
No mundo da robótica, uma estrutura de software vem sendo desenvolvida há muito tempo e com sucesso, permitindo que você protótipo rápido de sistemas robóticos - Robot Operating System (ROS). Nós, do Sberbank Robotics Laboratory, estamos usando-o ativamente no desenvolvimento de nossos próprios projetos. Tendo adquirido alguma experiência e observando que ainda não houve uma única reunião prática sobre ROS na Rússia, decidimos organizá-la e compartilhar nossos conhecimentos e, ao mesmo tempo, conhecer a comunidade de robótica. O ROS Russian Meetup 2019 será realizado como parte do Skolkovo Robotics 2019 Forum em Skolkovo em 16 de abril. Esta é uma oportunidade para os desenvolvedores de ROS e robótica de todos os níveis se dedicarem um dia a uma troca ao vivo de experiências e comunicação com a comunidade. Se você conhece o ROS, pode ir com segurança para o
formulário de registro , as informações do programa e da organização também são colocadas lá. Na reunião, discutiremos a história do ROS e os princípios da comunidade, dedicaremos muito tempo a relatórios práticos sobre SLAM e navegação a lidar com laser interno e um planejador de trajetória de robôs. Mostraremos como controlar manipuladores industriais via ROS, como usar dados do sensor, como trabalhar com a máquina de estado SMACH. E até lhe diremos como instalar o ROS sem problemas e começar a desenvolver um robô.
A propósito, a participação na reunião é gratuita, mas como o número de vagas é limitado, solicitamos que você espere pela confirmação. E para aqueles que não estão familiarizados com o ROS, oferecemos uma pequena visão geral.
 Visão bidimensional do mundo através dos olhos do ROS
Visão bidimensional do mundo através dos olhos do ROSO Robot Operating System é uma estrutura de software para robôs que implementa os algoritmos básicos para a construção de robôs complexos. Ele inclui um conjunto de ferramentas, bibliotecas e padrões projetados para simplificar a tarefa de criar um comportamento complexo e confiável do robô em uma ampla variedade de plataformas robóticas.
A principal ideologia do projeto são os princípios de código aberto, documentação de pacotes, reutilização de código e a comunidade global de robótica.
Por que foi criado
Criar um software robótico universal verdadeiramente confiável é difícil. Do ponto de vista do robô, problemas que parecem triviais para a pessoa resultam na alta complexidade da programação do sistema robótico pelo desenvolvedor. É tão difícil trabalhar com essas tarefas que às vezes não é possível resolvê-las sozinhas ou em uma pequena equipe.
Como resultado, o ROS foi criado desde o início para estimular o desenvolvimento de software colaborativo para robótica. Por exemplo, um laboratório pode ter especialistas em SLAM internos e pode oferecer um sistema SLAM de classe mundial. Outro grupo poderia ter especialistas no uso do SLAM para navegação, e outro grupo poderia desenvolver uma abordagem de visão por computador que funcionasse bem para reconhecer pequenos objetos em um ambiente confuso. O ROS foi projetado especificamente para esses grupos colaborarem e desenvolverem o trabalho uns dos outros.
Fundo curto
ROS é um grande projeto com uma história e um grande número de participantes. A necessidade de um sistema aberto de colaboração foi necessária por muitas pessoas na comunidade de pesquisa em robótica, e muitos projetos foram criados para esse fim.
Em meados dos anos 2000, a Universidade de Stanford fez vários esforços relacionados ao uso da IA em robótica, por exemplo, o programa STanford AI Robot (STAIR) e o programa Personal Robots (PR) para criar protótipos personalizados de sistemas de software dinâmicos projetados para uso em robótica . Em 2007, a Willow Garage forneceu recursos significativos para expandir ainda mais esses conceitos e criar protótipos. Os esforços foram apoiados por inúmeros pesquisadores que compartilharam seu tempo e experiência para contribuir com as idéias básicas do ROS e com os principais pacotes de software. Todo o software foi desenvolvido usando a licença de código aberto BSD e gradualmente se tornou uma plataforma amplamente usada na comunidade de pesquisadores de robótica.
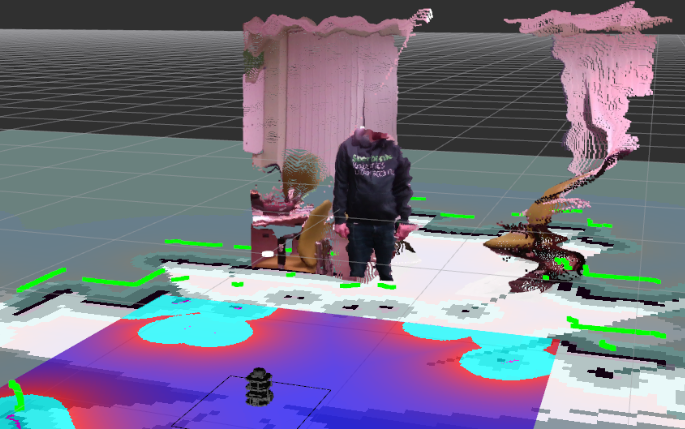 Visão tridimensional do mundo através dos olhos do ROS
Visão tridimensional do mundo através dos olhos do ROS
Comunidade Global ROS
Desde o início, o ROS foi desenvolvido em várias instituições e para vários robôs, incluindo muitas instituições que receberam robôs PR2 da Willow Garage. Embora seja muito mais fácil para todos os participantes hospedar seu código nos mesmos servidores, com o tempo o modelo "federado" se tornou um dos pontos fortes do ecossistema ROS. Qualquer grupo pode executar seu próprio repositório de código ROS em seus próprios servidores, e ele é o proprietário e o controle completamente. Eles não precisam da permissão de ninguém. Se eles decidirem disponibilizar seu repositório publicamente, poderão obter o reconhecimento da comunidade que merecem por suas realizações e se beneficiar de testadores e sugestões de melhoria, como todos os projetos de código aberto.
Nos últimos anos, o ROS cresceu e agora inclui uma grande comunidade de usuários em todo o mundo. Historicamente, a maioria dos usuários esteve em laboratórios de pesquisa, mas cada vez mais aparece no setor comercial, especialmente em robótica industrial e de serviços.
A comunidade ROS é muito ativa e tem mais de 3.000 membros na lista discourse.ros.org, mais de 8.000 usuários no wiki de documentação conjunta e cerca de 22.500 usuários no site para obter respostas às perguntas dos ROS. A Wikipedia contém mais de 22.000 páginas e o ritmo das edições é de cerca de 30 por dia.
No momento, o número de usuários de ROS de língua russa está em 15º lugar entre outros países, de acordo com o ROS Metrics Report 2018. Vamos nos encontrar, discutir e corrigi-lo. Você também pode aprender sobre os recursos de ROS para seus projetos, sobre a prática real de desenvolver robôs.
Para participar como ouvinte, preencha o
formulário .
E se você tiver uma mensagem interessante para a comunidade, ainda
poderá se
tornar um orador .
Programa: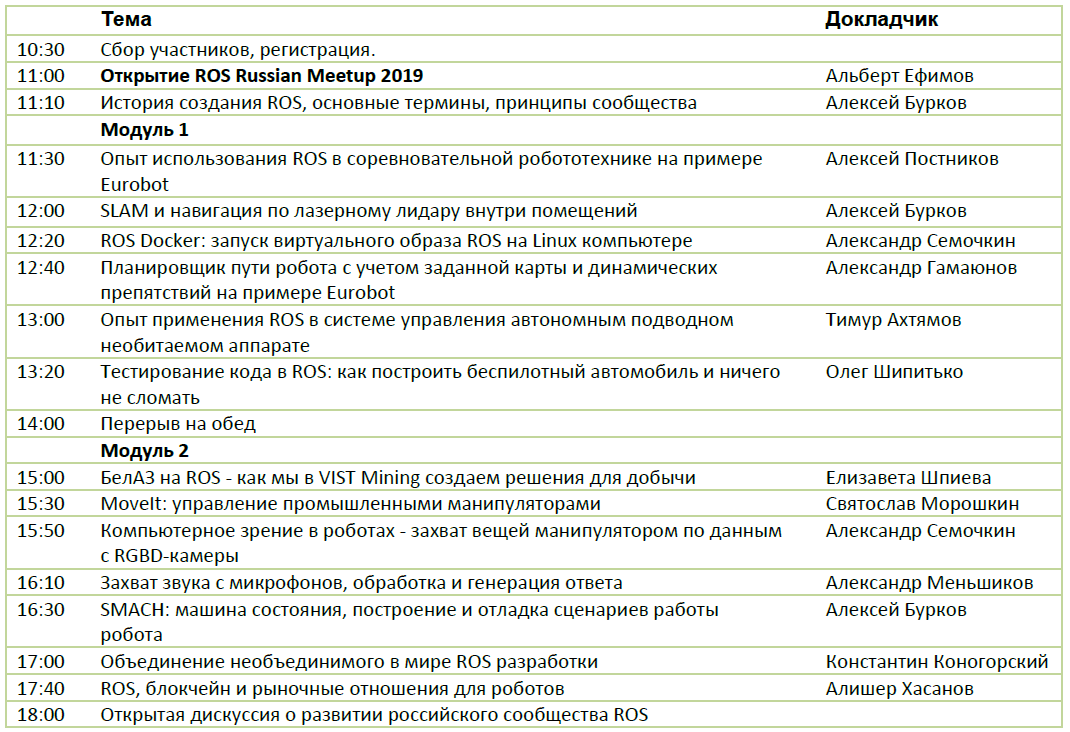
O evento é organizado pelo Laboratório de Robótica Sberbank.