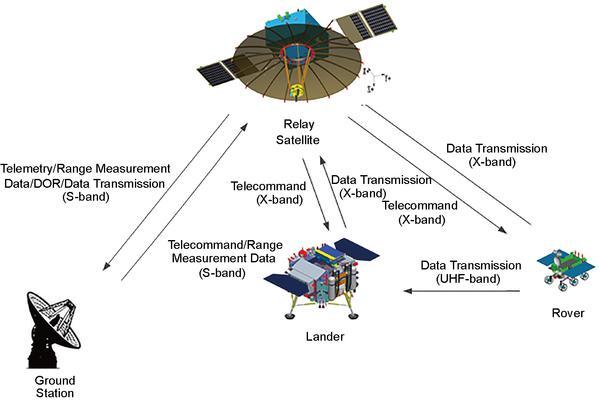
Mas como todas essas câmeras no módulo de pouso Chang'e-4 e no rover Yutu-2 podem ser controladas, transmitir dados e receber energia?Sobre os controladores a bordo e o sistema de energia do módulo de pouso e do rover.O módulo de pouso Chang'e-4 e o rover Yutu-2 têm em sua placa controladores de carga útil especiais, que são usados para receber, armazenar e controlar dados científicos provenientes de diferentes módulos e elementos de dispositivos.
Além disso, os dados dos sinais de controle, dados científicos e fotográficos que utilizam as interfaces RS-422 (telemetria e controle) e LVDS (dados científicos) são transmitidos aos controladores centrais do módulo de pouso e do rover, que os transmitem pelo sistema de comunicação à MCC na Terra usando um satélite repetidor "Tseyuqiao".
Os controladores de carga útil do módulo de pouso Chang'e-4 e do rover Yutu-2 estão equipados com um processador central e matrizes FPGA.
Além disso, com a ajuda dos elementos do controlador de carga útil, a tensão de bordo + 28V é convertida em tensão para fontes de alimentação secundárias + 5V, + -15V, + 3,3V, bem como o monitoramento constante dos valores de tensão e temperatura dos módulos do controlador e dispositivos externos.
Como microprocessador, é utilizado o seguinte: ATMEL AT697F (Processador Radar-Hard SPARC V8 de 32 bits).
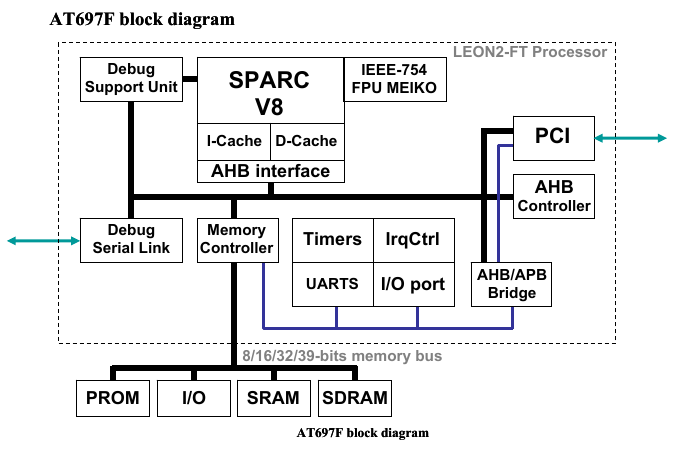
Como os circuitos lógicos programáveis (FPGA) são usados: uma matriz de seis XILINX XQR2V3000-4CCG717 (QPro Virtex-II FPGA endurecido por radiação).
Para proteção adicional do microcircuito contra radiação, telas de alumínio com espessura de pelo menos 3,8 mm são usadas.
Esquemas de comunicação e transmissão de dados do equipamento no módulo de pouso Chang'e-4: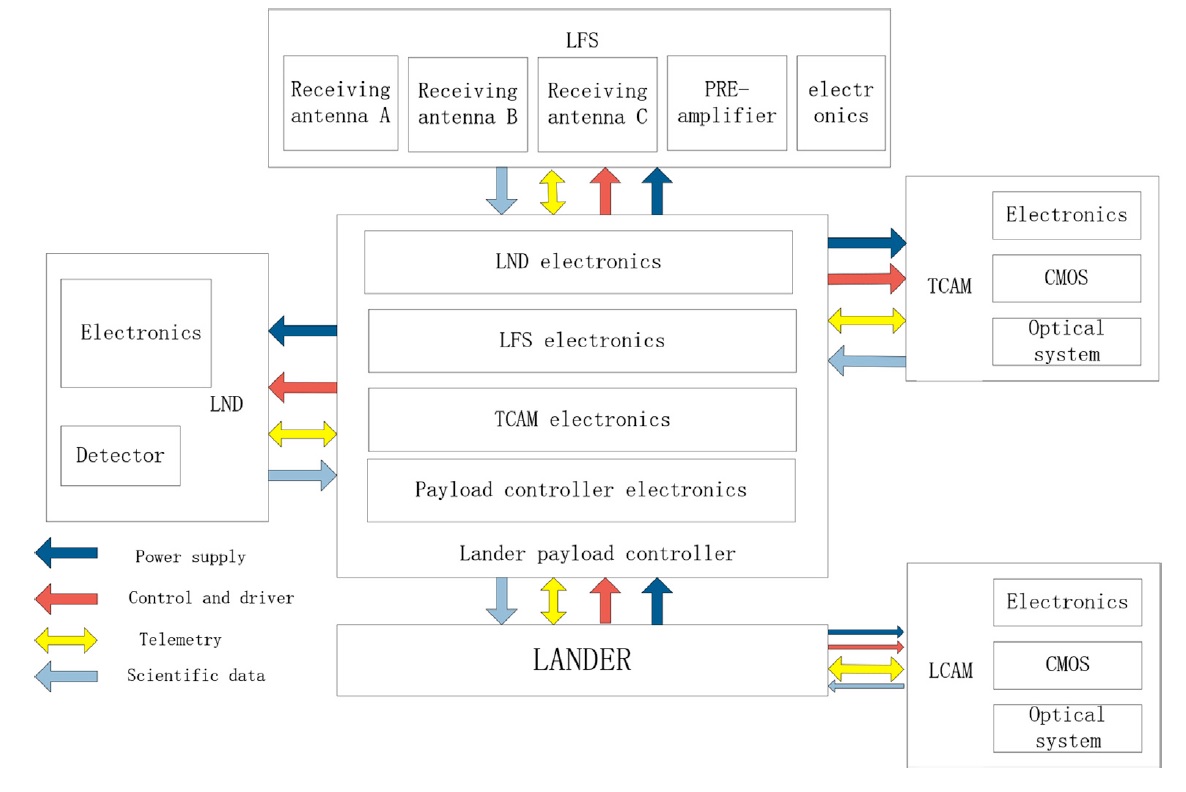
onde:
- LFS - espectrômetro de baixa frequência;
- LND - Nêutrons de Lunar Lander e Dosimetria;
- TCAM - Câmera de Terreno;
- LCAM - Câmera de aterrissagem.
Esquemas de comunicação e transmissão de dados do equipamento no rover Yutu-2: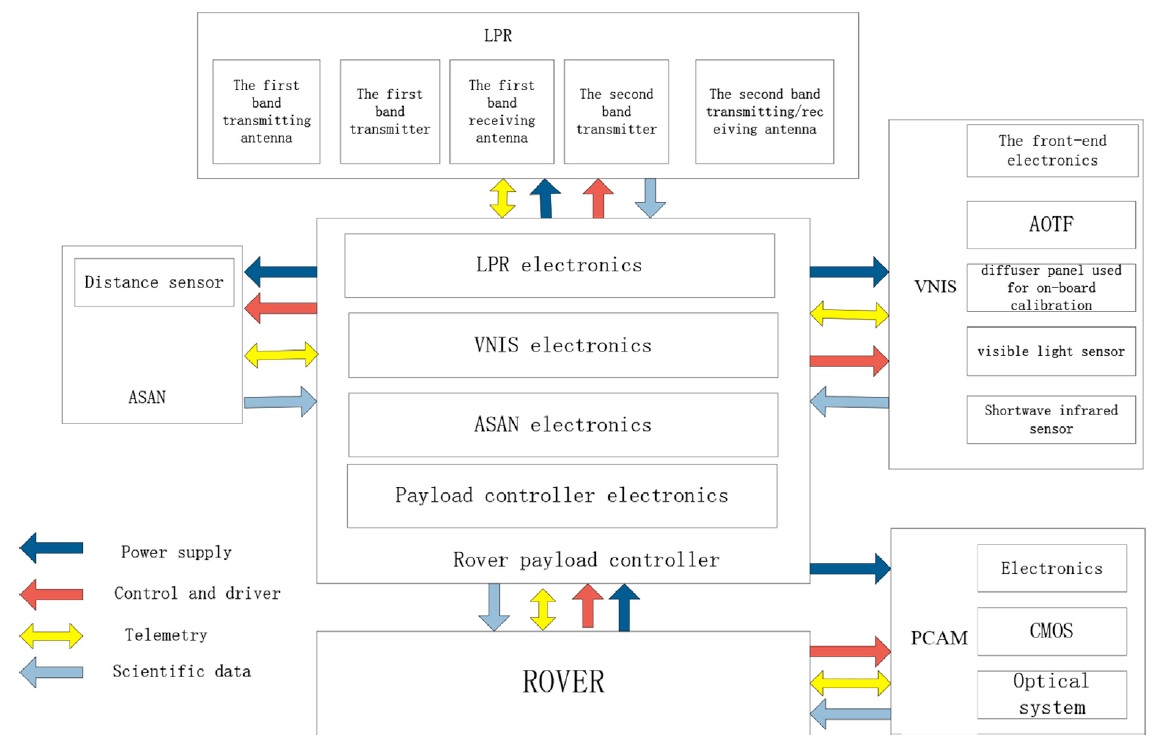
onde:
- LPR - Radar Penetrante Lunar;
- ASAN - Advanced Small Analyzer for Neutrals;
- VNIS - Espectrômetro de imagem visível e infravermelho próximo;
- PCAM - Câmera Panorâmica.
A propósito, em publicações anteriores eu já falei sobre quase todo o equipamento científico do
módulo de lançamento e do
rover , apenas um dispositivo científico permanecia incógnito - LPR (radar de penetração lunar) - que pode ser visto externamente, como duas "antenas" atrás do rover.
Vou tentar escrever sobre este interessante dispositivo uma publicação separada.